
ФЕДЕРАЛЬНОЕ
АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|
НАЦИОНАЛЬНЫЙ |
ГОСТ
Р (Правила |

ЕДИНООБРАЗНЫЕ
ПРЕДПИСАНИЯ,
КАСАЮЩИЕСЯ ТРАНСПОРТНЫХ СРЕДСТВ
КАТЕГОРИЙ М, N и О
В ОТНОШЕНИИ ТОРМОЖЕНИЯ
Regulation № 13
Uniform provisions concerning the approval
of vehicles of categories M, N and О
with regard to braking
(MOD)
|
|
МоскваСтандартинформ 2009 |
Предисловие
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении (ВНИИНМАШ) на основе русской версии Правил ЕЭК ООН № 13, указанных в пункте 4
2 ВНЕСЕН Управлением технического регулирования и стандартизации Федерального агентства по техническому регулированию и метрологии
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 23 октября 2007 г. № 275-ст
4 Настоящий стандарт является модифицированным по отношению к Правилам ЕЭК ООН № 13 (включая поправки серии 10) «Единообразные предписания, касающиеся официального утверждения транспортных средств категорий М, N и О в отношении торможения» (Regulation № 13 «Uniform provisions concerning the approval of vehicles of categories M, N and О with regard to braking») путем изменения его структуры.
Сопоставление структуры настоящего стандарта со структурой Правил ЕЭК ООН № 13 приведено в дополнительном приложении Ш. При этом из наименования стандарта исключены слова «официальное утверждение», относящиеся к процедуре подтверждения соответствия (сертификации). Термины и положения, касающиеся процедур сертификации, не предусмотрены ГОСТ Р 1.5-2004 и, в соответствии с Федеральным законом № 184-ФЗ «О техническом регулировании», могут быть применены только в технических регламентах. По той же причине отдельные фразы и слова, относящиеся к процедуре сертификации, заменены на фразы и слова, относящиеся к испытаниям. Такие фразы и слова выделены курсивом. В стандарт введен раздел «Нормативные ссылки», предусмотренный ГОСТ Р 1.5-2004 и выделенный курсивом. В стандарт не включены разделы и приложения, относящиеся к процедуре сертификации или международному порядку применения Правил ЕЭК ООН
5 ВЗАМЕН ГОСТ Р 41.13-99 (Правила ЕЭК ООН № 13)
Информация об изменениях к настоящему стандарту публикуется в ежегодно издаваемом информационном указателе «Национальные стандарты», а текст изменений и поправок - в ежемесячно издаваемых информационных указателях «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ежемесячно издаваемом информационном указателе «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет
Содержание
ГОСТ Р 41.13-2007
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЕДИНООБРАЗНЫЕ
ПРЕДПИСАНИЯ, КАСАЮЩИЕСЯ
ТРАНСПОРТНЫХ СРЕДСТВ КАТЕГОРИЙ М, N и О
В ОТНОШЕНИИ ТОРМОЖЕНИЯ
Uniform provisions concerning the vehicles of categories M, N and О with regard to braking
Дата введения - 2009-01-01
Настоящий стандарт вводит в действие Правила ЕЭК ООН № 13 с поправками серии 10.
1 Область применения
1.1 Настоящий стандарт устанавливает требования к торможению одиночных транспортных средств (далее - ТС), относящихся к категориям 1) М, N и О.
__________
1) Категории ТС - по ГОСТ Р 52051.
1.2 Настоящий стандарт не распространяется:
1.2.1 на ТС, конструктивная скорость которых не превышает 25 км/ч;
1.2.2 на прицепы, которые запрещается соединять с механическими ТС, конструктивная скорость которых превышает 25 км/ч;
1.2.3 на ТС, оборудованные для их управления людьми с ограниченными возможностями (инвалидами);
1.2.4 на оборудование, устройства и методы, указанные в приложении А.
1а Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ Р 41.10-99 (Правила ЕЭК ООН № 10) Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении электромагнитной совместимости
ГОСТ Р 41.54-99 (Правила ЕЭК ООН № 54) Единообразные предписания, касающиеся официального утверждения шин для грузовых транспортных средств и их прицепов
ГОСТ Р 41.64-99 (Правила ЕЭК ООН № 64) Единообразные предписания, касающиеся официального утверждения транспортных средств, оборудованных запасными колесами/шинами для временного пользования
ГОСТ Р 52051-2003 Механические транспортные средства и прицепы. Классификация и определения
ГОСТ 29200-91 (ИСО 9128-87) Транспорт дорожный. Графические символы, обозначающие типы тормозных жидкостей
Примечание - При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования - на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
2 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями:
2.1 транспортное средство (vehicle)
2.1.1 механическое транспортное средство (mechanical vehicle, power-driven vehicle): Любое самоходное транспортное средство категорий M u N в соответствии с классификацией, установленной ГОСТ Р 52051.
2.1.2 прицеп (trailer): Несамоходное транспортное средство категории О в соответствии с классификацией, установленной ГОСТ Р 52051, сконструированное и предназначенное для буксирования механическим транспортным средством.
2.1.2.1 полный прицеп (full trailer): Прицеп, имеющий не менее двух осей и оборудованный буксирным устройством, которое может перемещаться вертикально по отношению к прицепу и служит для поворота передней(их) оси(ей), но не передает какой-либо значительной нагрузки на буксирующее транспортное средство.
2.1.2.2 полуприцеп (semi-trailer): Прицеп, ось(и) которого расположены) позади центра масс прицепа (при равномерной загрузке) и который оборудован сцепным устройством, позволяющим передавать горизонтальную и вертикальную нагрузки на буксирующее транспортное средство.
2.1.2.3 прицеп с центральной осью (center-axle trailer): Прицеп, оборудованный буксирным устройством, которое не может перемещаться вертикально (по отношению к прицепу), и ось(и) которого расположена(ы) вблизи центра масс прицепа (при равномерной загрузке) так, что на буксирующее транспортное средство передается только незначительная статическая вертикальная нагрузка, не превышающая либо 10% соответствующей максимальной массы прицепа, либо 10 кН (в зависимости от того, какая из этих величин меньше).
2.2 тип транспортного средства (vehicle type): Транспортные средства, не имеющие между собой существенных различий в отношении следующих характеристик:
2.2.1 в случае механических транспортных средств:
2.2.1.1 категории транспортного средства (см. 1.1);
2.2.1.2 максимальной массы (в соответствии с определением, содержащимся в 2.17);
2.2.1.3 распределения массы по осям;
2.2.1.4 максимальной конструктивной скорости;
2.2.1.5 тормозных устройств различного типа, в частности наличия или отсутствия устройств для торможения прицепа, наличия системы электрического рекуперативного торможения;
2.2.1.6 числа, расположения и конструкции осей;
2.2.1.7 типа двигателя;
2.2.1.8 числа передач и значений передаточных чисел;
2.2.1.9 передаточных чисел ведущих мостов;
2.2.1.10 размеров шин;
2.2.2 в случае прицепов:
2.2.2.1 категории транспортного средства (см. 1.1);
2.2.2.2 максимальной массы (в соответствии с определением, содержащимся в 2.17);
2.2.2.3 распределения массы по осям;
2.2.2.4 типа тормозных устройств;
2.2.2.5 числа и расположения и конструкции осей;
2.2.2.6 размеров шин.
2.3 тормозная система (braking system): Совокупность частей - органа управления, тормозного привода и собственно тормоза, предназначенных для постепенного замедления движущегося транспортного средства или его остановки, или для удерживания его в неподвижном состоянии после остановки.
Примечание - Перечисленные функции тормозной системы определены в 5.1.2.
2.4 орган управления (control): Часть тормозной системы, на которую непосредственно воздействует водитель (или в случае прицепа соответствующей конструкции - сопровождающее лицо), обеспечивая подачу в тормозной привод энергии, необходимой для торможения, или управляя такой подачей.
Примечание - Этой энергией может быть или мускульная энергия водителя, или энергия из другого источника, управляемого водителем, или кинетическая энергия прицепа, или сочетание этих видов энергии.
2.4.1 активизация (actuation): Воздействие на орган управления или прекращение воздействия.
2.5 тормозной привод (transmission): Совокупность элементов, расположенных между органом управления и тормозом и обеспечивающих функциональную связь между ними.
Примечания
1 Тормозной привод может быть механическим, гидравлическим, электрическим и гибридным. Если торможение осуществляется полностью или частично с помощью источника энергии, не зависящего от водителя, аккумулятор энергии в системе также является частью тормозного привода.
2 Тормозной привод состоит из двух частей - управляющего привода и передатчика энергии. В тех случаях, когда в настоящем стандарте термин «тормозной привод» применяют без уточнения, подразумевают как управляющий привод, так и передатчик энергии. Управляющую и питающую магистрали между тягачом и прицепом не следует рассматривать как части тормозного привода.
2.5.1 управляющий привод (control transmission): Совокупность элементов тормозного привода, контролирующих работу тормозов, в том числе исполнение управляющей функции, включая необходимый(е) аккумулятор(ы) энергии.
2.5.2 энергетический привод (energy transmission): Совокупность элементов, обеспечивающих снабжение тормозов энергией, необходимой для их функционирования, включая аккумулятор(ы) энергии, необходимый(е) для работы тормозов.
2.6 тормоз (brake): Устройство, в котором возникают силы, препятствующие движению транспортного средства.
Примечание - Таким устройством может быть фрикционный тормоз (когда силы возникают благодаря трению между двумя элементами транспортного средства, перемещающимися один относительно другого), электрический тормоз (когда силы возникают благодаря электромагнитному взаимодействию между двумя элементами транспортного средства, перемещающимися один относительно другого, но не соприкасающимися друг с другом), гидравлический тормоз (когда силы возникают под воздействием жидкости, находящейся между двумя элементами транспортного средства, перемещающимися один относительно другого) или двигательный тормоз (когда силы возникают в результате искусственного увеличения тормозящего воздействия, передающегося от двигателя на колеса).
2.7 тормозные системы различных типов (different types of braking system): Системы, различающиеся между собой по таким существенным признакам, как:
2.7.1 характеристики элементов тормозной системы;
2.7.2 характеристики материалов, из которых изготовлен хотя бы один элемент, или форма или размеры такого элемента;
2.7.3 комбинации элементов в тормозных системах в сборе.
2.8 элемент тормозной системы (component of braking system): Одна из частей, совокупность которых после сборки образует тормозную систему.
2.9 неразделенное торможение (continuous braking): Торможение комбинации транспортных средств (автопоезда), осуществляемое тормозной системой, имеющей следующие особенности:
2.9.1 единый орган управления, который водитель постепенно активизирует одним плавным движением со своего рабочего места;
2.9.2 один источник, из которого поступает энергия, предназначенная для торможения транспортных средств, образующих комбинацию, причем такой энергией может быть мускульная энергия водителя;
2.9.3 одновременное торможение всех транспортных средств, образующих комбинацию, или же торможение с определенным смещением по фазе одного транспортного средства относительно другого вне зависимости от их взаимного положения.
2.10 полуразделенное торможение (semi-continuous braking): Торможение комбинации транспортных средств (автопоезда), осуществляемое тормозной системой, имеющей следующие особенности:
2.10.1 единый орган управления, который водитель постепенно активизирует одним плавным движением со своего рабочего места;
2.10.2 два отдельных источника энергии (одним из которых может быть мускульная энергия водителя), предназначенной для торможения транспортных средств, образующих комбинацию;
2.10.3 одновременное торможение всех транспортных средств, образующих комбинацию, или же торможение с определенным смещением по фазе одного транспортного средства относительно другого вне зависимости от их взаимного положения.
2.11 автоматическое торможение (automatic braking): Торможение прицепа или прицепов, осуществляемое автоматически в случае разъединения транспортных средств, образующих комбинацию, включая разрыв сцепного устройства, при этом эффективность торможения остальных транспортных средств, входивших в комбинацию до разъединения, не должна ухудшаться.
2.12 инерционное торможение (inertia or overrun braking): Торможение, использующее силу, возникающую при приближении прицепа к тягачу.
2.13 регулируемое торможение (progressive and graduated braking): Торможение, при котором в пределах нормального диапазона условий работы оборудования в процессе активизации тормозов (см. 2.4.1):
2.13.1 водитель может в любой момент увеличить или уменьшить тормозную силу соответствующим воздействием на орган управления;
2.13.2 тормозная сила изменяется пропорционально воздействию на орган управления таким образом, что при увеличении воздействия на орган управления тормозная сила увеличивается, а при уменьшении - уменьшается (монотонная функция);
2.13.3 тормозную силу можно легко регулировать с достаточной точностью.
2.14 поэтапное торможение (phased braking): Способ торможения, который может быть применен, когда два или более источника торможения активизируются одним органом управления, причем эти источники активизируются один за другим по мере перемещения органа управления.
2.15 тормозная система длительного действия (endurance braking system): Дополнительная тормозная система, способная осуществлять и поддерживать в течение длительного времени торможение без существенного уменьшения его эффективности.
Примечание - Термин «тормозная система длительного действия» охватывает такую систему целиком, включая управляющий привод.
2.15.1 Тормозная система длительного действия может представлять собой единое устройство или совокупность нескольких устройств. Каждое такое устройство может иметь собственный орган управления.
2.15.2 Разновидности тормозных систем длительного действия в зависимости от особенностей их органов управления:
2.15.2.1 независимая тормозная система длительного действия (independent endurance braking system): Тормозная система длительного действия, имеющая отдельный орган управления, не связанный с органами управления других тормозных систем.
2.15.2.2 встроенная тормозная система длительного действия (integrated endurance braking system): Тормозная система длительного действия, орган управления которой совмещен с органом управления рабочей тормозной системы таким образом, что обе тормозные системы приводятся в действие одновременно или поэтапно по мере перемещения общего органа управления.
2.15.2.3 комбинированная тормозная система длительного действия (combined endurance braking system): Встроенная тормозная система длительного действия, характеризующаяся тем, что общий орган управления, воздействующий на эту тормозную систему, дополнительно оборудован отключающим устройством, позволяющим органу управления воздействовать только на рабочую тормозную систему.
2.16 груженое транспортное средство (laden vehicle): Транспортное средство, нагруженное до состояния максимальной массы (см. 2.17).
2.17 максимальная масса (maximum mass): Технически допустимая максимальная масса, заявленная изготовителем транспортного средства и могущая превышать максимально допустимую массу, установленную национальным законодательством.
2.18 распределение массы по осям (the distribution of mass among the axles): Распределение воздействия силы тяжести на массу транспортного средства по осям транспортного средства и/или распределение составляющих этой массы по осям транспортного средства.
2.19 нагрузка на колесо/ось (wheel/axle load): Вертикальная статическая реакция (сила воздействия) дорожной поверхности на колесо транспортного средства/колеса оси транспортного средства в зоне контакта.
2.20 максимальная статическая нагрузка на колесо/ось (maximum stationary wheel/axle load): Статическая нагрузка на колесо/ось груженого транспортного средства.
2.21 электрическая рекуперативная тормозная система (electric regenerative braking): Тормозная система, которая в процессе замедления осуществляет преобразование кинетической энергии транспортного средства в электрическую.
2.21.1 орган управления электрической рекуперативной тормозной системы (electric regenerative braking control): Устройство, модулирующее действие электрической рекуперативной тормозной системы.
2.21.2 электрическая рекуперативная тормозная система категории A (electric regenerative braking system of category А): Электрическая рекуперативная тормозная система, не являющаяся частью рабочей тормозной системы.
2.21.3 электрическая рекуперативная тормозная система категории В (electric regenerative braking system of category В): Электрическая рекуперативная тормозная система, являющаяся частью рабочей тормозной системы.
2.21.4 уровень электрического заряда (electric state of charge): Текущее значение отношения реального количества электрической энергии, аккумулированного в тяговой батарее, к максимальному количеству электрической энергии, которое может быть в ней аккумулировано.
2.21.5 тяговая батарея (traction battery): Комплект аккумуляторов, накапливающих электрическую энергию, предназначенную для питания тягового двигателя (двигателей) транспортного средства.
2.22 гидравлическая тормозная система с аккумулятором энергии (hydraulic braking system with stored energy): Тормозная система, в которой энергия передается жидкостью, находящейся под давлением в одном или нескольких аккумуляторах, куда она подается одним или несколькими нагнетательными насосами, каждый из которых оснащен устройствами, ограничивающими давление таким образом, чтобы не было превышено его установленное максимальное значение, определяемое изготовителем.
2.23 одновременная блокировка передних и задних колес (simultaneous lockup of the front and rear wheels): Ситуация, когда временной интервал между начальным моментом блокировки последнего (второго) колеса задней оси и начальным моментом блокировки последнего (второго) колеса передней оси составляет менее 0,1 с.
2.24 электрическая управляющая магистраль (electric control line): Электрическая цепь, соединяющая тягач и прицеп, управляющая торможением прицепа и включающая в себя электрический кабель, электрический разъем, а также элементы, служащие для передачи информации и для электропитания управляющего привода тормозов прицепа.
2.25 передача информации (data communication): Передача оцифрованной информации в соответствии с протоколом.
2.26 двухточечная связь (point-to-point): Топология электрической сети, предусматривающая попарное соединение объектов, каждый из которых имеет встроенный согласующий резистор, подключенный к линии связи.
2.27 регулятор усилия в сцепном устройстве (coupling force control): Система/функция, автоматически уравнивающая удельные тормозные силы тягача и прицепа.
2.28 номинальное значение (nominal value): Значение из совокупности номинальных значений, требуемых для описания эффективности торможения и необходимых для установления передаточной функции тормозной системы путем сопоставления параметров на выходе и на входе одиночных транспортных средств и их комбинации.
2.28.1 Для механического транспортного средства номинальное значение - характеристика, которая соотносит удельную тормозную силу этого транспортного средства с уровнем входного воздействия на тормозную систему и может быть подтверждена испытанием.
2.28.2 Для прицепа номинальное значение - характеристика, которая соотносит удельную тормозную силу с сигналом, поступающим от сцепного устройства, и может быть подтверждена испытанием.
2.28.3 номинальное требуемое значение (nominal demand value): Для регулятора усилия в сцепном устройстве - характеристика, которая соотносит сигнал, поступающий от сцепного устройства, с удельной тормозной силой и которая должна находиться в пределах совместимости (см. приложение К) и может быть подтверждена испытанием.
2.29 торможение, управляемое автоматически (automatically commanded braking): Одна из функций комплексной электронной системы управления, заключающаяся в активизации тормозной системы (тормозных систем) отдельных осей транспортного средства для замедления его движения.
Примечание - Активизация происходит в результате автоматической обработки первичной бортовой информации транспортного средства при наличии или отсутствии непосредственного воздействия со стороны водителя.
2.30 выборочное торможение (selective braking): Одна из функций комплексной электронной системы управления, заключающаяся в активизации отдельных тормозов с помощью автоматических устройств, при этом замедление движения является частью общего изменения характера движения транспортного средства.
2.31 исходные тормозные силы (reference braking forces): Тормозные силы, возникающие на поверхностях шин одной оси на роликовом испытательном стенде, сопоставленные с давлением в тормозной камере (камерах) или тормозном цилиндре (цилиндрах), значения которых должны быть декларированы изготовителем к моменту начала испытаний на соответствие настоящему стандарту.
2.32 сигнал торможения (braking signal): Логический сигнал, информирующий об активизации тормоза в соответствии с 5.2.1.30.
2.33 сигнал аварийного торможения (emergency braking signal): Логический сигнал, информирующий об активизации аварийного тормоза в соответствии с 5.2.1.31.
3 Заявка на проведение испытаний
3.1 Заявку на проведение испытаний ТС в отношении торможения представляет предприятие-изготовитель или его полномочный представитель.
3.2 К заявке прилагают нижеперечисленные документы в трех экземплярах и следующие данные:
3.2.1 описание типа ТС в соответствии с 2.2. Необходимо указать цифры и символы, идентифицирующие тип ТС и, в случае механического ТС, - тип двигателя;
3.2.2 перечень надлежащим образом идентифицированных элементов, составляющих тормозную систему;
3.2.3 схему тормозной системы в сборе и идентификацию расположения на ТС элементов, ее составляющих;
3.2.4 детальные чертежи всех элементов тормозной системы, позволяющие легко определить их местонахождение и идентифицировать.
3.3 ТС, представляющее тип ТС, подлежащий испытаниям, должно быть представлено испытательной лаборатории, уполномоченной проводить такие испытания.
4 Оформление протокола испытаний
4.1 Если ТС, представленное на испытания в соответствии с настоящим стандартом, удовлетворяет требованиям разделов 5 и 6, то на данный тип ТС оформляют соответствующий протокол испытаний.
4.2 Протокол испытаний должен включать в себя (в качестве приложения) краткое изложение содержания документов, перечисленных в 3.2.1 - 3.2.4, по форме, приведенной в приложении Б, представляемое предприятием, подавшим заявку на проведение испытаний. Если к заявке прилагают чертежи, то их формат должен быть А4 (210×297 мм) или кратный ему.
4.3 Один и тот же протокол испытаний не может быть выдан на тот же тип ТС, но оборудованный тормозной системой другого типа, или на другой тип ТС.
5 Технические требования
В качестве альтернативы требованиям, изложенным в настоящем разделе, предприятия - изготовители ТС, выпускающие в обращение на рынок Российской Федерации более 20 000 ТС в год, могут получать протокол испытаний на соответствие техническим требованиям, указанным в Директиве ЕС 71/320 «Тормозные системы механических транспортных средств и их прицепов некоторых категорий» 1), последнее изменение которой принято директивой ЕС 2002/78 2).
_______________
1) Опубликовано в Official Journal № L202 от 06.09.71 и № L73 от 27.03.72.
2) Опубликовано в Official Journal № L267/23 от 04.10.2002.
5.1 Общие положения
5.1.1 Тормозная система
5.1.1.1 Тормозная система должна быть спроектирована, изготовлена и установлена таким образом, чтобы при нормальной эксплуатации, несмотря на вибрации, которым она может быть при этом подвергнута, соответствовать требованиям настоящего стандарта.
5.1.1.2 В частности, тормозная система должна быть спроектирована, изготовлена и установлена таким образом, чтобы быть способной противостоять коррозии и старению.
5.1.1.3 Тормозные колодки не должны содержать асбест.
5.1.1.4 Эффективность тормозных систем, включающих в себя электрические управляющие магистрали, не должна снижаться под воздействием магнитных или электрических полей. Это требование должно быть подтверждено демонстрацией соответствия требованиям ГОСТ Р 41.10.
5.1.1.5 Сигнал о наличии неисправности может на короткое время (менее 10 мс) прервать сигнал запроса в управляющем приводе при условии, что это не снизит эффективность торможения.
5.1.2 Функции тормозной системы
5.1.2.1 Рабочая тормозная система должна обеспечивать:
- управление движением ТС и его быструю, безопасную и эффективную остановку вне зависимости от скорости и массы ТС при любом угле уклона или подъема;
- плавное изменение действия тормозов.
Водитель должен иметь возможность осуществлять такое торможение со своего рабочего места, не снимая рук с органа рулевого управления. При выполнении вышеперечисленных требований в рабочей тормозной системе не должно возникать одновременно более одного отказа.
5.1.2.2 Запасная тормозная система
Запасная тормозная система должна обеспечивать:
- остановку ТС на достаточно коротком расстоянии в случае отказа рабочей тормозной системы;
- плавное изменение действия тормозов.
Водитель должен иметь возможность осуществлять такое торможение со своего рабочего места, удерживая по крайней мере одну руку на органе рулевого управления. При выполнении вышеперечисленных требований в запасной тормозной системе не должно возникать одновременно более одного отказа.
5.1.2.3 Стояночная тормозная система
Стояночная тормозная система должна удерживать ТС в неподвижном состоянии на подъеме и уклоне даже в отсутствие водителя. При этом положение рабочих частей должно быть зафиксировано с помощью чисто механического устройства.
Водитель должен иметь возможность активизировать стояночную тормозную систему со своего рабочего места. В случае прицепа должны быть выполнены требования 5.2.2.10. Допускается одновременная активизация пневматической тормозной системы прицепа и стояночной тормозной системы тягача при условии, что водитель имеет возможность в любой момент времени убедиться в достаточной эффективности стояночного торможения комбинации ТС (автопоезда) благодаря чисто механическому действию стояночной тормозной системы.
5.1.3 Соединения между пневматическими тормозными системами механических транспортных средств и прицепов
5.1.3.1 Между пневматическими тормозными системами механических ТС и прицепов должны быть следующие соединения:
5.1.3.1.1 одна пневматическая питающая магистраль и одна пневматическая управляющая магистраль или
5.1.3.1.2 одна пневматическая питающая магистраль, одна пневматическая управляющая магистраль и одна управляющая электрическая магистраль, или
5.1.3.1.3 одна пневматическая питающая магистраль и одна управляющая электрическая магистраль 1).
_____________
1) До принятия соответствующих нормативных документов, обеспечивающих совместимость и безопасность, использование соединений между тягачом и прицепом, описанных в 5.1.3.1.3, не допускается.
5.1.3.2 Электрическая управляющая магистраль механического ТС должна выдавать информацию о том, способна ли она выполнять требования 5.2.1.18.2 без поддержки со стороны пневматической управляющей магистрали. Она должна также выдавать информацию о том, оборудовано ли механическое ТС в соответствии с 5.1.3.1.2 двумя управляющими магистралями или, в соответствии с 5.1.3.1.3, только электрической управляющей магистралью.
5.1.3.3 Механическое ТС, оборудованное в соответствии с 5.1.3.1.3, должно распознавать несовместимость с ним соединительного устройства прицепа, оборудованного в соответствии с 5.1.3.1.1. Когда происходит электрическое соединение таких ТС с подключением электрической управляющей магистрали тягача, красный предупреждающий оптический сигнал, соответствующий требованиям 5.2.1.29.1.1, должен информировать водителя об этом, и, когда в систему начинается подача питания, тормоза тягача должны автоматически приводиться в действие. Такое действие тормозов должно быть не менее эффективным, чем действие стояночной тормозной системы, требуемое в соответствии с В.2.3.1 (приложение В).
5.1.3.4 При осуществлении электрического соединения механического ТС, оборудованного двумя управляющими магистралями в соответствии с 5.1.3.1.2, с прицепом, также оборудованным двумя управляющими магистралями, должны быть выполнены следующие требования:
5.1.3.4.1 Оба управляющих сигнала должны быть выведены на соединительную головку, и прицеп должен использовать электрический управляющий сигнал, если только этот сигнал не воспринимается как ошибочный. В последнем случае прицеп должен автоматически переключиться на пневматическую управляющую магистраль.
5.1.3.4.2 Каждое ТС должно соответствовать требованиям приложения К, относящимся к электрическим и пневматическим управляющим магистралям.
5.1.3.4.3 Если электрический управляющий сигнал в течение более чем 1 с превышает сигнал, эквивалентный давлению 1 бар, прицеп должен проверить наличие пневматического управляющего сигнала, и, если такой сигнал отсутствует, водитель должен получить предупреждение от прицепа в виде включающегося отдельного желтого предупреждающего сигнала, соответствующего требованиям 5.2.1.29.2.
5.1.3.5 Допускается оборудовать прицеп в соответствии с 5.1.3.1.3 при условии, что он используется только совместно с механическим ТС, оборудованным электрической управляющей магистралью, соответствующей требованиям 5.2.1.18.2. Во всех других случаях на прицепе при электрическом соединении с тягачом должны автоматически активизироваться тормоза, или же ранее активизированные тормоза должны оставаться в этом состоянии. Водитель должен быть предупрежден о затормаживании прицепа отдельным желтым предупреждающим сигналом, соответствующим требованиям 5.2.1.29.2.
5.1.3.6 Электрическая управляющая магистраль должна удовлетворять требованиям международных стандартов ИСО 11992-1 [1] и ИСО 11992-2 [2] и представлять собой двухточечное соединение через 7-штырьковый соединитель, соответствующий международному стандарту ИСО 7638-1 [3] или ИСО 7638-2 [4]. Контакты, предназначенные для передачи данных в соединителе, соответствующем [3] или [4], должны быть использованы для информации, касающейся только функционирования тормозной системы, включая антиблокировочную систему (далее - АБС), и ходовой части (рулевого управления, шин и подвески) в соответствии с [2]. Обеспечение функционирования тормозной системы имеет приоритет как в нормальном режиме, так и при наличии неисправностей. Передача информации о работе ходовой части не должна приводить к задержкам функционирования тормозной системы. Передача энергии, обеспечиваемая соединителем, соответствующим [3] или [4], должна осуществляться исключительно для функционирования тормозной системы и ходовой части и для передачи информации, касающейся прицепа, которая не передается по электрической управляющей магистрали. Во всех случаях должны быть выполнены требования 5.2.2.18. Подача энергии для выполнения других функций должна быть обеспечена иными средствами.
5.1.3.6.1 Функциональная совместимость буксируемого и буксирующего ТС, оборудованных электрическими управляющими магистралями, описанными выше, должна быть подтверждена в процессе испытаний путем проверки выполнения соответствующих требований [1] и [2]. В приложении Т приведен пример такого испытания.
5.1.3.6.2 Если механическое ТС оборудовано электрической управляющей магистралью, соединяемой с электрической управляющей магистралью прицепа, то при соединении этих ТС между собой посредством такой магистрали неисправность в указанной магистрали, продолжающаяся более 40 мс, должна быть выявлена оборудованием механического ТС, и водитель должен быть проинформирован об этом желтым предупреждающим сигналом, соответствующим требованиям 5.2.1.29.1.2.
5.1.3.7 Если тормозная система прицепа приводится в действие стояночной тормозной системой механического ТС, что допускает 5.1.2.3, должны быть выполнены следующие дополнительные требования:
5.1.3.7.1 Если механическое ТС оборудовано в соответствии с 5.1.3.1.1, активизация стояночной тормозной системы механического ТС должна через пневматическую управляющую магистраль активизировать тормозную систему прицепа.
5.1.3.7.2 Если механическое ТС оборудовано в соответствии с 5.1.3.1.2, активизация стояночной тормозной системы механического ТС должна активизировать тормозную систему прицепа в соответствии с 5.1.3.7.1. Дополнительно допускается также активизация стояночной тормозной системы прицепа через электрическую управляющую магистраль.
5.1.3.7.3 Если механическое ТС оборудовано в соответствии с 5.1.3.1.3 или если оно удовлетворяет требованиям 5.2.1.18.2 без участия пневматической управляющей магистрали (см. 5.1.3.1.2), активизация стояночной тормозной системы механического ТС должна вызвать активизацию тормозной системы прицепа через электрическую управляющую магистраль. Отключение электропитания тормозной системы механического ТС должно вызывать торможение прицепа. Такое торможение осуществляется перекрытием питающей магистрали (при этом пневматическая управляющая магистраль может оставаться под давлением). Питающая магистраль может оставаться в отключенном состоянии только до момента восстановления электропитания пневматической тормозной системы механического ТС, и одновременно с этим должно восстановиться торможение прицепа, вызванное электрической управляющей магистралью.
5.1.3.8 Запорные (перекрывающие) устройства, которые не могут быть активизированы автоматически, не допускаются. В случае сочлененного ТС эластичные шланги и кабели должны быть составными частями тягача. В других случаях эластичные шланги и кабели должны быть составными частями прицепа.
5.1.4 Требования к периодическому техническому обслуживанию тормозных систем
5.1.4.1 Необходимо обеспечить доступ к элементам рабочих тормозов, подверженным износу, а именно фрикционным колодкам и барабанам/дискам для непосредственного определения степени и характера износа (в случае барабанов и дисков такой доступ следует осуществлять не только в процессе периодических технических осмотров). Методы, которыми этот доступ может быть осуществлен, описаны в 5.2.1.11.2 и 5.2.2.8.2.
5.1.4.2 Для определения реально действующих тормозных сил на каждой оси ТС, имеющего пневматическую тормозную систему, необходимо предусмотреть наличие в тормозной системе контрольных штуцеров, которые должны полностью соответствовать требованиям раздела 4 международного стандарта ИСО 3583 [5] и быть размещены:
5.1.4.2.1 в каждом независимом контуре в доступном месте, наиболее близком к тому тормозному цилиндру, который смонтирован в наименее благоприятном месте в отношении выполнения требований к времени реакции, установленных в приложении Д;
5.1.4.2.2 в тормозной системе, включающей в себя устройство для изменения давления, описанное в К.7.2 (приложение К), а именно в пневматической магистрали перед этим устройством и за ним в наиболее близких к этому устройству и доступных местах. Если это устройство имеет пневматическое управление, необходим дополнительный контрольный штуцер для моделирования условий нагружения. Если такое устройство не предусмотрено, должен быть установлен один контрольный штуцер, аналогичный упомянутому выше штуцеру, расположенному за устройством для изменения давления. Контрольные штуцеры должны быть установлены так, чтобы быть легко доступными со стороны дорожного полотна или из ТС;
5.1.4.2.3 в доступном месте, наиболее близком к аккумулятору энергии, наименее благоприятно расположенному в отношении выполнения требований Е.1.2.4 (приложение Е);
5.1.4.2.4 в каждом независимом контуре тормозной системы, так чтобы была возможность проконтролировать давление на входе в магистраль тормозного привода и на выходе из нее.
5.1.4.2.5 Контрольные штуцеры должны удовлетворять требованиям раздела 4 международного стандарта [5].
5.1.4.3 Доступ к контрольным штуцерам не должен быть прегражден в результате модификации и изменения конструкции комплектующих элементов или кузова (кабины) ТС.
5.1.4.4 Необходимо обеспечить генерирование максимальных тормозных сил в статических условиях на барабанном или роликовом тормозном стенде.
5.1.4.5 Сведения о тормозных системах
5.1.4.5.1 Сведения о пневматической тормозной системе, необходимые для испытаний ее функционирования и эффективности, должны быть нанесены на видном месте ТС и быть нестираемыми, или же свободный доступ к ним должен быть обеспечен другим способом (например, размещением соответствующей информации в руководстве по эксплуатации, на электронном носителе и т.п.).
5.1.4.5.1 Для ТС, оборудованных пневматическими тормозными системами, требуются, как минимум, следующие сведения:
Характеристики элементов пневматической системы
|
Элемент пневматической системы |
Характеристика |
Значение |
|
Нагнетательный / стравливающий клапан 1) |
Максимальное давление выключения, бар |
|
|
Минимальное давление включения, бар |
|
|
|
Четырехконтурный защитный клапан |
Статическое давление закрытия, бар |
|
|
Контрольный клапан прицепа или аварийный клапан защиты 2) в зависимости от конструкции |
Давление подачи, соответствующее контрольному давлению 1,5 бар |
|
|
Рабочая тормозная система |
Минимальное расчетное давление в рабочей тормозной системе 1), 3), бар |
|
|
1) Неприменимо для прицепов. 2) Неприменимо для ТС с электронным управлением тормозными системами. 3) В случае отличия от минимального давления включения. |
||
Характеристики колесных тормозных цилиндров 1)
__________
1) Только для прицепов.
|
Характеристика цилиндра |
Порядковый номер оси |
||
|
1 |
2 |
3 |
|
|
Тип тормозного цилиндра (рабочего/стояночного) |
/ |
/ |
/ |
|
Максимальный ход smax, мм |
|
|
|
|
Плечо рычага, мм |
|
|
|
5.1.4.6 Исходные тормозные силы
5.1.4.6.1 Для ТС с пневматическими тормозными системами исходные тормозные силы должны быть определены на роликовом тормозном стенде.
5.1.4.6.2 Исходные тормозные силы должны быть определены в диапазоне значений давления в исполнительном устройстве от 1 бар до значения, создаваемого в испытании «Тип-0», на каждой оси. В заявке на проведение испытаний на соответствие настоящему стандарту должны быть указаны исходные тормозные силы для диапазона значений давления в тормозной камере от давления, равного 1 бар, до давления, развиваемого в испытании «Тип-0» для каждой оси. Заявитель должен указать исходные тормозные силы для рабочего диапазона давлений в исполнительном устройстве (тормозной камере или тормозном цилиндре) начиная от давления 1 бар. Изготовитель ТС должен обеспечить доступность этих сведений в соответствии с 5.1.4.5.1.
5.1.4.6.3 Декларированные исходные тормозные силы должны быть такими, чтобы ТС обеспечивало удельную тормозную силу, эквивалентную установленной в приложении В для соответствующего ТС (50 % для ТС категорий М2, М3, N2, N3, о3 и о4, за исключением полуприцепов, и 45 % для полуприцепов), во всех случаях, когда измеренная на роликовом стенде тормозная сила на каждой оси независимо от нагрузки имеет значение не меньшее, чем исходная тормозная сила, соответствующая заданному давлению в исполнительном устройстве в пределах объявленного диапазона рабочих давлений 2).
____________
2) Для прохождения периодического технического осмотра может потребоваться регулировка минимальных значений суммарной удельной тормозной силы ТС для приведения их в соответствие с национальными или международными требованиями.
5.1.4.7 Необходимо предусмотреть возможность простым способом проверить правильность функционирования комплексных электронных систем, управляющих торможением. Если для этого необходима специальная информация, то она должна быть в свободном доступе.
5.1.4.7.1 В процессе работ по проведению испытаний на соответствие настоящему стандарту необходимо в конфиденциальном порядке информировать о средствах защиты от простого несанкционированного изменения режима работы средств проверки, выбранных изготовителем (например, предупреждающего сигнала).
В противном случае следует считать, что требование о наличии средств защиты выполняется, когда имеются дополнительные средства проверки правильности работы таких систем.
5.1.5 Требования приложения У должны быть применены к характеристикам безопасности всех комплексных электронных систем управления ТС, которые создают или формируют часть управляющего привода, воздействующего на тормозную функцию, включая те электронные системы, которые используют тормозную систему (системы) для автоматического или выборочного торможения.
Однако системы или функции, использующие тормозную систему в качестве средства решения задач более высокого уровня, должны соответствовать требованиям приложения У только в той мере, в которой эти системы или функции непосредственно воздействуют на тормозную систему. При наличии такие системы не должны отключаться при испытаниях тормозной системы на соответствие настоящему стандарту.
5.2 Характеристики тормозных систем
5.2.1 Тормозные системы транспортных средств категорий М и N
5.2.1.1 Комплект тормозных систем, которыми оборудуют ТС, должен удовлетворять требованиям к рабочим, запасным и стояночным тормозным системам, рассматриваемым ниже.
5.2.1.2 Системы, осуществляющие рабочее, запасное и стояночное торможение, могут иметь общие элементы при условии, что они соответствуют следующим требованиям:
5.2.1.2.1 Должны быть, по крайней мере, два органа управления, независимые один от другого и легкодоступные для водителя, находящегося в нормальном рабочем положении.
Для ТС всех категорий, за исключением М2 и М3, каждый орган управления (исключая орган управления тормозной системы длительного действия) должен быть сконструирован так, чтобы он после снятия усилия возвращался в положение полного отсутствия управляющего воздействия. Это требование не распространяется на орган управления стояночным тормозом (или соответствующую часть совмещенного органа управления), если он механически фиксируется в положении, соответствующем воздействию на тормоз.
5.2.1.2.2 Орган управления рабочей тормозной системы должен быть независимым от органа управления стояночной тормозной системы.
5.2.1.2.3 Если рабочая тормозная система и запасная тормозная система имеют общий орган управления, работоспособность механических соединений между этим органом и другими элементами тормозных приводов не должна ухудшаться в течение установленного периода эксплуатации.
5.2.1.2.4 Если рабочая тормозная система и запасная тормозная система имеют общий орган управления, то стояночная тормозная система должна быть сконструирована так, чтобы ее можно было бы привести в действие в процессе движения ТС. Это требование неприменимо, если рабочей тормозной системой можно управлять, хотя бы частично, с помощью вспомогательного органа управления.
5.2.1.2.5 Без ущерба для выполнения требований 5.1.2.3 рабочая тормозная система и стояночная тормозная система могут использовать общие элементы в своем приводе (приводах) при условии, что в случае отказа в любом элементе привода (приводов) продолжается выполнение требований, предъявляемых к запасной тормозной системе.
5.2.1.2.6 В случае неисправности любого элемента иного, чем тормоз (см. 2.6), или элементов, перечисленных в 5.2.1.2.8, или в случае любой другой неисправности в рабочей тормозной системе (нарушения нормальной работы, частичного или полного израсходования энергии из аккумулятора энергии) запасная тормозная система или часть рабочей тормозной системы, на которую не повлияла неисправность, должна быть способна остановить ТС, выполняя требования, установленные для запасного торможения.
5.2.1.2.7 В частности, когда запасная тормозная система и рабочая тормозная система имеют общий орган управления и общий тормозной привод:
5.2.1.2.7.1 если рабочее торможение осуществляется использованием мускульной энергии водителя, дополненной энергией из одного или более аккумулятора, запасное торможение должно, в случае неисправности источника этой дополнительной энергии, быть обеспечено мускульной энергией водителя, дополненной энергией из аккумуляторов, на которые неисправность не распространилась (если таковые остались), при этом значение усилия, приложенного к органу управления, не должно превышать установленного максимального значения;
5.2.1.2.7.2 если рабочее торможение и управление им осуществляются исключительно контролируемой водителем подачей энергии из аккумулятора, то должно быть не менее двух полностью независимых аккумуляторов энергии, каждый из которых имеет свой собственный независимый тормозной привод, при этом каждый из этих приводов может воздействовать на тормоза двух и более колес, выбранных таким образом, чтобы эти колеса осуществляли запасное торможение с установленной эффективностью, не вызывая опасного нарушения устойчивости ТС. Кроме того, каждый из упомянутых аккумуляторов энергии должен быть оборудован предупреждающим устройством, соответствующим 5.2.1.13. В каждом контуре рабочей тормозной системы по меньшей мере в одном резервуаре сжатого воздуха необходимо предусмотреть устройство для дренажа и опорожнения, расположенное в надлежащем и легкодоступном месте;
5.2.1.2.7.3 если рабочее торможение и управление им зависят исключительно от использования аккумулятора энергии, может оказаться достаточным наличие одного аккумулятора энергии, предназначенного для тормозного привода, при условии, что запасное торможение с предписанной эффективностью обеспечивается мускульной энергией водителя при его воздействии на орган управления рабочей тормозной системы, а также выполняются требования 5.2.1.6.
5.2.1.2.8 Определенные детали, такие как педаль и ее шарниры, главный цилиндр и его плунжер или плунжеры (в гидравлических системах), управляющий клапан (в гидравлических и/или пневматических системах), механические соединения между педалью и главным цилиндром или управляющим клапаном (краном), тормозные цилиндры и их плунжеры (в гидравлических и/или пневматических системах), разжимные кулачки тормозов с рычагами считают не подверженными поломкам, если они сконструированы с большим запасом прочности, легкодоступны для монтажа и демонстрируют показатели безопасности, по меньшей мере эквивалентные установленным для других жизненно важных элементов ТС (таких как рычаги и тяги рулевого управления). Каждая из перечисленных деталей, неисправность которой привела бы к невозможности торможения ТС с эффективностью не меньшей, чем установленная для запасной тормозной системы, должна быть изготовлена из металла или иного материала с эквивалентными характеристиками и не должна деформироваться при нормальных условиях эксплуатации тормозных систем.
5.2.1.3 Если на ТС имеются отдельные органы управления рабочей тормозной системы и запасной тормозной системы, одновременное воздействие на оба органа не должно приводить в нерабочее состояние сразу обе эти тормозные системы как в случае их нормального рабочего состояния, так и при неисправности одной из них.
5.2.1.4 Рабочая тормозная система вне зависимости оттого, совмещена она с запасной тормозной системой или нет, должна быть сконструирована так, чтобы в случае неисправности в какой-либо части ее привода достаточное число колес ТС еще могло быть заторможено под воздействием органа управления запасной тормозной системы. Эти колеса должны быть выбраны так, чтобы остаточная эффективность рабочей тормозной системы соответствовала требованиям В.2.4 (приложение В).
5.2.1.4.1 Однако нижеперечисленные требования не должны быть применены к тягачам, предназначенным для буксирования полуприцепов, если привод рабочей тормозной системы полуприцепа независим от привода рабочей тормозной системы тягача.
5.2.1.4.2 Если в какой-либо части гидравлического тормозного привода появилась неисправность, водитель должен быть проинформирован о ней с помощью красного предупреждающего сигнала, как предписано в 5.2.1.29.1.1. В качестве альтернативы допускается использовать этот сигнал, когда уровень рабочей жидкости в резервуаре опускается ниже предела, установленного изготовителем.
5.2.1.5 В ТС, где для торможения используется энергия иная, чем мускульная энергия водителя, нет необходимости в более чем одном источнике подачи такой энергии (гидравлическом насосе, воздушном компрессоре и т.д.), однако средства управления устройством, образующим такой источник, должны быть настолько безопасными, насколько это практически возможно.
5.2.1.5.1 При неисправности в любой части тормозного привода должно продолжаться питание оставшихся неповрежденными элементов привода, если это необходимо для остановки ТС с эффективностью, предписанной для остаточного и/или запасного торможения. Это требование должно быть выполнено с помощью устройств, легко активизируемых на неподвижном ТС, или автоматических устройств.
5.2.1.5.2 Кроме того, аккумуляторы энергии, расположенные за этими устройствами (по направлению действия привода), в случае неисправности в энергоподающей магистрали должны после четырех полных воздействий на орган управления рабочей тормозной системы при условиях, оговоренных в Е.1.1.2, Е.2.1.2 и Е.3.1.2 (приложение Е), обеспечивать остановку ТС при пятом воздействии с эффективностью, предписанной для запасной тормозной системы.
5.2.1.5.3 В случае гидравлических тормозных систем с резервуаром (резервуарами) энергии эти требования считают выполненными при условии удовлетворения требований, установленных в Е.3.1.2.2 (приложение Е).
5.2.1.6 Требования 5.2.1.2, 5.2.1.4 и 5.2.1.5 должны быть выполнены без использования какого-либо автоматического устройства, неэффективность которого может остаться незамеченной из-за того, что его элементы предназначены для приведения в действие только в случае возникновения неисправности в тормозной системе.
5.2.1.7 Рабочая тормозная система должна воздействовать на все колеса ТС, и ее воздействие должно быть распределено надлежащим образом по осям ТС.
5.2.1.7.1 Если ТС имеет более двух осей, то во избежание блокировки колес или подгорания тормозных накладок тормозная сила на отдельных осях может быть автоматически уменьшена до нуля в случае передачи через эти оси существенно уменьшенных нагрузок при условии, что ТС соответствует всем требованиям по эффективности тормозов, установленным в приложении В.
5.2.1.7.2 В ТС категорий М1 и N1 с электрическими рекуперативными тормозными системами категории В тормозной импульс от других источников торможения может быть соответствующим образом сдвинут по фазе, чтобы позволить действовать только электрической рекуперативной тормозной системе при условии выполнения одновременно следующих требований:
5.2.1.7.2.1 Внутренние изменения тормозного момента в электрической рекуперативной тормозной системе (например, в результате изменений электрических характеристик тяговых аккумуляторных батарей) должны автоматически компенсироваться соответствующим изменением сдвигов по фазе при условии, что одновременно выполняется одно из следующих требований1):
- требования В.1.3.2 (приложение В) или
- требования Н.5.3 (приложение Н), в том числе случай, когда включен электродвигатель.
5.2.1.7.2.2 В случае необходимости 1), для того чтобы и далее было обеспечено соответствие фактического значения удельной тормозной силы ожиданиям водителя с учетом реально достижимого сцепления шин с дорожным покрытием, торможение должно автоматически распространяться на все колеса ТС.
__________
1) Испытательная лаборатория, проводящая испытания, должна иметь право проверки рабочей тормозной системы путем проведения дополнительных испытаний ТС.
5.2.1.8 Воздействие рабочей тормозной системы должно быть распределено по колесам одной оси симметрично продольной плоскости симметрии ТС. Наличие систем компенсации и иных устройств (например, АБС), которые могут нарушить симметрию распределения, необходимо декларировать.
5.2.1.8.1 Водитель должен быть проинформирован желтым предупреждающим сигналом, требования к которому установлены в 5.2.1.29.1.2, о том, что в тормозной системе имеет место износили неисправность, компенсируемая с помощью электрического управляющего привода. Это требование должно быть выполнено при всех условиях нагружения, если отклонения, которые необходимо компенсировать, превышают следующие предельные значения:
5.2.1.8.1.1 для компенсации разности давлений в тормозных приводах левой и правой сторон на каждой оси:
а) 25 % наибольшего значения давления при замедлении ТС не менее 2 м/с2;
б) значение, соответствующее 25 % значения давления для замедления, равного 2 м/с2, при замедлении менее 2 м/с2;
5.2.1.8.1.2 для индивидуальной компенсации давления на каждой оси:
а) более 50 % номинального значения давления при замедлении ТС не менее 2 м/с2;
б) значение, соответствующее 50% номинального значения давления при замедлении, равном 2 м/с2, при замедлении менее 2 м/с2.
5.2.1.8.2 Компенсация, установленная выше, допускается только при условии, что первичное приведение в действие тормозов осуществляется при скоростях ТС, превышающих 10 км/ч.
5.2.1.9 Неисправности в электрическом тормозном приводе не должны вызывать торможение ТС, если это противоречит намерениям водителя.
5.2.1.10 Рабочая, запасная и стояночная тормозные системы должны воздействовать на трущиеся поверхности тормозов, связанные с колесами, через элементы, обладающие достаточной прочностью.
Если тормозной момент на конкретной оси или осях генерируется как фрикционной тормозной системой, так и электрической рекуперативной тормозной системой категории В, допускается отключение электрической системы при условии, что источник фрикционного торможения продолжает действовать и способен осуществлять компенсацию, установленную в 5.2.1.7.2.1.
В случае кратковременных переходных режимов, связанных с отключением электрической тормозной системы, допускается неполная компенсация, однако за отрезок времени, не превышающий 1 с, эта компенсация должна достигать не менее 75 % своего конечного значения.
Тем не менее, во всех случаях постоянно подсоединенный источник фрикционного торможения должен обеспечивать продолжение функционирования рабочей и запасной тормозных систем с установленной степенью эффективности.
Размыкание рабочих поверхностей стояночной тормозной системы допускается только при условии, что этим размыканием управляет водитель со своего рабочего места с помощью системы, исключающей возможность приведения ее в действие при разгерметизации.
5.2.1.11 Износ тормозов должен быть легкоустранимым с помощью системы ручной или автоматической регулировки. При этом орган управления и элементы тормозного привода должны сохранять возможность перемещения и, если необходимо, должны быть предусмотрены соответствующие компенсирующие устройства, позволяющие при нагреве тормозов или при достижении тормозными накладками определенной степени износа обеспечивать эффективное торможение без возникновения необходимости немедленной регулировки.
5.2.1.11.1 Регулировка износа рабочих тормозов должна осуществляться автоматически. Однако установка устройств автоматической регулировки тормозов не является обязательным требованием для внедорожных ТС категорий N2 и N3 и для тормозов задних колес ТС категорий М1 и N1.
Тормоза, оборудованные устройствами автоматической регулировки, должны после следующих друг за другом циклов нагрева и охлаждения обеспечивать свободное качение ТС, как определено в В.1.5.4 (приложение В) за пунктами, устанавливающими требования к испытаниям «Тип-1».
5.2.1.11.2 Проверка на износ фрикционных элементов рабочего тормоза
5.2.1.11.2.1 Должен быть обеспечен легкий доступ к рабочему тормозу для проверки на износ тормозных накладок снаружи ТС или со стороны дорожного полотна, например через предусмотренные конструкцией отверстия или какие-либо другие устройства, с использованием исключительно инструментов и приспособлений, входящих в штатную комплектацию ТС. Вместо этого допускается комплектовать ТС акустическим или оптическим устройством, предупреждающим водителя, находящегося на своем рабочем месте, о необходимости замены тормозных накладок. В качестве оптического предупреждающего сигнала допускается использовать желтый предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.2.2.
5.2.1.11.2.2 Оценку степени износа рабочих поверхностей тормозных дисков и барабанов проводят только путем непосредственного измерения рабочих элементов, для чего может потребоваться частичная разборка. Поэтому для проведения испытаний на соответствие требованиям настоящего стандарта изготовитель ТС должен:
а) определить метод оценки износа рабочих поверхностей дисков и барабанов, включая степень требуемого демонтажа, а также необходимые для этого инструменты и процедуры;
б) подготовить информацию о максимально допустимом износе, при достижении которого необходима замена этих элементов.
Эта информация должна быть свободно доступна, например в инструкции по эксплуатации или на электронном носителе.
5.2.1.12 В тормозных системах с гидравлическим приводом должен быть обеспечен легкий доступ к наливным отверстиям резервуаров для рабочей жидкости, кроме того, емкости, содержащие запасной объем рабочей жидкости, должны быть сконструированы так, чтобы уровень жидкости можно было легко контролировать без необходимости открытия таких емкостей. Если это условие не выполняется, то необходимо предусмотреть красный предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.1, привлекающий внимание водителя к падению уровня жидкости в резервуаре, способному вызвать отказ тормозной системы. Тип жидкости, которую необходимо использовать в тормозной системе с гидравлическим приводом, должен быть идентифицирован символом, соответствующим рисунку 1 или 2 ГОСТ 29200. Этот символ должен быть размещен так, чтобы его было хорошо видно, быть нестираемым и находиться на расстоянии не более 100 мм от соответствующих наливных отверстий резервуаров для рабочей жидкости. Изготовитель может представить дополнительную информацию.
5.2.1.13 Предупреждающее устройство
5.2.1.13.1 Если предписанная эффективность запасного торможения ТС не может быть обеспечена запасной тормозной системой без использования энергии из аккумулятора энергии, то любое ТС, оборудованное рабочей тормозной системой, активизируемой энергией из аккумулятора энергии, должно быть укомплектовано в дополнение к указателю давления в системе предупреждающим устройством, расположенным рядом с ним. Это предупреждающее устройство должно подавать оптический или акустический сигнал, когда количество запасенной аккумулятором (аккумуляторами) энергии в любой части тормозной системы уменьшается до уровня, при котором без пополнения аккумулятора энергии и безотносительно к условиям загрузки ТС возможно при пятом воздействии на орган управления рабочей тормозной системы после четырех полных воздействий обеспечить торможение с эффективностью, предписанной для запасного торможения (при отсутствии отказов в приводе запасной тормозной системы и минимально допустимых зазорах в тормозах). Это предупреждающее устройство должно быть непосредственно и постоянно подсоединено к электрической цепи. Когда двигатель работает в нормальных условиях эксплуатации и при отсутствии неисправностей в тормозной системе, например в случае испытаний на соответствие требованиям настоящего стандарта, предупреждающее устройство не должно подавать никакого сигнала, за исключением периода времени, необходимого для заполнения аккумулятора (аккумуляторов) энергии после пуска двигателя. В качестве оптического предупреждающего сигнала должен быть использован красный предупреждающий сигнал, соответствующий требованиям 5.2.1.29.1.1.
5.2.1.13.1.1 Однако если ТС признают удовлетворяющим требованиям 5.2.1.5 только на основании его соответствия требованиям Е.3.1.2.2 (приложение Е), предупреждающее устройство должно, в дополнение к оптическому сигналу, подавать и акустический сигнал. Такие сигналы не обязательно должны включаться одновременно при условии, что каждый из них соответствует упомянутым выше требованиям и акустический сигнал не включается ранее оптического сигнала. В качестве предупреждающего оптического сигнала следует использовать красный предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.1.
5.2.1.13.1.2 Акустическое предупреждающее устройство может не включаться при применении ручного тормоза и/или (по выбору изготовителя), когда в случае автоматической трансмиссии селектор находится в положении «Park» («Стоянка»).
5.2.1.14 Без ущерба для выполнения требований 5.1.2.3 там, где вспомогательный источник энергии является существенным фактором функционирования тормозной системы, аккумулятор энергии должен быть таким, чтобы в случае остановки двигателя или неисправности устройств, служащих для управления источником энергии, обеспечить эффективность торможения, достаточную для полной остановки ТС в предписанных условиях. Кроме того, если мускульная энергия, приложенная водителем к стояночной тормозной системе, усиливается вспомогательным устройством, стояночная тормозная система должна быть активизирована и в случае отказа вспомогательного устройства. При этом, в случае необходимости, должен быть использован аккумулятор энергии, не применяемый для питания вспомогательного устройства при нормальном его функционировании. В качестве такого аккумулятора энергии допускается использовать аккумулятор энергии, предназначенный для запасной тормозной системы.
5.2.1.15 В случае механического ТС, которому официально разрешено буксирование прицепа, укомплектованного тормозами, управляемыми водителем буксирующего ТС, рабочая тормозная система буксирующего ТС должна быть оборудована устройством, сконструированным так, чтобы в случае неисправности тормозной системы прицепа или прерывания потока в питающей воздушной магистрали (или соединении другого типа, которое может быть применено) между буксирующим ТС и его прицепом еще оставалась возможность торможения буксирующего ТС с эффективностью, предписанной для запасного торможения. Такое устройство должно быть размещено исключительно на буксирующем ТС.
5.2.1.16 В пневматическое/гидравлическое вспомогательное оборудование подача энергии должна быть осуществлена таким образом, чтобы в процессе работы этого оборудования могли быть достигнуты предписанные значения замедления и чтобы даже в случае повреждения источника энергии работа вспомогательного оборудования не привела бы к истощению аккумуляторов энергии, питающих тормозные системы, ниже минимального уровня, обусловленного в 5.2.1.13.
5.2.1.17 Рабочая тормозная система прицепов категории 03 или 04 должна быть неразделенного или полуразделенного типа.
5.2.1.18 Если ТС официально допущено к буксированию прицепа категории 03 или 04, его тормозные системы должны удовлетворять следующим требованиям:
5.2.1.18.1 Активизация запасной тормозной системы буксирующего ТС должна также вызывать дозированное торможение буксируемого ТС.
5.2.1.18.2 В случае неисправности в рабочей тормозной системе буксирующего ТС, состоящей по меньшей мере из двух независимых частей, та ее часть (части), которая не затронута возникшей неисправностью, должна быть способна полностью или частично активизировать тормоза прицепа. Должно быть обеспечено дозирование этого действия тормозов. Если такое действие достигается с помощью клапана, который при нормальных условиях находится в неработающем состоянии, то этот клапан допускается использовать только при возможности легкой проверки водителем правильности его функционирования (без применения инструментов) либо изнутри кабины, либо снаружи.
5.2.1.18.3 В случае неисправности (например, разрыва или разгерметизации) в одной из пневматических соединительных магистралей, обрыва или дефекта в электрической управляющей магистрали для водителя должна сохраняться возможность полной или частичной активизации тормозов прицепа с помощью либо органа управления рабочей тормозной системы, либо органа управления запасной тормозной системы, либо органа управления стояночной тормозной системы, если только неисправность не вызывает автоматическое торможение прицепа с эффективностью, предписанной в В.3.3 (приложение В).
5.2.1.18.4 Автоматическое торможение, упомянутое в 5.2.1.18.3, считают совершившимся при выполнении следующих требований:
5.2.1.18.4.1 при полностью активизированном органе управления из числа упомянутых в 5.1.2.1.18.3 давление в питающей магистрали должно понизиться до 1,5 бар за последующие 2 с, кроме того, после освобождения органа управления давление в питающей магистрали должно восстановиться;
5.2.1.18.4.2 при падении давления в питающей магистрали с интенсивностью не менее 1 бар/с автоматическое торможение прицепа должно начаться до того, как давление в питающей магистрали понизится до 2 бар.
5.2.1.18.5 В случае неисправности в одной из управляющих магистралей, соединяющих два ТС, оборудованных в соответствии с требованиями 5.1.3.1.2, управляющая магистраль, оставшаяся исправной, должна автоматически обеспечить эффективность торможения, предписанную для прицепа в В.3.1 (приложение В).
5.2.1.19 В случае механического ТС, оборудованного для буксирования прицепа, укомплектованного электрической тормозной системой в соответствии с П.1.1 (приложение П), должны быть выполнены следующие требования:
5.2.1.19.1 Источники энергии (генератор и аккумуляторная батарея) тягача должны быть способны обеспечить необходимые параметры тока для питания электрической тормозной системы. При работе двигателя в режиме холостого хода с частотой вращения, рекомендованной изготовителем, и работающих электрических устройствах, установленных на ТС изготовителем в качестве штатного оборудования, напряжение в электрических цепях в период максимального потребления энергии электрической тормозной системой (характеризуемого силой тока 15 А) не должно падать ниже 9,6 В при измерении в соединении тягача и прицепа. Короткое замыкание в электрических цепях не должно возникать даже при перегрузках.
5.2.1.19.2 В случае неисправности в рабочей тормозной системе буксирующего ТС, состоящей по меньшей мере из двух независимых частей, ее часть или части, не затронутые возникшей неисправностью, должны быть способны полностью или частично активизировать тормоза прицепа.
5.2.1.19.3 Использование датчика сигнала торможения и его электрической цепи для активизации электрической тормозной системы допускается, только если активизирующая электрическая цепь соединена с сигналом торможения параллельно и имеющиеся датчик и электрическая цепь сигнала торможения способны выдерживать повышенную нагрузку.
5.2.1.20 В случае пневматической рабочей тормозной системы, состоящей из двух и более независимых секций, утечка из одной секции в другую, происходящая около органа управления или за ним по направлению потока, должна постоянно отводиться в атмосферу.
5.2.1.21 В случае механического ТС, официально допущенного к буксированию прицепа категории о3 или о4, рабочая тормозная система прицепа должна быть приводимой в действие совместно с рабочей, запасной или стояночной тормозной системой буксирующего ТС. Применение тормозов только прицепа допускается в случае автоматического приведения их в действие буксирующим ТС исключительно для стабилизации ТС.
5.2.1.22 Механические ТС категорий М2, М3, N2 и N3, имеющие не более четырех осей, должны быть оборудованы АБС категории 1 в соответствии с приложением Н.
5.2.1.23 Механические ТС категории М1 оборудованные запасными колесами временного пользования, должны соответствовать техническим требованиям приложения 3 к ГОСТ Р 41.64.
5.2.1.24 Механические ТС, официально допущенные к буксированию прицепа, оборудованного АБС, должны также быть оборудованы специальным электрическим соединителем, соответствующим [3] или [4] 1), для электрического управляющего привода и/или АБС прицепа.
___________
1) Этот соединитель может быть применен как в пяти-, так и семиштырьковой модификации.
5.2.1.25 Дополнительные требования для всех ТС категорий М1 М2, N1 а также категории N2 массой менее 5 т, оборудованных электрической рекуперативной тормозной системой
5.2.1.25.1 Дополнительные требования для ТС, оборудованных электрической рекуперативной тормозной системой категории А
5.2.1.25.1.1 Электрическая рекуперативная тормозная система ТС категорий М1 и N1 должна активизироваться исключительно акселератором и/или переводом селектора трансмиссии в нейтральное положение.
5.2.1.25.1.2 Кроме того, для всех ТС категории М2 и ТС категории N2 массой менее 5 т орган управления электрическими рекуперативными тормозами может быть выполнен в виде отдельного переключателя или рычага.
5.2.1.25.2 Дополнительные требования для ТС, оборудованных электрической рекуперативной тормозной системой категории В
5.2.1.25.2.1 Необходимо предусмотреть невозможность отключения, частичного или полного, любого элемента рабочей тормозной системы, кроме отключения с помощью автоматических устройств. Это не означает отступления от требований 5.2.1.10.
5.2.1.25.2.2 Рабочая тормозная система должна иметь только один орган управления.
5.2.1.25.2.3 Для ТС, оборудованных электрическими рекуперативными тормозными системами обеих категорий, должны быть выполнены все имеющие отношение к ТС этих категорий требования, за исключением требований 5.2.1.25.1.1.
Для ТС категорий М1 и N1 допускается активизация электрического рекуперативного торможения органом управления акселератором и/или переводом селектора трансмиссии в нейтральное положение.
Кроме того, действие рабочей тормозной системы не должно уменьшать упомянутый выше эффект торможения, вызываемый прекращением воздействия на орган управления акселератором.
5.2.1.25.2.4 На рабочую тормозную систему не должно оказывать неблагоприятное воздействие отсоединение электромотора (электромоторов) или используемое передаточное отношение.
5.2.1.25.2.5 Если действие электрического компонента торможения обусловливается взаимосвязью, установленной между информацией, поступающей от органа управления рабочих тормозов, и тормозной силой на соответствующих колесах, то на неисправности, искажающие эту взаимосвязь и ведущие к изменению распределения тормозных сил по осям (см. приложение К или приложение Л в зависимости от применимости), водителю должен указывать оптический предупреждающий сигнал, включающийся, по крайней мере, в момент активизации органа управления и остающийся включенным, пока эта неисправность не устранена и стартовый выключатель (ключ) ТС находится во включенном («ON») положении.
5.2.1.25.3 Магнитные и электрические поля не должны оказывать неблагоприятное воздействие на работу электрической рекуперативной тормозной системы.
5.2.1.25.4 Если ТС оборудовано АБС, эта система должна осуществлять управление электрической рекуперативной тормозной системой.
5.2.1.26 Специальные дополнительные требования к электрическому приводу стояночной тормозной системы
5.2.1.26.1 В случае неисправности в электрическом тормозном приводе должна быть исключена любая самопроизвольная активизация стояночной тормозной системы.
5.2.1.26.2 В случае разрыва электропроводки внутри электрического управляющего привода, внешнего по отношению к электронному блоку (электронным блокам) управления, исключая источники энергии, или в случае неисправности в органе управления должна оставаться возможность приведения в действие стояночной тормозной системы с рабочего места водителя и удерживания с ее помощью груженого ТС в неподвижном состоянии на подъеме или уклоне 8 %. Вместо выполнения этого требования в тех же случаях допускается автоматическая активизация стояночных тормозов на неподвижном ТС при условии, что достигается та же их эффективность и что, будучи включенными, они остаются включенными независимо от положения ключа зажигания (стартового ключа). При этом стояночные тормоза должны автоматически освобождаться, как только водитель начнет приводить ТС в состояние движения. В случае ТС категорий М1 и N1 допускается использовать двигатель и механическую силовую передачу или автоматическую трансмиссию (в режиме парковки) для достижения или помощи в достижении предписанной выше эффективности стояночного торможения. Кроме того, должна быть предусмотрена возможность, в случае необходимости, прекращения действия стояночной тормозной системы с использованием инструментов и/или вспомогательных устройств, перевозимых/установленных на ТС.
5.2.1.26.2.1 При разрыве электропроводки внутри электрического привода или неисправности в органе управления стояночной тормозной системы водитель должен быть проинформирован об этом с помощью желтого предупреждающего сигнала, требования к которому установлены в 5.2.1.29.1.2. При разрыве электропроводки внутри электрического управляющего привода стояночной тормозной системы этот желтый предупреждающий сигнал должен включаться, как только такой разрыв произошел. Кроме того, водитель должен быть информирован об упомянутой выше неисправности в органе управления или разрыве в электропроводке вне электронного блока (электронных блоков) управления, исключая источник энергии, с помощью мигающего красного предупреждающего сигнала, требования к которому установлены в 5.2.1.29.1.1. Сигнал должен оставаться включенным все время, в течение которого ключ зажигания (стартовый ключ) находится в положении «Включено» («ON»), и не менее 10 с после этого при условии, что орган управления находится в положении «Включено» («ON»). Если об активизации стояночной тормозной системы в нормальных условиях информирует отдельный предупреждающий красный сигнал, соответствующий всем требованиям 5.2.1.29.3, то этот сигнал необходимо использовать и в описанном выше случае при условии выполнения указанных требований к красному сигналу.
5.2.1.26.3 Допускается подвод питания от электрического привода стояночной тормозной системы к дополнительному оборудованию при условии, что этой энергии достаточно для активизации стояночной тормозной системы в дополнение к электрической нагрузке в цепи ТС в условиях отсутствия неисправностей. Кроме того, там, где аккумулятор энергии используется также рабочей тормозной системой, должны быть выполнены требования 5.2.1.27.7.
5.2.1.26.4 После того как ключ зажигания/стартовый ключ, управляющий подачей электроэнергии в тормозное оборудование, переключен в положение «Выключено» и/или вынут, должна еще оставаться возможность приведения в действие стояночной тормозной системы, поскольку не должно произойти отключение этой системы.
5.2.1.27 Специальные дополнительные требования к рабочим тормозным системам с электрическим управлением
5.2.1.27.1 При отпущенном стояночном тормозе рабочая тормозная система должна быть способна создавать суммарную статическую тормозную силу, по меньшей мере равную тормозной силе, предписанной для испытания «Тип-0», даже в том случае, когда ключ зажигания/стартовый ключ находится в позиции «Выключено» и/или вынут. Механические ТС, официально допущенные к буксированию прицепов категорий О3 и О4, должны вырабатывать полный управляющий сигнал для рабочей тормозной системы прицепов. При этом в электрический привод рабочей тормозной системы должно поступать достаточное количество энергии.
5.2.1.27.2 Единичный временный отказ длительностью менее 40 мс в электрическом управляющем приводе, за исключением его энергоснабжения (например, перерыв в передаче сигнала или информационный сбой), не должен оказывать значимого влияния на эффективность рабочего торможения.
5.2.1.27.3 Водитель должен быть информирован о неисправности в электрическом управляющем приводе 1), влияющей на функционирование и эффективность систем, на которые распространяются требования настоящего стандарта, за исключением входящего в этот привод аккумулятора энергии, с помощью красного или желтого предупреждающего сигнала, требования к которому установлены в 5.2.1.29.1.1 и 5.2.1.29.1.2 в зависимости от применимости. Когда предписанная эффективность торможения не может быть далее обеспечена, водитель должен быть проинформирован о неисправностях в электрической цепи (разрыве цепи, потере контакта), как только эти неисправности возникают, включением красного предупреждающего сигнала, при этом предписанная остаточная эффективность торможения должна быть обеспечена воздействием на орган управления рабочей тормозной системы в соответствии с В.2.4 (приложение В). Эти требования не означают невыполнения установленных требований к запасному торможению.
___________
1) До тех пор, пока не согласованы единые методы испытаний, изготовитель должен представлять в соответствующий компетентный орган информацию по анализу возможных неисправностей в управляющем приводе и их последствий. Такая информация должна быть предметом обсуждения и последующего соглашения между этим органом и изготовителем.
5.2.1.27.4 На механическом ТС, электрически соединенном с прицепом через электрический управляющий тормозной привод, должно быть обеспечено четкое предупреждение водителя о неисправности, как только запас энергии в любой части рабочей тормозной системы прицепа упадет ниже критического уровня, установленного в 5.2.2.16. Аналогичное предупреждение должно быть обеспечено, когда в электрическом управляющем приводе прицепа, за исключением его аккумулятора энергии, происходит размыкание в электрической цепи длительностью более 40 мс, препятствующее достижению эффективности рабочего торможения прицепа, предписанной в 5.2.2.15.2.1. Для такого предупреждения необходимо использовать красный предупреждающий сигнал, требования к которому установлены в 5.2.1.29.2.1.
5.2.1.27.5 В случае неисправности в источнике энергии электрического управляющего привода, начавшей проявляться при нормальном уровне его запаса энергии, после двадцати последовательных полных ходов органа управления рабочей тормозной системы должен быть гарантирован весь диапазон управляющих воздействий на рабочую тормозную систему. В процессе испытания на орган управления тормозами в пределах каждой последовательной активизации в течение 20 с должно быть оказано максимальное воздействие с последующим освобождением органа управления на период 5 с. В течение описанного выше испытания должно быть подано достаточное количество энергии для обеспечения полной активизации рабочей тормозной системы. Выполнение этого требования не устраняет необходимости выполнения требований, установленных в приложении Е.
5.2.1.27.6 Если напряжение аккумуляторной батареи упало до уровня ниже предельного, установленного изготовителем, при котором предписанная эффективность рабочего торможения уже не может быть гарантирована и/или которое препятствует каждому из по меньшей мере двух независимых контуров рабочей тормозной системы достичь предписанной эффективности запасного или остаточного торможения, то должен включиться красный предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.1. После включения предупреждающего сигнала должна сохраняться возможность применения органа управления рабочей тормозной системой и обеспечения, по меньшей мере, остаточной эффективности торможения, требования к которой установлены в В.2.4 (приложение В). При этом должно быть подано достаточное количество энергии для рабочей тормозной системы. Выполнение данного требования не устраняет необходимости выполнения требований, относящихся к запасному торможению.
5.2.1.27.7 Если вспомогательное оборудование снабжается энергией из того же аккумулятора энергии, что и электрический управляющий привод, то при работе двигателя на частоте, не превышающей 80 % максимальной частоты вращения под нагрузкой, подача энергии, необходимой для достижения предписанных значений замедления, должна быть обеспечена либо подводом энергии, достаточной для предотвращения разрядки этого аккумулятора при работе всего вспомогательного оборудования под полной нагрузкой, либо автоматическим отключением заранее выбранных элементов вспомогательного оборудования при напряжении выше критического уровня, определенного в 5.2.1.27.6, с целью предотвращения дальнейшей разрядки аккумулятора. Выполнение этого требования может быть подтверждено расчетом или испытаниями. Для ТС, официально допущенных к буксированию прицепов категории О3 или О4, расход энергии прицепом должен быть учтен подсоединением нагрузки 400 Вт. Требования настоящего пункта не распространяются на ТС, предписанные значения замедления которых могут быть достигнуты без использования электрической энергии.
5.2.1.27.8 Если вспомогательное оборудование снабжают энергией от электрического управляющего привода, должны быть выполнены следующие требования:
5.2.1.27.8.1 В случае возникновения неисправности источника энергии при движении ТС запас энергии в аккумуляторе должен быть достаточным для активизации тормозов при воздействии на орган управления.
5.2.1.27.8.2 В случае возникновения неисправности источника энергии на неподвижном ТС с активизированной стояночной тормозной системой запас энергии в аккумуляторе должен быть достаточным для включения освещения даже при активизированных тормозах.
5.2.1.27.9 В случае неисправности электрического управляющего привода рабочей тормозной системы буксирующего ТС, оборудованного электрической управляющей магистралью в соответствии с 5.1.3.1.2 или 5.1.3.1.3, должна оставаться возможность полной активизации тормозов прицепа.
5.2.1.27.10 В случае неисправности электрического управляющего привода тормозов прицепа, соединенного с буксирующим ТС только электрической управляющей магистралью в соответствии с 5.1.3.1.3, торможение прицепа должно быть обеспечено в соответствии с 5.2.1.18.4.1. Это требование должно быть выполнено как в случае, когда на прицепе возник сигнал, требующий осуществления торможения по питающей магистрали и передающийся по цепи передачи информации, встроенной в электрическую управляющую магистраль, так и в случае длительного перерыва в передаче информации. Требования настоящего пункта не распространяются на механические ТС, не предназначенные для эксплуатации с прицепами, соединение с которыми осуществляется только по электрической управляющей магистрали в соответствии с 5.1.3.5.
5.2.1.28 Специальные требования к регулятору усилия в сцепном устройстве
5.2.1.28.1 Регулятор усилия в сцепном устройстве должен быть установлен только на буксирующее ТС.
5.2.1.28.2 Действие регулятора усилия в сцепном устройстве должно уменьшать разность динамических удельных тормозных сил буксирующего и буксируемого ТС. Функционирование регулятора усилия в сцепном устройстве должно быть проверено испытательной лабораторией. Метод выполнения проверки должен быть согласован с изготовителем, также как и метод оценки результатов. Полученные результаты должны быть представлены в отчете об испытаниях.
5.2.1.28.2.1 Регулятор усилия в сцепном устройстве может управлять удельной тормозной силой ТМ/РМ и/или тормозными силами прицепа. Если буксирующее ТС оборудовано двумя управляющими магистралями в соответствии с 5.1.3.1.2, сигналы, поступающие от обеих магистралей, должны вызывать одинаковые регулирующие воздействия.
5.2.1.28.2.2 Регулятор усилия в сцепном устройстве не должен препятствовать использованию максимально возможного давления для осуществления торможения.
5.2.1.28.2.3 ТС должно удовлетворять требованиям соответствия диапазону нагрузок, установленным в приложении К, однако для обеспечения требований 5.2.1.28.2 допускается отклонение ТС от требований приложения К при работающем регуляторе усилия в сцепном устройстве.
5.2.1.28.2.4 Водитель должен быть проинформирован о неисправности регулятора усилия в сцепном устройстве желтым предупреждающим сигналом, соответствующим требованиям 5.2.1.29.1.2. В случае возникновения неисправности должны быть выполнены применимые к этому случаю требования приложения К.
5.2.1.28.5 Желтый предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.2, должен информировать водителя о компенсирующем действии регулятора усилия в сцепном устройстве, если эта компенсация превышает ± 1,5 бар относительно номинального требуемого значения, определяемого в 2.28.3, но не превышает значения рm = 6,5 бар (или эквивалентного ему дискретного значения электрического сигнала). Если значение рm превышает 6,5 бар, то предупреждение должно быть выдано в том случае, когда компенсация приводит к перемещению точки срабатывания (см. рисунки 1 и 2) за пределы диапазона совместимости нагрузок, установленного для механических ТС в приложении К.
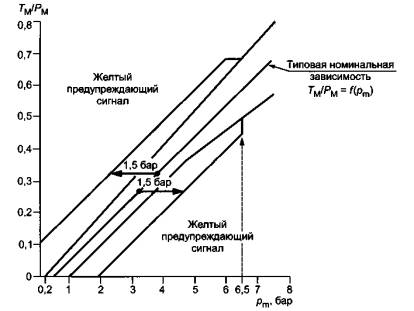
Рисунок 1 - Допустимые отклонения зависимости удельной тормозной силы тягача (ТМ/РМ) от давления в соединительной головке рm. (За исключением седельных тягачей.)
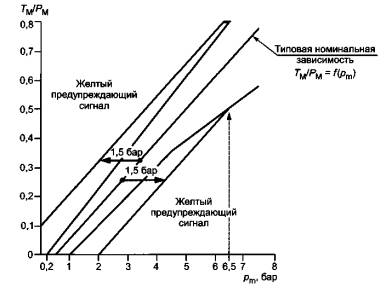
Рисунок 2 - Допустимые отклонения зависимости удельной тормозной силы тягача (ТМ/РМ) от давления в соединительной головке рm. (Для седельных тягачей.)
5.2.1.28.6 Система регулирования усилия в сцепном устройстве должна быть применена только для управления усилиями в сцепном устройстве, возникающими при действии рабочей тормозной системы тягача и прицепа. Усилия в сцепном устройстве, возникающие под действием тормозных систем длительного действия, не должны компенсироваться с помощью рабочих тормозных систем тягача или прицепа. Принято считать, что тормозные системы длительного действия не являются составными частями рабочих тормозных систем.
5.2.1.29 Общие требования к оптическим предупреждающим сигналам, предназначенным для информирования водителя о неисправностях (дефектах) конкретных заранее установленных видов в тормозном оборудовании механического ТС или, где применимо, его прицепа, приведены в 5.2.1.29.1 - 5.2.1.29.5. Применение этих сигналов в случаях, не указанных в 5.2.1.29.6, допускается только в соответствии с предписаниями настоящего стандарта.
5.2.1.29.1 Оптические предупреждающие сигналы в механических ТС должны информировать о следующих неисправностях и дефектах тормозов:
5.2.1.29.1.1 красный предупреждающий сигнал - об указанных в настоящем стандарте неисправностях в тормозных системах, препятствующих реализации полной эффективности рабочего торможения и/или нарушающих функционирование по меньшей мере одного из двух независимых контуров рабочей тормозной системы;
5.2.1.29.1.2 желтый предупреждающий сигнал, где это применимо, - о дефекте в тормозном оборудовании ТС, информация о котором передана по электрической цепи и о наличии которого не информирует красный предупреждающий сигнал по 5.2.1.29.1.1.
5.2.1.29.2 За исключением ТС категорий М1 и N1, в механических ТС, оборудованных электрической управляющей магистралью и/или официально допущенных к буксированию прицепов, имеющих электрический привод тормозов и и/или АБС, должен быть предусмотрен отдельный желтый предупреждающий сигнал, информирующий о дефекте в АБС и/или в электрическом тормозном приводе тормозного оборудования прицепа. Электрический сигнал о дефекте должен поступать от прицепа через штырь № 5 электрического соединителя, соответствующего [3] или [4] 1).
Во всех случаях электрический сигнал должен передаваться без существенных задержек и искажений в электрической цепи буксирующего ТС. Оптический предупреждающий сигнал не должен включаться, если буксирующее ТС соединено с прицепом при отсутствии электрической управляющей магистрали и/или электрического привода тормозов и/или АБС или же буксирующее ТС не соединено с прицепом. Описанная функция должна быть автоматической.
__________
1) Указанные соединители могут иметь как пяти-, так и семиштырьковое исполнение.
5.2.1.29.2.1 Для механического ТС, оборудованного электрической управляющей магистралью, при наличии соединения с прицепом по этой управляющей магистрали, также должен быть предусмотрен красный предупреждающий сигнал, соответствующий требованиям 5.2.1.29.1.1 и информирующий о конкретных неисправностях заранее установленных видов в тормозном оборудовании прицепа каждый раз, когда от прицепа через контур передачи данных в электрической управляющей магистрали поступает соответствующая информация. Красный предупреждающий сигнал дополняет желтый предупреждающий сигнал, требования к которому установлены в 5.2.1.29.1.2. Допускается вместо использования красного предупреждающего сигнала, требования к которому установлены в 5.2.1.29.1.1, совместно с желтым предупреждающим сигналом, упомянутым выше, оборудовать буксирующее ТС отдельным красным предупреждающим сигналом, информирующим о неисправностях заранее установленных видов в тормозном оборудовании прицепа.
5.2.1.29.3 Предупреждающие сигналы должны быть различимы в любое время суток. Водитель, находясь на своем рабочем месте, должен легко распознавать включенное и выключенное состояния предупреждающих сигналов. Неисправности элементов предупреждающих устройств не должны приводить к уменьшению эффективности тормозных систем.
5.2.1.29.4 Если не установлены иные требования, то:
5.2.1.29.4.1 водитель должен быть информирован о возникновении неисправности заранее установленного вида с помощью вышеупомянутого предупреждающего сигнала (сигналов) не позднее, чем произойдет активизация соответствующего органа управления;
5.2.1.29.4.2 предупреждающий(е) сигнал (сигналы) должен (должны) оставаться включенным в течение всего времени наличия неисправности и при нахождении ключа зажигания в положении «Включено» («ON»), и
5.2.1.29.4.3 предупреждающий сигнал должен быть включен в постоянном (немигающем) режиме.
5.2.1.29.5 Вышеуказанный предупреждающий сигнал (сигналы) должен включаться при включении электрооборудования ТС (в том числе электрических цепей тормозной системы). При неподвижном ТС тормозная система должна подтвердить отсутствие неисправностей и дефектов всех заранее установленных видов, и только после этого предупреждающий сигнал (сигналы) должен выключаться. Информация о неисправностях и дефектах заранее установленных видов, которые должны были бы активизировать предупреждающий сигнал (сигналы), указанный(е) выше, но которые не выявляются на неподвижном ТС, должна накапливаться по мере их обнаружения, и соответствующие сигналы должны предупреждать водителя о наличии указанных выше неисправностей и дефектов при пуске двигателя, а также каждый раз, когда ключ зажигания (стартовый ключ) находится в положении «Включено» («ON»), на протяжении всего времени наличия этих неисправностей (дефектов).
5.2.1.29.6 Допускается информировать о неисправностях (дефектах) не установленных заранее видов или показывать иные сведения, касающиеся тормозов и/или ходовой части механических ТС, с помощью желтых сигналов, требования к которым установлены в 5.2.1.29.1.2, при соблюдении следующих условий:
5.2.1.29.6.1 ТС неподвижно;
5.2.1.29.6.2 после того как в электрическую цепь тормозного оборудования впервые была подана электроэнергия и сигнал показал, что при выполнении процедур, описанных в 5.2.1.29.5, не было идентифицировано наличие каких-либо неисправностей заранее установленных видов, и
5.2.1.29.6.3 информация о неисправностях заранее не установленных видов и иная информация отображается только посредством мигания предупреждающего сигнала. Однако предупреждающий сигнал должен выключиться до момента, когда скорость ТС впервые превысит 10 км/ч.
5.2.1.30 Выработка сигнального импульса для включения ламп сигналов торможения (стоп-сигналов)
5.2.1.30.1 Активизация водителем рабочей тормозной системы должна приводить к выработке сигнального импульса, который будет использован для включения ламп сигналов торможения.
5.2.1.30.2 Выработка сигнального импульса, связанного с работой тормозных систем длительного действия
5.2.1.30.2.1 Допускается выработка сигнального импульса, связанного с активизацией тормозной системы длительного действия, кроме случая, когда замедление происходит только вследствие торможения двигателем.
5.2.1.30.3 Активизация рабочей тормозной системы с помощью «торможения, управляемого автоматически» (см. 2.29) должна приводить к выработке указанного выше сигнального импульса. Однако если осуществляемое замедление не превышает 0,7 м/с2 при скорости ТС более 50 км/ч, этот сигнальный импульс может быть отключен 1).
__________
1) Соответствие настоящему требованию должно быть подтверждено изготовителем.
5.2.1.30.4 Активизация части рабочей тормозной системы с помощью «выборочного торможения» (см. 2.30) не должна приводить к выработке сигнального импульса 2).
__________
2) В процессе «выборочного торможения» режим торможения может преобразоваться в «торможение, управляемое автоматически».
5.2.1.30.5 Если ТС оборудовано электрической управляющей магистралью, сигнальный импульс должен вырабатываться буксирующим ТС, когда от прицепа по электрической управляющей магистрали получено сообщение «Включить сигналы торможения» 3).
___________
3) Настоящее требование не должно быть применено, пока в [2] не будет внесено изменение, описывающее сообщение «Включить сигналы торможения».
5.2.1.30.6 Электрические рекуперативные тормозные системы, создающие замедляющую силу при освобождении педали газа, не должны вырабатывать сигнальный импульс.
5.2.1.31 Если ТС оборудовано устройствами, информирующими об аварийном торможении, то активизация и прекращение действия сигнала аварийного торможения должны отвечать следующим требованиям:
5.2.1.31.1 Сигнал должен активизироваться при значениях замедления, вызванного воздействием рабочей тормозной системы, не менее:
- для ТС категорий М1 и N1 - 6 м/с2;
- для ТС категорий М2, М3, N2 и N3 - 4 м/с2.
Для всех ТС сигнал должен прекращать свое действие не позднее момента падения замедления ниже 2,5 м/с2.
5.2.1.31.2 Допускается также выполнение следующих условий:
а) при активизации рабочей тормозной системы на порожнем ТС с отсоединенным двигателем в испытании «Тип-0» (см. приложение В) сигнал аварийного торможения должен активизироваться при значениях замедления, не менее:
- для ТС категорий М1 и N1 - 6 м/с2;
- для ТС категорий М2, М3, N2 и N3 - 4 м/с2.
(При этом для всех ТС сигнал должен прекращать свое действие не позднее момента падения замедления ниже 2,5 м/с2.) или
б) при активизации рабочей тормозной системы, когда ТС движется со скоростью свыше 50 км/ч и АБС работает по полному циклу в соответствии с Н.2 (приложение Н).
Сигнал должен прекращать свое действие, после того как ABC перестает работать по полному циклу.
5.2.2 Транспортные средства категории О
5.2.2.1 Прицепы категории О1 допускается не оборудовать рабочей тормозной системой, однако если на прицеп этой категории установлена рабочая тормозная система, он должен удовлетворять тем же требованиям, что и прицеп категории О2.
5.2.2.2 Прицепы категории О2 должны иметь рабочую тормозную систему неразделенного, полуразделенного или инерционного типа. Тормозную систему инерционного типа допускается устанавливать только на прицепы с центральной осью. Однако допускается применение электрических тормозных систем, соответствующих требованиям приложения П.
5.2.2.3 Прицепы категорий О3 и О4 должны иметь рабочую тормозную систему неразделенного или полуразделенного типа.
5.2.2.4 Рабочая тормозная система должна:
5.2.2.4.1 действовать на все колеса ТС;
5.2.2.4.2 распределять свое действие соответствующим образом по осям ТС;
5.2.2.4.3 иметь по меньшей мере в одном резервуаре сжатого воздуха устройство для дренажа и осушения, расположенное в легкодоступном месте.
5.2.2.5 Действие рабочей тормозной системы должно быть распределено по колесам каждой оси ТС симметрично относительно продольной плоскости симметрии ТС. Наличие устройств компенсации тормозных сил и таких систем, как АБС, которые могут нарушить симметрию распределения действия рабочей тормозной системы, должно быть декларировано.
5.2.2.5.1 Водитель должен быть проинформирован желтым предупреждающим сигналом, требования к которому установлены в 5.2.1.29.2, о том, что в тормозной системе имеется износ или неисправность, компенсируемая с помощью электрического управляющего привода. Это требование должно быть выполнено при всех условиях нагружения, если отклонения, которые необходимо компенсировать, превышают следующие предельные значения:
5.2.2.5.1.1 для компенсации разности давлений в тормозных приводах левой и правой сторон на каждой оси:
а) 25 % наибольшего значения давления при замедлении ТС не менее 2 м/с2;
б) значение, соответствующее 25 % значения давления для замедления, равного 2 м/с2, при замедлении менее 2 м/с2;
5.2.2.5.1.2 для индивидуальной компенсации давления на каждой оси:
а) более 50 % номинального значения при замедлении ТС не менее 2 м/с2;
б) значение, соответствующее 50 % номинального значения для замедления, равного 2 м/с2, при замедлении менее 2 м/с2.
5.2.2.5.2 Компенсация, установленная выше, допускается только при условии, что первичное приведение в действие тормозов имеет место при скоростях ТС, превышающих 10 км/ч.
5.2.2.6 Неисправности в электрическом тормозном приводе не должны вызывать торможение ТС, если это противоречит намерениям водителя.
5.2.2.7 Рабочие поверхности тормозов, действие которых необходимо для обеспечения предписанной эффективности торможения, должны быть постоянно связаны с колесами или непосредственно, или через элементы, не подверженные разрушению.
5.2.2.8 Износ тормозов должен быть легко устранимым с помощью системы ручной или автоматической регулировки. При этом орган управления и элементы тормозного привода должны сохранять возможность перемещения и, если необходимо, должны быть предусмотрены соответствующие компенсирующие устройства, позволяющие, когда тормоза нагреваются или когда тормозные накладки достигают определенной степени износа, обеспечить эффективное торможение без возникновения необходимости немедленной регулировки.
5.2.2.8.1 Регулировка, компенсирующая износ рабочих тормозов, должна осуществляться автоматически. Однако установка устройств автоматической регулировки тормозов не является обязательной для ТС категорий О1 и О2.
Тормоза, оборудованные устройствами их автоматической регулировки должны после следующих друг за другом циклов нагрева и охлаждения обеспечивать свободное качение ТС, как определено в В. 1.7.3 (приложение В) за пунктами, устанавливающими требования к испытаниям «Тип-I» или «Тип-III».
5.2.2.8.1.1 Для прицепов категории О4 требования 5.2.2.8.1 следует считать выполненными, если удовлетворены требования В.1.7.3.
5.2.2.8.1.2 Для прицепов категорий О2 и О3 требования 5.2.2.8.1 следует считать выполненными, если удовлетворены требования В.1.7.3 1).
___________
1) До принятия единых технических положений, позволяющих объективно оценить функционирование устройства автоматической регулировки тормозов, требование свободного качения ТС следует считать выполненным, если это свободное качение имеет место при всех испытаниях тормозов, предписанных для соответствующего прицепа.
5.2.2.8.2 Проверка на износ фрикционных элементов рабочего тормоза
5.2.2.8.2.1 Должен быть обеспечен легкий доступ к рабочему тормозу для проверки на износ тормозных накладок снаружи ТС или со стороны дорожного полотна, например через предусмотренные конструкцией отверстия или какие-либо другие устройства с использованием исключительно инструментов и приспособлений, входящих в штатную комплектацию ТС.
5.2.2.8.2.2 Оценку степени износа рабочих поверхностей тормозных дисков и барабанов допускается проводить только непосредственным измерением рабочих элементов, для чего может потребоваться частичная разборка. Поэтому для проведения испытаний на соответствие настоящему стандарту изготовитель ТС должен:
а) определить метод оценки износа рабочих поверхностей дисков и барабанов, включая степень требуемого демонтажа, а также необходимые для этого инструменты и процедуры;
б) подготовить информацию о максимально допустимом износе, при достижении которого необходима замена этих элементов.
Эта информация должна быть свободно доступна, например в инструкции по эксплуатации или на электронном носителе.
5.2.2.9 Тормозные системы должны быть такими, чтобы при разъединении сцепного устройства во время движения прицеп автоматически затормаживался до полной остановки. Однако это требование не распространяется на прицепы, максимальная масса которых не превышает 1,5 т, при условии, что прицепы оборудованы в дополнение к основному сцепному устройству запасным соединительным приспособлением (цепью, проволочным тросом и т.п.), предотвращающим в случае разъединения основного сцепного устройства контакт дышла с дорожным полотном и обеспечивающим некоторое остаточное управляющее воздействие на прицеп.
5.2.2.10 На любом прицепе, который оборудован рабочей тормозной системой, должно также быть обеспечено стояночное торможение даже в случае отсоединения прицепа от буксирующего ТС. Стояночное тормозное устройство должно предусматривать возможность его активизации лицом, стоящим на опорной поверхности, однако если прицеп используют для перевозки людей, это устройство должно обеспечивать его активизацию изнутри прицепа.
5.2.2.11 Если прицеп комплектуют устройством, позволяющим перекрывать активизацию сжатым воздухом тормозной системы иной, чем стояночная тормозная система, эта иная система должна быть сконструирована так, чтобы она возвращалась в неактивизированное положение не позднее момента восстановления подачи сжатого воздуха к тормозной системе прицепа.
5.2.2.12 Прицепы категорий О3 и О4 должны удовлетворять требованиям 5.2.1.18.4.2. В управляющей магистрали за соединительной головкой (по направлению потока) необходимо установить легкодоступный контрольный штуцер.
5.2.2.12.1 Если прицепы оборудованы электрической управляющей магистралью, соединенной с электрической управляющей магистралью буксирующего ТС, автоматическое торможение в соответствии с 5.2.1.18.4.2 не реализуется, пока давления в резервуарах сжатого воздуха прицепа достаточно для обеспечения эффективности торможения, предписанной В.3.3 (приложение В).
5.2.2.13 Прицепы категории О3 должны быть оборудованы АБС в соответствии с требованиями приложения Н. Прицепы категории О4 должны быть оборудованы АБС в соответствии с требованиями приложения Н, предназначенными для категории А.
5.2.2.14 Если вспомогательное оборудование получает энергию из рабочей тормозной системы, рабочая тормозная система должна быть защищена от потерь энергии. При этом сумма тормозных сил на наружных поверхностях колес должна составлять не менее 80 % значения, предписанного для соответствующего прицепа в В.3.1.2.1 (приложение В). Это требование должно быть удовлетворено в следующих условиях эксплуатации:
- при работе вспомогательного оборудования и
- в случае разрыва магистралей, подсоединяющих вспомогательное оборудование, или утечки из них, если только эти неисправности не воздействуют на сигнал управления, упомянутый в К.6 (приложение К). В последнем случае должны быть выполнены требования к тормозной эффективности, установленные в К.6.
5.2.2.14.1 Установленные выше требования считают выполненными, если давление в аккумуляторе(ах) энергии рабочей тормозной системы поддерживается на уровне не менее 80 % требуемого давления в управляющей магистрали или эквивалентного ему дискретного значения электрического сигнала в соответствии с В.3.1.2.2 (приложение В).
5.2.2.15 Специальные дополнительные требования для рабочих тормозных систем с электрическим управляющим приводом
5.2.2.15.1 В случае возникновения единичной временной неисправности в электрическом управляющем приводе продолжительностью менее 40 мс (например, прерывания передачи сигнала или искажения передаваемой информации), исключая неисправность в его энергоснабжении, эта неисправность не должна снижать эффективность рабочей тормозной системы.
5.2.2.15.2 При возникновения неисправности в электрическом управляющем приводе (например, разрыва, потери контакта) должно сохраняться не менее 30 % эффективности рабочей тормозной системы, предписанной для соответствующего прицепа. Для прицепов, соединенных с буксирующим ТС только электрической управляющей магистралью в соответствии с 5.1.3.1.3 и удовлетворяющих требованиям 5.2.1.18.4.2 при эффективности торможения, предписанной В.3.3 (приложение В), в случае, когда эффективность торможения прицепа, превышающая 30 % предписанной эффективности торможения, не может быть далее обеспечена, достаточно выполнения требований 5.2.1.27.10. Выполнение этих требований инициируется либо передачей по цепи передачи информации электрической управляющей магистрали сигнала «Торможение по питающей магистрали», либо полным отсутствием передачи информации по этой цепи.
5.2.2.15.2.1 Водитель должен быть информирован о неисправности в электрическом управляющем приводе прицепа, исключая его аккумулятор энергии, влияющей на функционирование и эффективность систем, на которые распространяется настоящий стандарт, и о неисправностях в подаче энергии через электрический соединитель, соответствующий [3] или [4] 1), с помощью отдельного предупреждающего сигнала, требования к которому установлены в 5.2.1.29.2. Сигнал на включение предупреждающего сигнала должен передаваться через штырь № 5 электрического соединителя, соответствующего [3] или [4]1), 2).
______________
1) Этот соединитель может быть применен как в пяти-, так и семиштырьковой модификации.
2) До тех пор, пока не согласованы единые методы испытаний, изготовитель должен представлять в соответствующий компетентный орган информацию, относящуюся к анализу возможных неисправностей в управляющем приводе и их последствий. Эта информация должна быть предметом обсуждения и последующего соглашения между компетентным органом и изготовителем.
Кроме того, прицепы, оборудованные электрической управляющей магистралью, соединенной с буксирующим ТС, оборудованным аналогичной электрической управляющей магистралью, должны передавать информацию о неисправностях, соответствующую 5.2.1.29.2.1 и активизирующую красный предупреждающий сигнал. Эта информация должна передаваться через цепь передачи информации электрической управляющей магистрали в случае невозможности дальнейшего обеспечения предписанной эффективности рабочих тормозов прицепа.
5.2.2.16 Если значение находящейся в аккумуляторе(ах) энергии в любой части рабочей тормозной системы прицепа, оборудованного электрической управляющей магистралью, соединенной с электрической управляющей магистралью буксирующего ТС, уменьшается до значения, определяемого в 5.2.2.16.1, водитель буксирующего ТС должен быть предупрежден об этом. Предупреждение может быть осуществлено с помощью красного предупреждающего сигнала, требования к которому установлены в 5.2.1.29.2.1, и прицеп должен передавать соответствующую информацию через цепь передачи информации электрической управляющей магистрали. Отдельный желтый предупреждающий сигнал, требования к которому установлены в 5.2.1.29.2, также должен активизироваться через штырь № 5 электрического соединителя, соответствующего [3] или [4] 1), чтобы информировать водителя об уменьшении энергии на прицепе.
__________
1) Этот соединитель может быть применен как в пяти-, так и семиштырьковой модификации.
5.2.2.16.1 Нижний предел уменьшения энергии, о котором упомянуто в 5.2.2.16, должен быть установлен таким, чтобы без подзарядки аккумулятора энергии и безотносительно к загрузке прицепа уже невозможно было бы при пятом воздействии на орган управления рабочими тормозами после четырех полных воздействий обеспечить торможение с эффективностью, составляющей не менее 50 % предписанной эффективности рабочей тормозной системы соответствующего прицепа.
5.2.2.17 Прицепы, оборудованные электрической управляющей магистралью, и прицепы категорий О2 и О3, оборудованные АБС, должны быть укомплектованы специальным электрическим соединителем для тормозной системы и/или АБС, соответствующим [3] и [4]1), 2). Предупреждающие сигналы, подачу которых со стороны прицепа требует настоящий стандарт, должны активизироваться через упомянутый выше электрический соединитель. Требования, предъявляемые к прицепам в отношении передачи сигналов о возникших неисправностях, должны соответствовать 5.2.1.29.4, 5.2.1.29.5 и 5.2.1.29.6.
_____________
1) Этот соединитель может быть применен как в пяти-, так и семиштырьковой модификации.
2) Требования [3] и [4] к электропроводке прицепа, не предназначенной для передачи электрических управляющих сигналов, могут быть снижены, если прицеп укомплектован собственным независимым предохранителем. Предельный ток, на который рассчитан предохранитель, должен быть таким, чтобы не превышать аналогичный параметр электропроводки.
Прицепы, оборудованные соединителем, соответствующим [3] и [4], указанные выше, должны иметь нестираемую маркировку, информирующую о функциональных возможностях тормозной системы при замкнутом и разомкнутом состояниях соединителя. Эта маркировка должна быть расположена так, чтобы ее было видно при приведении в замкнутое состояние соединительных устройств пневматических и электрических магистралей.
5.2.2.17.1 Прицепы, в которых используют выборочное торможение как средство обеспечения устойчивости ТС, должны в случае неисправности в электрическом управляющем приводе системы обеспечения устойчивости информировать об этой неисправности с помощью отдельного желтого предупреждающего сигнала, требования к которому установлены в 5.2.1.29.2. Электрический сигнал, активизирующий этот предупреждающий сигнал, должен передаваться через штырь № 5 соединителя, соответствующего [3] и [4].
Примечание - Это требование необходимо будет вновь рассмотреть при последующих изменениях настоящего стандарта, учитывающих:
а) намеченное изменение международных стандартов [1] и [2], касающееся электрического сигнала, информирующего о неисправности в электрическом управляющем приводе системы управления устойчивостью прицепа, и
б) появление в обычной эксплуатации ТС, оборудованных в соответствии с этими международными стандартами.
5.2.2.17.2 Допускается подсоединение тормозной системы к источнику электроэнергии в дополнение к источнику, подсоединенному через упомянутый выше соединитель, соответствующий [3] или [4]. Однако подсоединение дополнительного источника энергии возможно только при выполнении следующих условий:
- во всех случаях источник энергии для тормозной системы, подсоединенный через соединитель, соответствующий [3] или [4], должен быть основным по отношению к любому дополнительно подсоединенному источнику. Дополнительный источник энергии предназначается для дублирования основного источника в случае его отказа;
- подсоединение дополнительного источника не должно оказывать неблагоприятное воздействие на тормозную систему как при работе в нормальном режиме, так и при возникновении неисправности;
- в случае отказа источника энергии, подсоединенного через соединитель, соответствующий [3] и [4], энергия, поглощаемая тормозной системой, не должна превосходить максимально возможную энергию от дополнительного источника;
- не допускается применение предупреждающего устройства для сигнализации о возникновении отказа в тормозной системе прицепа в случае снабжения тормозной системы энергией из дополнительного источника;
- при наличии дополнительного источника энергии должна быть обеспечена проверка работы тормозной системы от этого источника;
- если возникла неисправность в передаче электрической энергии через соединитель, соответствующий [3] и [4], требования 5.2.2.15.2.1 и Н.4.1 (приложение Н), относящиеся к сигналу о неисправности, должны быть выполнены и в случае работы тормозной системы от дополнительного источника энергии.
5.2.2.18 Если энергия, передаваемая через соединитель, соответствующий [3] и [4], используется для выполнения функций, определенных в 5.1.3.6, тормозная система должна обладать приоритетом и быть защищена от внешних перегрузок. Такая защита должна быть функцией тормозной системы.
5.2.2.19 В случае неисправности в одной из управляющих магистралей, соединяющих два ТС, оборудованных в соответствии с 5.1.3.1.2, прицеп должен переключиться на неповрежденную управляющую магистраль, чтобы автоматически обеспечить тормозную эффективность, предписанную для прицепа в В.3.1 (приложение В).
5.2.2.20 Если значение напряжения в электрической цепи прицепа падает ниже значения, указанного изготовителем, при котором предписанная эффективность рабочей тормозной системы не может далее быть обеспечена, должен включиться отдельный оптический желтый предупреждающий сигнал, требования к которому установлены в 5.2.1.29.2. Соответствующий электрический сигнал должен проходить через штырь № 5 соединителя, соответствующего [3] и [4]1). Кроме того, прицепы, оборудованные электрической управляющей магистралью, соединенной с электрической управляющей магистралью буксирующего ТС, должны передавать информацию о неисправности для активизации красного предупреждающего сигнала, требования к которому установлены в 5.2.1.29.2.1. Эта информация должна передаваться по цепи передачи информации электрической управляющей магистрали.
__________
1) Этот соединитель может быть применен как в пяти-, так и семиштырьковой модификации.
5.2.2.21 Активизация рабочей тормозной системы
5.2.2.21.1 Если ТС оборудовано электрической управляющей магистралью, сообщение «Включить сигналы торможения» должно быть передано по электрической управляющей магистрали, когда тормозная система прицепа приводится в действие посредством «торможения, управляемого автоматически», активизируемого самим прицепом. Однако если возникающее замедление не превышает 0,7 м/с2 при скорости ТС более 50 км/ч, этот сигнальный импульс может быть отключен 2), 3).
____________
2) Соответствие настоящему требованию должно быть подтверждено изготовителем.
3) Настоящее требование не должно быть применено, пока в [2] не будет внесено изменение, описывающее сообщение «Включить сигналы торможения».
5.2.2.21.2 Если прицеп оборудован электрической управляющей магистралью, сообщение «Включить сигналы торможения» не должно передаваться от прицепа по электрической управляющей магистрали в процессе «выборочного торможения», активизируемого самим прицепом 4), 5).
_____________
4) В процессе «выборочного торможения» режим торможения может преобразоваться в «торможение, управляемое автоматически».
5) Настоящее требование не должно быть применено, пока в [2] не будет внесено изменение, описывающее сообщение «Включить сигналы торможения», и его содержание не будет введено в настоящий стандарт.
6 Испытания
Требования к испытаниям тормозов ТС, которые должны быть проведены, и требования к функционированию тормозов, выполнение которых необходимо для подтверждения соответствия настоящему стандарту, установлены в приложении В.
7 Изменение типа транспортного средства или типа тормозной системы, выдержавших испытания на соответствие настоящему стандарту, и расширение области распространения
7.1 Каждое изменение типа ТС или его тормозного оборудования в отношении характеристик, перечисленных в приложении Б, должно быть доведено до сведения испытательной лаборатории, выдавшей протокол испытаний на соответствие настоящему стандарту. Эта лаборатория может:
7.1.1 или прийти к заключению, что внесенные изменения не будут иметь значимых отрицательных последствий и измененный тип ТС будет удовлетворять требованиям, предъявляемым к данному типу ТС;
7.1.2 или провести дополнительные испытания.
Приложение А
(обязательное)
Тормозное оборудование, устройства, методы и условия, на которые не распространяется настоящий стандарт
А.1 Настоящий стандарт не распространяется на метод измерения времени реакции тормозов иных, чем пневматические тормоза.
Приложение Б
(рекомендуемое)
Форма приложения к протоколу испытаний
транспортного средства в отношении торможения
К протоколу испытаний №_______________
от _______________
Всего страниц____________
|
ПРИЛОЖЕНИЕ к
протоколу испытаний транспортного средства в отношении |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 Категория транспортного средства |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 Тип транспортного средства |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 Масса транспортного средства: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.1 Технически допустимая максимальная масса |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.2 Минимальная масса |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 Технически допустимая максимальная масса, приходящаяся на каждую ось |
. . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 Модель и тип тормозных накладок: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5.1 Тормозные накладки, испытанные на соответствие всем относящимся к ним требованиям приложения В |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5.2 Альтернативные тормозные накладки, испытанные на соответствие требованиям приложения Р |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 Механическое транспортное средство1): |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.1 Тип двигателя |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.2 Число передач и передаточные числа коробки передач и раздаточной коробки2) |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.3 Передаточное число главной передачи |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4 Технически допустимая максимальная масса прицепа3): |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4.1 Полный прицеп |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4.2 Полуприцеп |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4.3 Прицеп с центральной осью |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4.4 Прицеп без тормозов |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6.4.5 Технически допустимая максимальная масса комбинации транспортных средств (автопоезда) |
. . . . . . . . . . . . . . . . . . . . . кг |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7 Характеристики шин: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7.1 Размерные характеристики запасного колеса для временного использования |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7.2 Транспортное средство удовлетворяет требованиям приложения 3 ГОСТ Р 41.64-99, да/нет4) |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
8 Число и расположение осей |
. . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
9 Краткое описание тормозного оборудования |
. . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
10 Массы, приходящиеся на элементы конструкции транспортного средства, подвергнутого испытаниям:
11 Результаты испытаний и характеристики транспортного средства:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.6 Тормозная система (системы), используемая в испытаниях «Тип-II»/«Тип-IIА»4) |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.7 Время реакции и размеры гибких шлангов: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.7.1 Время реакции исполнительного устройства |
. . . . . . . . . . . . . . . . . . . . . . c |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.7.2 Время реакции соединительной головки управляющей магистрали |
. . . . . . . . . . . . . . . . . . . . . . c |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.7.3 Размеры гибких шлангов тягача, предназначенных для соединения с полуприцепом: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
длина |
. . . . . . . . . . . . . . . . . . . . . . м |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
внутренний диаметр |
. . . . . . . . . . . . . . . . . . . . . . м |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.8 Информация, требуемая в К.7.3 (приложение К) |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.9 Транспортное средство предназначено для буксирования прицепов с электрическими тормозными системами, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.10 Транспортное средство оборудовано антиблокировочной системой, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.10.1 Транспортное средство соответствует требованиям приложения Н, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.10.2 Категория антиблокировочной системы: Категория 1/2/34, 6) Категория А/В4), 8) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.10.3 Транспортное средство приспособлено для буксирования прицепов, оборудованных антиблокировочными системами, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.10.4 Если протокол испытаний составлен по форме, соответствующей приложению Ф, - номер(а) протокола(ов): |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.11 Транспортное средство должно соответствовать требованиям приложения Г (ДОПОГ), да/нет1) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.11.1 Транспортное средство соответствует требованиям к эффективности тормозных систем длительного действия в испытании «Тип-IIА» при максимальной массе до ……т, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.11.2 Механическое транспортное средство оборудовано устройством, управляющим тормозной системой длительного действия прицепа, да/нет4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.11.3 Прицеп оборудован тормозной системой длительного действия, да/нет1) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.12 Транспортное средство оборудовано управляющей(ими) магистралью(ями) в соответствии с 5.1.3.1.1/5.1.3.1.2/5.1.3.1.34) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11.13 Необходимая документация к системе(ам) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
. . . . . . . . . . . . . . . . . . . . . . в соответствии с приложением У имеется, да/нет/неприменимо4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12 Дополнительная информация для использования при альтернативных испытаниях в соответствии с приложением X: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.1 Описание подвески: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.1.1 Изготовитель |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.1.2 Вид |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.1.3 Тип |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.1.4 Модель |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.2 Колесная база транспортного средства, подвергнутого испытаниям |
. . . . . . . . . . . . . . . . . . . . . мм |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12.3 Межосевой дифференциал в колесной тележке (если имеется) |
. . . . . . . . . . . . . . . . . . . . . . . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
13 Наличие прицепа, выдержавшего испытания в соответствии с приложением X, да/нет4). (Если да - необходимо представить данные, свидетельствующие о полном выполнении требований дополнения 2 к приложению X) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
14 Результаты испытаний: положительные /отрицательные /требуются дополнительные испытания4) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
15 Испытательная лаборатория, проводившая испытания на соответствие настоящему стандарту . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Руководитель испытательной лаборатории_______________________________________ Подпись инициалы, фамилия Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1) Если объектом испытаний является механическое транспортное средство. 2) При наличии раздаточной коробки. 3) Если объектом испытаний является прицеп. 4) Ненужное зачеркнуть. 5) Применимо только к прицепам категорий О3 и О4. 6) Применимо только к механическим транспортным средствам. 7) Применимо только к транспортным средствам категорий О2 и О3. 8) Применимо только к транспортным средствам категории О4. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Приложение В
(обязательное)
Тормозные испытания и эффективность тормозных систем
В.1 Тормозные испытания
В.1.1 Общие положения
В.1.1.1 Эффективность тормозных систем определяют измерением тормозного пути и соотнесением его с начальной скоростью ТС и/или измерением среднего значения предельного замедления в процессе испытания.
В.1.1.2 Тормозной путь определяют как расстояние, которое проходит ТС с момента, когда водитель начинает воздействовать на орган управления тормозной системы, до момента остановки ТС. Начальная скорость - это скорость ТС в момент, когда водитель начинает воздействовать на орган управления тормозной системы. Начальная скорость должна составлять не менее 98 % скорости, предписанной для данного испытания.
Среднее значение предельного замедления dm рассчитывают как замедление, осредненное в интервале скоростей от vb до ve, м/с2, по формуле
![]()
где v0 - начальная скорость ТС, км/ч;
vb = 0,8 v0, км/ч;
ve = 0,1 v0, км/ч;
sb - расстояние, проходимое ТС в интервале от v0 до vb, м;
se - расстояние, проходимое ТС в интервале от v0 до ve, м.
Скорости и расстояния определяют с помощью инструментов, обеспечивающих точность ± 1 % при предписанной для испытания скорости ТС. Среднее предельное замедление допускается определять методом иным, чем метод, связанный с измерением скоростей и расстояний. В этом случае точность среднего предельного замедления должна составлять ± 3 %.
В.1.2 Эффективность торможения любого ТС должна быть измерена в процессе дорожных испытаний при соблюдении следующих условий:
В.1.2.1 Характеристики массы ТС должны соответствовать предписанным для каждого типа испытаний и быть указаны в отчете.
В.1.2.2 Испытания должны быть проведены на скоростях, предписанных для каждого типа испытаний. Если максимальная конструктивная скорость ТС меньше, чем скорость, предписанная для данного испытания, испытание должно быть проведено на максимальной скорости ТС.
В.1.2.3 В процессе испытания усилие, приложенное к органу управления тормозной системой для обеспечения предписанной эффективности торможения, не должно превышать максимального усилия, установленного для категории ТС, к которой принадлежит испытуемое ТС.
В.1.2.4 Дорожное покрытие должно обеспечивать хорошее сцепление, если в соответствующих приложениях к настоящему стандарту не обусловлены специальные требования.
В.1.2.5 Испытания должны быть проведены при отсутствии ветра, воздействие которого может повлиять на результаты испытаний.
В.1.2.6 Перед началом испытаний шины должны быть холодными и иметь внутреннее давление, предписанное для шин при данной нагрузке и неподвижном ТС.
В.1.2.7 Предписанная эффективность торможения должна быть обеспечена при отсутствии блокировки колес, отклонения ТС от заданного курса и повышенной вибрации1).
______________
1) Блокировка колес допускается, если она особо обусловлена.
В.1.2.8 Для ТС, приводимых в движение, полностью или частично, электродвигателем (или электродвигателями), постоянно соединенным с колесами, все испытания должны быть проведены с подсоединенным электродвигателем (электродвигателями).
В.1.2.9 Для ТС, описанных в В.1.2.8, снабженных электрической рекуперативной системой категории А, испытания, выявляющие поведение ТС и описанные в В.1.4.3.1, должны быть проведены на поверхности, имеющей пониженный коэффициент сцепления [см. Н.5.2.2 (приложение Н)].
В.1.2.9.1 Кроме того, для ТС, снабженных электрической рекуперативной тормозной системой категории А, переходный режим при переключении передач или сбросе тяги не должен влиять на поведение ТС в условиях испытаний по В.1.2.9.
В.1.2.10 В процессе испытаний в соответствии с В.1.2.9 и В.1.2.9.1 блокировка колес не допускается. Однако допускается коррекция рулем при условии, что поворот рулевого колеса не превышает 120° в течение первых 2 с и не превышает 240° в целом.
В.1.2.11 В случае ТС с электрическим приводом рабочих тормозов, работающим от тяговых аккумуляторных батарей (или от вспомогательной батареи), которые получают энергию только от внешнего зарядного устройства, эти батареи должны в процессе испытания тормозной эффективности иметь средний запас электроэнергии, не более чем на 5 % превышающий уровень, при котором в соответствии с требованиями 5.2.1.27.6 должен активизироваться предупреждающий сигнал об отказе тормозов.
Если предупреждающий сигнал активизируется, допускается определенная подзарядка батарей в процессе испытания для поддерживания их заряда на требуемом уровне.
В.1.3 Поведение транспортного средства в процессе торможения
В.1.3.1 В тормозных испытаниях, особенно если их проводят на высоких скоростях, должны быть проверены основные особенности поведения ТС в процессе торможения.
В.1.3.2 Поведение транспортного средства в процессе торможения на дороге с пониженным коэффициентом сцепления
Поведение ТС категорий M1 M2, M3, N1, N2, N3, О2, О3 и О4 на дороге с пониженным коэффициентом сцепления должно соответствовать требованиям приложения К и/или приложения П.
В.1.3.2.1 Если тормозная система соответствует требованиям 5.2.1.7.2, когда торможение определенной оси (или осей) осуществляется тормозным моментом, состоящим более чем из одного составляющего момента, и каждый составляющий момент может изменяться по отношению к остальным, ТС должно удовлетворять требованиям приложения К или П при всех соотношениях тормозных моментов, которые могут иметь место при заданной стратегии торможения1).
____________
1) Изготовитель должен представить испытательной лаборатории комплект графиков торможения, допускаемых примененной стратегией автоматического управления.
В.1.4 Испытание «Тип-0» (обычное испытание эффективности тормозной системы при «холодных» тормозах)
В.1.4.1 Общие требования
В.1.4.1.1 Тормоза должны быть холодными. Тормоза считают холодными, если температура, измеренная на тормозном диске или на внешней поверхности тормозного барабана, менее 100 °С.
В.1.4.1.2 Испытание должно быть проведено в следующих условиях:
В.1.4.1.2.1 ТС должно быть в груженом состоянии, при этом распределение массы по осям должно соответствовать указаниям изготовителя. Если предусмотрено испытание при различных значениях вертикальных нагрузок на оси, распределение максимальной массы по осям должно быть таким, чтобы нагрузка на каждую ось была пропорциональна максимально допустимой нагрузке на соответствующую ось. Для тягачей, предназначенных для буксирования полуприцепов, нагрузка может быть приложена приблизительно на середине расстояния между шкворнем полуприцепа при упомянутых выше условиях нагружения и задней осью (осью качения задней тележки).
В.1.4.1.2.2 Каждое испытание должно быть повторено на порожнем ТС. В случае механического ТС на нем помимо водителя допускается присутствие на переднем сиденье второго лица, ответственного за регистрацию результатов испытания;
для тягача, предназначенного для буксирования полуприцепа, испытания при отсутствии нагрузки следует выполнять на одиночном ТС, включающем в себя массу сцепного устройства тягача (седла); следует включить также массу запасного колеса, если оно входит в стандартную комплектацию ТС;
на ТС, представляющее собой шасси с кабиной, допускается устанавливать дополнительную массу, чтобы создать массу конструкции, не превышающую минимальную массу, декларируемую изготовителем в соответствии с приложением Б;
для ТС, оборудованных электрической рекуперативной тормозной системой, требования к тормозам устанавливают в зависимости от категории установленной тормозной системы:
- для категории А - любой отдельный орган управления электрическим рекуперативным торможением не должен быть использован в процессе испытания «Тип-0»;
- для категории В - составляющая тормозная сила, возникающая в результате действия электрической рекуперативной тормозной системы, не должна превышать минимальный уровень, гарантируемый конструкцией системы.
Это требование считают выполненным, если аккумуляторные батареи имеют один из перечисленных ниже уровней заряда, которые определяют2) методом, описанным в дополнении 1 к настоящему приложению:
___________
2) По согласованию с испытательной лабораторией оценку уровня заряда не проводят для ТС, имеющих источник энергии для заряда тяговых батарей и средства регулирования уровня их заряда.
- максимальный уровень заряда, рекомендованный изготовителем в технической документации на ТС, или
- уровень, составляющий не менее 95 % уровня полного заряда, если изготовитель не предоставил соответствующих рекомендаций, или
- максимальный уровень, обеспечиваемый автоматическим управлением зарядкой аккумуляторных батарей на ТС.
В.1.4.1.2.3 Предписанные пределы минимальной эффективности торможения для испытаний порожнего и груженого ТС должны соответствовать указанным ниже значениям для каждой категории ТС; при этом ТС должно соответствовать предписанным значениям как тормозного пути, так и среднего предельного замедления для категории, к которой относится ТС, однако нет необходимости непосредственно измерять оба параметра.
В.1.4.1.2.4 Дорожная поверхность должна быть горизонтальной.
В.1.4.2 Испытания «Тип-0» с отсоединенным двигателем
Испытания должны быть выполнены на скорости, предписанной для той категории, к которой относится ТС, причем значения параметров, имеющих отношение к этим испытаниям, устанавливают с определенными допусками. В испытаниях должна быть достигнута минимальная эффективность торможения, предписанная для ТС соответствующей категории.
В.1.4.3 Испытания «Тип-0» с подсоединенным двигателем
В.1.4.3.1 Испытания должны быть выполнены на различных скоростях, минимальная скорость должна быть равна 30 % максимальной скорости ТС, а максимальная - 80 % этой скорости. Если ТС оборудовано ограничителем скорости, максимальную скорость, допускаемую этим ограничителем, принимают как максимальную скорость ТС. Должны быть измерены параметры, характеризующие реальную максимальную эффективность торможения, и в отчет об испытаниях должна быть внесена запись о поведении ТС в процессе торможения. Тягачи для буксирования полуприцепов, несущие нагрузку, имитирующую эффект воздействия груженого полуприцепа, не должны быть испытаны на скоростях, превышающих 80 км/ч.
В.1.4.3.2 Дальнейшие испытания должны быть выполнены с подсоединенным двигателем и при начальной скорости, предписанной для категории, к которой принадлежит ТС. В испытаниях должна быть достигнута минимальная эффективность торможения, предписанная для ТС каждой категории. Тягачи для буксирования полуприцепов, несущие нагрузку, имитирующую эффект воздействия груженого полуприцепа, не должны быть испытаны на скоростях, превышающих 80 км/ч.
В.1.4.4 Испытания «Тип-0» для транспортных средств категории О, оборудованных пневматическими тормозами
В.1.4.4.1 Тормозная эффективность прицепа может быть рассчитана или исходя из удельной тормозной силы комбинации буксирующего ТС и прицепа и измеренного усилия в сцепном устройстве, или, в определенных случаях, исходя из удельной тормозной силы комбинации буксирующего ТС и прицепа, при том что торможение осуществляется только прицепом. В процессе тормозных испытаний двигатель буксирующего ТС должен быть отсоединен от трансмиссии.
В случае, когда торможение осуществляется только прицепом, эффективность торможения с целью учесть влияние на торможение дополнительной массы оценивают по среднему значению предельного замедления.
В.1.4.4.2 За исключением случаев, указанных в В.1.4.4.3 и В.1.4.4.4, для определения удельной тормозной силы прицепа необходимо измерить удельную тормозную силу комбинации буксирующего ТС и прицепа и усилие в сцепном устройстве. Буксирующее ТС должно соответствовать требованиям к соотношению между ТМ/РМ и давлением рm, установленному в приложении К. Удельную тормозную силу прицепа рассчитывают по формуле
![]()
где zR - удельная тормозная сила прицепа;
zR+M - удельная тормозная сила комбинации буксирующего ТС и прицепа;
D - усилие в сцепном устройстве (растягивающее усилие - плюс D, сжимающее усилие - минус D);
PR - суммарная вертикальная статическая реакция дорожного полотна на колеса прицепа (см. приложение К).
В.1.4.4.3 Если прицеп (за исключением полуприцепа) имеет неразделенную или полуразделенную тормозную систему, где давление в тормозных камерах не изменяется в процессе торможения, несмотря на изменяющуюся динамическую нагрузку на ось, то допускается торможение одиночного прицепа. Допускается также торможение одиночного полуприцепа.
Удельную тормозную силу прицепа рассчитывают по формуле
![]()
где R - коэффициент сопротивления качению (R = 0,01);
РМ - суммарная вертикальная статическая реакция дорожной поверхности на колеса буксирующего ТС (см. приложение К).
В.1.4.4.4 Допускается рассчитывать удельную тормозную силу прицепа исходя из параметров торможения одиночного прицепа. В этом случае давление в тормозной системе должно быть такое же, как и измеренное в тормозных камерах в процессе торможения комбинации ТС.
В.1.5 Испытание «Тип-I» (испытание уменьшения эффективности торможения)
В.1.5.1 Многократное торможение
В.1.5.1.1 Рабочие тормозные системы всех механических ТС должны быть испытаны на соответствие предписанной эффективности торможения после определенного числа циклов торможения (циклов активизации и освобождения тормозов) груженого ТС в условиях, установленных в следующей таблице.
Таблица
|
Категория ТС |
Условия проведения испытаний |
|||
|
Начальная скорость торможения, v1, км/ч |
Скорость в конце торможения v2, км/ч |
Длительность цикла торможения 1) Δt, с |
Число циклов торможения п |
|
|
М1 |
80 % vmax ≤ 120 |
0,5v1 |
45 |
15 |
|
М2 |
80 % vmax ≤ 100 |
0,5v1 |
55 |
15 |
|
N1 |
80 % vmax ≤ 120 |
0,5v1 |
55 |
15 |
|
M3, N2, N3 |
80 % vmax ≤ 60 |
0,5v1 |
60 |
20 |
|
1) Отрезок времени между началом предыдущей активизации тормозов и началом последующей активизации. Примечание - vmax - максимальная скорость ТС. |
||||
В.1.5.1.2 Если характеристики ТС не позволяют обеспечить длительность одного цикла торможения, равную Δt, допускается увеличить эту длительность. В любом случае к каждому циклу, содержащему отрезок времени, необходимый для торможения и последующего разгона ТС, допускается добавлять 10 с для стабилизации скорости v1.
В.1.5.1.3 В этом испытании сила, приложенная к органу управления, должна быть отрегулирована так, чтобы обеспечить среднее значение предельного замедления, равное 3 м/с2 при первой активизации тормозов; эта сила должна оставаться неизменной при последующих активизациях тормозов.
В.1.5.1.4 В процессе активизации тормозов должна быть постоянно включена высшая передача (за исключением повышающей передачи и других подобных устройств).
В.1.5.1.5 Для восстановления начальной скорости v1, после торможения необходимо использовать коробку передач таким образом, чтобы эта скорость была достигнута за возможно более короткое время (т.е. с максимальным ускорением, обеспечиваемым двигателем и коробкой передач).
В.1.5.1.6 Для ТС, не обладающих достаточной автономией для выполнения циклов торможения с нагревом тормозов, испытание должно быть проведено следующим образом: перед первой активизацией тормозов необходимо достичь предписанной начальной скорости торможения, после прекращения торможения обеспечить максимально возможное ускорение для увеличения скорости, затем осуществить успешное торможение со скорости, достигнутой в конце цикла торможения, выполненного в установленный для ТС данной категории отрезок времени (см. В.1.5.1.1).
В.1.5.1.7 Если ТС оборудовано устройствами для автоматической регулировки тормозов, перед испытанием «Тип-I» должна быть выполнена предварительная регулировка тормозов в соответствии со следующими процедурами в зависимости от особенностей тормозной системы.
В.1.5.1.7.1 Если ТС оборудовано пневматическими тормозами, предварительная регулировка тормозов должна позволять функционировать автоматическим устройствам регулирования. С этой целью ход штока тормозной камеры s0 должен быть отрегулирован следующим образом:
s0 ≥ 1,1sre-adjust,
где sre-adjust - ход начала регулировки1), установленный изготовителем устройства автоматической регулировки тормозов.
____________
1) Ход, при котором начинается автоматическая регулировка тормозного зазора под давлением в тормозной камере, составляющим 15 % рабочего давления в тормозной системе, но не менее 1,0 бар.
При этом максимальное значение s0 не должно превышать значения, рекомендованного изготовителем.
Если по согласованию с испытательной лабораторией измерение хода штока тормозной камеры признано нецелесообразным, с испытательной лабораторией должна быть согласована иная первоначальная регулировка.
После выполнения указанных выше условий тормоза должны быть приведены в действие последовательно 50 раз при давлении в тормозных камерах, равном 30 % рабочего давления в тормозной системе, но не менее 2,0 бар. Перед этим должна быть осуществлена одноразовая активизация тормозов при давлении в тормозной камере не менее 6,5 бар.
В.1.5.1.7.2 Если ТС оборудовано гидравлическими дисковыми тормозами, регулировка тормозов не требуется.
В.1.5.1.7.3 Если ТС оборудовано гидравлическими барабанными тормозами, регулировка тормозов определяется изготовителем.
В.1.5.1.8 Для ТС, оборудованных электрической рекуперативной тормозной системой категории В, состояние аккумуляторных батарей ТС в начале испытания должно быть таким, чтобы параметры электроэнергии, вырабатываемой рекуперативной тормозной системой при генерировании тормозной силы, не превышали бы минимума, гарантируемого конструкцией системы.
Это требование считают выполненным, если аккумуляторные батареи находятся на одном из уровней заряда для таких ТС, перечисленных в В.1.4.1.2.2.
В.1.5.2 Неразделенное торможение (см. 2.9)
В.1.5.2.1 Рабочие тормоза прицепов категорий О2 и О3 должны быть испытаны таким образом, чтобы на груженом ТС энергия, подводимая к тормозам, была эквивалентна энергии, измеренной в тот же отрезок времени на груженом ТС, перемещаемом при постоянной скорости 40 км/ч на дистанции 1,7 км с дорожным уклоном 7 %.
В.1.5.2.2 Испытание может быть проведено на горизонтальном участке дороги на прицепе, буксируемом тягачом. В процессе испытания сила, приложенная к органу управления, должна быть отрегулирована так, чтобы поддерживать сопротивление качению прицепа постоянным (сила сопротивления качению должна быть равна 7 % максимальной статической осевой нагрузки прицепа). Если мощность, необходимая для движения, при этих условиях не может быть достигнута, допускается проводить испытание при меньшей скорости, но на более протяженной дистанции в соответствии с таблицей.
Таблица
|
Скорость, км/ч |
Дистанция, м |
|
40 |
1700 |
|
30 |
1950 |
|
20 |
2500 |
|
15 |
3100 |
В.1.5.2.3 Если прицеп оборудован устройством для автоматической регулировки тормозов, предварительная регулировка тормозов перед испытанием «Тип-I» должна быть выполнена в соответствии с В.1.7.1.1.
В.1.5.3 Эффективность торможения при «горячих» тормозах
В.1.5.3.1 В конце испытания «Тип-I» (испытания, проводимого в соответствии с В.1.5.1 или В.1.5.2) необходимо определить эффективность рабочего торможения при тех же условиях, что и в испытании «Тип-0» с отсоединенным двигателем. Особенное внимание следует обратить на создание постоянного усилия на органе управления, значение которого не должно превышать среднего значения усилия, фактически приложенного в испытании «Тип-0». При этом температурные условия могут не совпадать.
В.1.5.3.1.1 Для механических ТС эффективность торможения при «горячих» тормозах должна составлять не менее 80 % эффективности, предписанной для соответствующей категории ТС, и не менее 60 % эффективности, полученной в испытании «Тип-0» при отсоединенном двигателе.
В.1.5.3.1.2 На ТС, укомплектованных электрической рекуперативной тормозной системой категории А, должна быть постоянно включена высшая передача. Если на ТС имеется отдельный орган управления электрической рекуперативной тормозной системой, то он не должен быть использован.
В.1.5.3.1.3 На ТС, укомплектованных электрической рекуперативной тормозной системой категории В, после выполнения циклов прогрева, описанных в В.1.5.1.6, испытание эффективности торможения при «горячих» тормозах должно быть выполнено при максимальной скорости, которая может быть достигнута ТС в конце тормозных циклов прогрева, если невозможно достичь скорости, предписанной в В.1.4.2.
Для сопоставления тормозной эффективности испытание «Тип-0» при «холодных» тормозах должно быть повторено при той же начальной скорости и в тех же условиях использования электрического рекуперативного торможения, которые были определены для соответствующего уровня заряда аккумуляторной батареи при испытании при «горячих» тормозах.
Допускается восстановление тормозных накладок перед началом испытания по сравнению эффективности вторичного торможения при «холодных» тормозах и торможения при «горячих» тормозах при соблюдении критериев В.1.5.3.1.1 и В.1.5.3.2.
В.1.5.3.1.4 Однако для прицепов тормозная сила на колесах при «горячих» тормозах и начальной скорости 40 км/ч должна составлять не менее 36 % максимальной статической нагрузки на колеса и не менее 60 % тормозной силы, полученной в испытании «Тип-0» при той же начальной скорости.
В.1.5.3.2 В случае механического ТС, удовлетворяющего требованию обеспечения 60 % эффективности торможения, но не удовлетворяющего требованию обеспечения 80 % эффективности торможения по В.1.5.3.1.1, дальнейшее проведение испытания при «горячих» тормозах может быть осуществлено при усилии на органе управления, не превосходящем установленное в разделе В.2 для ТС соответствующей категории. Результаты обоих испытаний должны быть отражены в протоколе.
В.1.5.4 Испытание на свободное качение
Если механические ТС оборудованы устройствами автоматической регулировки тормозов, тормозам после завершения испытаний, описанных в В.1.5.3, необходимо позволить остыть до температуры, характерной для «холодных» тормозов (не более 100 °С), после чего убедиться, что тормоза ТС полностью отпущены, одним из следующих способов:
а) проверкой свободного вращения колес (допускается проворачивание колеса вручную);
б) движением ТС с постоянной скоростью v = 60 км/ч при отпущенных тормозах. Если температура тормозных барабанов/дисков при этом не превосходит 80 °С, остаточные тормозные моменты на колесах считают допустимыми.
В.1.6 Испытание «Тип-II» (торможение на спуске)
В.1.6.1 Груженые ТС должны быть испытаны таким образом, чтобы поглощаемая энергия была эквивалентна поглощаемой энергии, измеренной за тот же отрезок времени на груженом ТС, движущемся со средней скоростью 30 км/ч по дороге с уклоном 6 % на дистанции 6 км при включенной соответствующей передаче в коробке передач и активизированной тормозной системе длительного действия (если ТС снабжено такой системой). Должна быть включена такая передача, чтобы частота вращения двигателя, измеренная в минутах в минус первой степени, не превышала максимального значения, предписанного изготовителем.
В.1.6.2 Для ТС, в которых кинетическая энергия поглощается только в результате торможения двигателем, допускается отклонение значения скорости движения ± 5 км/ч от предписанного среднего значения, при этом должна быть включена передача, на которой скорость движения на дороге с уклоном 6 % стабилизируется при ее значении, максимально близком к 30 км/ч. Если эффективность торможения двигателем определяют измерением замедления, то следует считать достаточным значение замедления не менее 0,5 м/с2.
В.1.6.3 В заключительной стадии испытания должны быть проведены измерения эффективности рабочей тормозной системы в тех же условиях, что приняты для испытания «Тип-0» при отсоединенном двигателе. При этом температурные условия могут отличаться. Эта эффективность при «горячих» тормозах должна обеспечивать значения тормозного пути s, не превышающие значения, указанные ниже, и средние значения предельного замедления dm, не меньшие, чем значения, указанные ниже, при усилии на органе управления, не превышающем 70 даН:
- для ТС категории М3 ![]()
(второе слагаемое соответствует dm = 3,75 м/с2);
- для ТС категории N3 ![]()
(второе слагаемое соответствует dm = 3,3 м/с2),
где v - начальная скорость торможения, км/ч.
В.1.6.4 ТС, упомянутые в В.1.8.1.1, В.1.8.1.2 и В.1.8.1.3, должны удовлетворять требованиям, соответствие которым проверяют в испытании «Тип-IIА» (см. В.1.8), вместо требований, соответствие которым проверяют в испытании «Тип-II».
В.1.7 Испытание «Тип-III» (испытание на уменьшение эффективности торможения для ТС категории О4)
В.1.7.1.1 Перед испытанием «Тип-III», описанным ниже, необходимо выполнить регулировку тормозов, процедура которой, применительно к соответствующему случаю, установлена в одном из пунктов В.1.7.1.1.1-В.1.7.1.1.3.
В.1.7.1.1.1 Для прицепов, оборудованных пневматическими тормозами, предварительная регулировка тормозов должна быть такой, чтобы обеспечить функционирование устройств автоматической регулировки тормозов. Для этого ход штока тормозной камеры s0 должен быть отрегулирован так, чтобы:
s0 ≥ 1,1sre-adjust,
где sre-adjust - ход начала регулировки 1), установленный изготовителем устройства автоматической регулировки тормозов.
____________
1) Ход, при котором начинается автоматическая регулировка тормозного зазора под давлением в тормозной камере, составляющим 15 % рабочего давления в тормозной системе, но не менее 1,0 бар.
При этом максимальное значение s0 не должно превышать значение, рекомендованное изготовителем.
Если по согласованию с испытательной лабораторией измерение хода штока тормозной камеры признано нецелесообразным, с испытательной лабораторией должна быть согласована иная первоначальная регулировка.
После выполнения указанных выше условий тормоза должны быть приведены в действие последовательно 50 раз при давлении в тормозных камерах, равном 30 % рабочего давления в тормозной системе, но не менее 2,0 бар. Перед этим должна быть осуществлена одноразовая активизация тормозов при давлении в тормозной камере не менее 6,5 бар.
В.1.7.1.1.2 Если ТС оборудовано гидравлическими дисковыми тормозами, регулировка тормозов не требуется.
В.1.7.1.1.3 Если ТС оборудовано гидравлическими барабанными тормозами, регулировка тормозов определяется изготовителем.
В.1.7.1.2 Для дорожных испытаний необходимо выполнить следующие условия:
|
Число тормозных циклов |
20 |
|
Длительность тормозного цикла |
60 с |
|
Начальная скорость торможения |
60 км/ч |
|
Особенности активизации тормозов |
В данных испытаниях усилие, приложенное к органу управления, должно быть отрегулировано так, чтобы обеспечить на прицепе массой PR при первой активизации тормозов среднее значение предельного замедления dm = 3 м/с2. Это усилие должно оставаться постоянным при активизации тормозов во всех последующих циклах |
Удельную тормозную силу прицепа zR рассчитывают по формуле, аналогичной приведенной в В.1.4.4.3:
![]()
Скорость в конце торможения (см. 3.1.5 дополнения 2 к приложению Л):
где zR - удельная тормозная сила прицепа;
zR+M - удельная тормозная сила комбинации ТС;
R - коэффициент сопротивления качению (R = 0,1);
Рм - масса, эквивалентная вертикальной статической реакции на колесах автомобиля-тягача, кг;
PR - масса, эквивалентная вертикальной статической реакции на колесах прицепа, кг;
Р1 - часть массы прицепа, приходящаяся на незатормаживаемую ось (оси), кг;
Р2 - часть массы прицепа, приходящаяся на затормаживаемую ось(оси), кг;
v1 - начальная скорость торможения, км/ч;
v2 - конечная скорость торможения, км/ч.
В.1.7.2 Эффективность торможения при «горячих» тормозах
По окончании испытания, проведенного в соответствии с В.1.7.1, необходимо измерить эффективность рабочей тормозной системы в тех же условиях, что для испытаний «Тип-0», но в отличающемся температурном режиме и при начальной скорости торможения 60 км/ч. В этом случае тормозная сила на колесах при «горячих» тормозах должна составлять не менее 40 % максимальной статической нагрузки на колеса и не менее 60 % значения, зафиксированного в испытании «Тип-I» при той же начальной скорости.
В.1.7.3 Испытания на свободное качение
После завершения испытаний, описанных в В.1.7.2, тормозам необходимо позволить остыть до температуры, характерной для «холодных» тормозов (не более 100 °С), а затем убедиться одним из следующих способов, что реализуется свободное качение прицепа:
а) проверкой свободного вращения колес (когда колеса можно провернуть вручную);
б) буксированием прицепа с постоянной скоростью v = 60 км/ч при отпущенных тормозах. Если асимптотическая температура тормозных барабанов/дисков при этом не превосходит 80 °С, остаточные тормозные моменты на колесах считают допустимыми.
В.1.8 Испытание «Тип-IIА» (эффективность торможения тормозной системой длительного действия)
В.1.8.1 Испытанию «Тип-IIА» подлежат ТС следующих категорий:
В.1.8.1.1 городские автобусы и автобусы дальнего следования категории М3;
В.1.8.1.2 ТС категории N3, официально допущенные к буксированию прицепов категории O4. Если максимальная масса превышает 26 т, масса ТС в испытании ограничивается значением 26 т, если же масса порожнего ТС превышает 26 т, масса ТС, которую необходимо учитывать, определяется соответствующим расчетом;
В.1.8.1.3 некоторые ТС, на которые распространяется ДОПОГ (см. приложение Г) [6].
В.1.8.2 Условия проведения испытания и требования к эффективности торможения
В.1.8.2.1 Эффективность тормозной системы длительного действия должна быть испытана при максимальной массе ТС или комбинации ТС.
В.1.8.2.2 Груженые ТС должны быть испытаны таким образом, чтобы поглощаемая энергия была эквивалентна поглощаемой энергии, зафиксированной за тот же отрезок времени на груженом ТС, движущемся со средней скоростью 30 км/ч по дороге с уклоном 7 % на дистанции 6 км. В процессе испытания рабочая, запасная и стояночная тормозные системы не должны активизироваться. Должна быть включена такая передача, чтобы частота вращения двигателя, в минутах в минус первой степени, не превышала максимальное значение, предписанное изготовителем. Допускается использование встроенной тормозной системы длительного действия при условии, что при ее функционировании не активизируется рабочая тормозная система. Выполнение этого условия можно проверить, убедившись, что рабочие тормоза остаются в «холодном» состоянии (см. В.1.4.1.1).
В.1.8.2.3 Для ТС, в которых энергия поглощается только в результате торможения двигателем, допускается отклонение скорости движения ± 5 км/ч от среднего значения, при этом должна быть включена передача, на которой скорость движения по дороге с уклоном 7 % стабилизируется при ее значении, максимально близком к 30 км/ч. Если эффективность торможения, осуществляемого исключительно двигателем, определяют измерением замедления, то следует считать достаточным значение замедления не менее 0,6 м/с2.
В.2 Эффективность тормозных систем транспортных средств категорий М и N
В.2.1 Рабочая тормозная система
В.2.1.1 Рабочие тормоза ТС категорий М и N должны быть испытаны при условиях, представленных в таблице.
Таблица
|
Параметр |
Категория ТС |
|||||||||
|
М1 |
М2 |
М3 |
N1 |
N2 |
N3 |
|||||
|
Усилие на органе управления F, даН, не более |
50 |
70 |
||||||||
|
Параметр |
Категория ТС |
|||||||||
|
М1 |
М2 |
М3 |
N1 |
N2 |
N3 |
|||||
|
Испытания |
||||||||||
|
Параметр |
«Тип-01)», «Тип-I» |
«Тип-01)», «Тип-I» |
«Тип-01)», «Тип-I», «Тип-II» или «Тип-IIА» |
«Тип-01)», «Тип-I» |
«Тип-01)», «Тип-I» |
«Тип-01)», «Тип-I», «Тип-II» |
||||
|
Начальная скорость торможения v, км/ч |
80 |
60 |
60 |
80 |
60 |
60 |
||||
|
Тормозной путь s, м, не более |
|
|
||||||||
|
Среднее значение предельного замедления dm, м/с2, не менее |
5,8 |
5,0 |
||||||||
|
Испытание «Тип-0» с подсоединенным двигателем |
||||||||||
|
Начальная скорость торможения v, км/ч |
80 % максимальной скорости ТС (vmax), но не более |
|||||||||
|
160 |
100 |
90 |
120 |
100 |
90 |
|||||
|
Тормозной путь s, м, не более |
|
|
||||||||
|
Среднее значение предельного замедления dm, м/с2, не менее |
5,0 |
4,0 |
||||||||
|
1) С отсоединенным двигателем. |
||||||||||
В.2.1.2 Если механическое ТС официально допущено к буксированию прицепа, не имеющего тормозов, минимальная эффективность торможения, предписанная для механических ТС соответствующей категории (в испытании «Тип-0» с отсоединенным двигателем), должна быть достигнута в сцепке с прицепом, не имеющим тормозов. При этом прицеп должен быть загружен до своей максимальной массы, декларируемой изготовителем механического ТС. Однако для ТС категории М1 минимальная эффективность торможения комбинации ТС должна быть не менее 5,4 м/с2 как в груженом, так и в порожнем состоянии.
Эффективность торможения комбинации ТС должна быть проверена расчетом, исходящим из максимальной эффективности торможения, реально достигнутой груженым одиночным механическим ТС в процессе испытания «Тип-0» с отсоединенным двигателем, с использованием приведенной ниже формулы. (При этом не требуется проводить реальное испытание комбинации ТС, включающей в себя прицеп, не имеющий тормозов.)
![]()
где dM+R - расчетное среднее максимальное замедление комбинации автомобиля-тягача и прицепа, не имеющего тормозов, м/с2;
dM - наивысшее значение среднего максимального замедления одиночного автомобиля-тягача, достигнутое в процессе испытания «Тип-0» при отсоединенном двигателе, м/с2;
РМ - масса автомобиля-тягача, кг;
PR - максимальная масса прицепа, не имеющего тормозов, которая допускается изготовителем механического ТС, кг.
В.2.2 Запасная тормозная система
В.2.2.1 Запасная тормозная система, даже если орган управления, активизирующий ее, используется также и для выполнения других функций, связанных с торможением, должна обеспечивать значения тормозного пути s, не превышающие значения, указанные ниже, и средние значения предельного замедления dm, не меньшие, чем значения, указанные ниже:
- для ТС категории М1 ![]()
(второе слагаемое соответствует dm = 2,9 м/с2);
- для ТС категории М2, М3 ![]()
(второе слагаемое соответствует dm = 2,5 м/с2);
- для ТС категории N ![]()
(второе слагаемое соответствует dm = 2,2 м/с2),
где v - начальная скорость торможения, км/ч.
В.2.2.2 Если орган управления приводится в действие рукой, предписанная эффективность торможения должна быть обеспечена приложением к органу управления силы, не превышающей 40 даН для ТС категории М1 и 60 даН для других ТС, и орган управления должен быть расположен так, чтобы водитель мог быстро и легко привести его в действие.
В.2.2.3 Эффективность запасной тормозной системы должна быть проверена в испытании «Тип-0» при отсоединенном двигателе и следующих начальных скоростях торможения:
|
Категория ТС |
Начальная скорость торможения v, км/ч |
Категория ТС |
Начальная скорость торможения v, км/ч |
|
М1 |
80 |
N1 |
70 |
|
М2 |
60 |
N2 |
50 |
|
М3 |
60 |
N3 |
40 |
В.2.2.4 Испытание по определению эффективности запасного торможения необходимо проводить, моделируя реальную ситуацию возникновения неисправности в рабочей тормозной системе.
В.2.2.5 Для ТС, использующих электрические рекуперативные тормозные системы, тормозную эффективность необходимо дополнительно испытать в условиях возникновения следующих неисправностей:
В.2.2.5.1 при полном отказе электрической составляющей действия запасной тормозной системы;
В.2.2.5.2 когда неисправность вызывает действие электрической составляющей в режиме максимальной тормозной силы.
В.2.3 Стояночная тормозная система
В.2.3.1 Стояночная тормозная система должна удерживать груженое ТС в неподвижном состоянии на подъеме (уклоне) 18 %. Это требование должно быть выполнено и в том случае, когда стояночная тормозная система совмещена с какой-либо другой тормозной системой.
В.2.3.2 На ТС, допущенных к эксплуатации с прицепами, стояночная тормозная система буксирующего ТС должна удерживать комбинацию ТС в неподвижном состоянии на подъеме (уклоне) 12 %.
В.2.3.3 Если стояночная тормозная система имеет ручной орган управления, приложенная к нему сила не должна превышать 40 даН для ТС категории М1 и 60 даН для ТС всех других категорий.
В.2.3.4 Если стояночная тормозная система имеет ручной орган управления, приложенная к нему сила не должна превышать 50 даН для ТС категории М1 и 70 даН для ТС всех других категорий.
В.2.3.5 Допустимо использование стояночной тормозной системы, которую необходимо активизировать несколько раз, чтобы она достигла предписанной эффективности.
В.2.3.6 Для проверки соответствия стояночной тормозной системы требованиям, установленным в 5.2.1.2.4, необходимо провести испытание «Тип-0» с отсоединенным двигателем при начальной скорости 30 км/ч. Среднее максимальное замедление на отрезке времени после приложении усилия к органу управления стояночной тормозной системы и до момента непосредственно перед остановкой ТС должно быть не менее 1,5 м/с2. Испытание должно быть проведено на груженом ТС.
Усилие, приложенное к органу управления, не должно превосходить установленные значения.
В.2.4 Остаточное торможение после возникновения неисправности в тормозном приводе
В.2.4.1 Остаточное торможение
Остаточное торможение рабочей тормозной системы в случае возникновения неисправности в какой-либо части ее привода должно обеспечивать значения тормозного пути s, не превышающие значения, определяемые по формулам (см. таблицу ниже), и средние значения предельного замедления dm не меньшие, чем значения, указанные в той же таблице, при усилии на органе управления, не превышающем 70 даН. Эффективность остаточного торможения проверяют в испытании «Тип-0» при отсоединенном двигателе и начальных скоростях торможения, указанных в таблице.
Таблица - Параметры остаточного торможения для рабочей тормозной системы
|
Категория ТС |
Начальная скорость торможения v, км/ч |
Груженое ТС |
Порожнее ТС |
||
|
Тормозной путь s, м, не более |
Среднее максимальное замедление dm, м/с2, не менее |
Тормозной путь s, м, не более |
Среднее максимальное замедление dm, м/с2, не менее |
||
|
М1 |
80 |
|
1,7 |
|
1,5 |
|
М2 |
60 |
|
1,5 |
|
1,3 |
|
М3 |
60 |
|
1,5 |
|
1,5 |
|
N1 |
70 |
|
1,3 |
|
1,1 |
|
N2 |
50 |
|
1,3 |
|
1,1 |
|
N3 |
40 |
|
1,3 |
|
1,3 |
В.2.4.2 Испытание эффективности остаточного торможения должно быть проведено моделированием возникновения реальной неисправности в рабочей тормозной системе.
В.3 Эффективность тормозных систем транспортных средств категории О
В.3.1 Рабочая тормозная система
В.3.1.1 Условия, касающиеся испытаний транспортных средств категории О1
Если применение рабочей тормозной системы является обязательным, эффективность этой системы должна соответствовать требованиям, установленным для ТС категорий О2 и О3.
В.3.1.2 Условия, касающиеся испытаний транспортных средств категорий О2 и О3
В.3.1.2.1 Если применяют рабочую тормозную систему неразделенного или полуразделенного типа, сумма тормозных сил на периферии заторможенных колес должна составлять не менее х % максимальной статической вертикальной реакции на колесах, где х имеет следующие значения:
|
Транспортное средство |
х, % |
|
Полный прицеп, груженый и порожний |
50 |
|
Полуприцеп, груженый и порожний |
45 |
|
Прицеп с центральной осью, груженый и порожний |
50 |
В.3.1.2.2 Если на прицепе установлена пневматическая тормозная система, давление в питающей магистрали в процессе тормозного испытания должно быть не более 7 бар, а сигнал в управляющей магистрали в зависимости от характера отбора и обработки сигнала не должен превышать следующие значения:
а) 6,5 бар в пневматической управляющей магистрали;
б) значение эквивалентного дискретного сигнала, соответствующее 6,5 бар, в электрической управляющей магистрали [2].
Испытание проводят при скорости 60 км/ч. Кроме того, необходимо провести дополнительное испытание при скорости 40 км/ч на груженом прицепе для сравнения результатов с результатами испытания «Тип-I».
В.3.1.2.3 Если применяют тормозную систему инерционного типа, то она должна соответствовать требованиям приложения М.
В.3.1.2.4 Дополнительно ТС должны быть подвергнуты испытанию «Тип-I».
В.3.1.2.5 В испытаниях «Тип-I» полуприцепа масса, приходящаяся на затормаживаемую ось (оси), должна соответствовать максимальной нагрузке на эту ось (оси), т.е. не учитывать нагрузку на шкворень сцепного устройства.
В.3.1.3 Условия, касающиеся испытаний транспортных средств категории О4
В.3.1.3.1 Если применяют рабочую тормозную систему неразделенного или полуразделенного типа, сумма тормозных сил на периферии заторможенных колес должна составлять не менее х % максимальной статической вертикальной реакции на колесах, где х имеет следующие значения:
|
Транспортное средство |
х, % |
|
Полный прицеп, груженый и порожний |
50 |
|
Полуприцеп, груженый и порожний |
45 |
|
Прицеп с центральной осью, груженый и порожний |
50 |
В.3.1.3.2 Если на прицепе установлена пневматическая тормозная система, давление в управляющей магистрали в процессе тормозного испытания должно быть не более 6,5 бар, а давление в питающей магистрали - не более 7,0 бар. Скорость должна составлять 60 км/ч.
В.3.1.3.3 Дополнительно ТС должны быть подвергнуты испытанию «Тип-III».
В.3.1.3.4 В испытании «Тип-III» полуприцепа масса, приходящаяся на затормаживаемую ось (оси), должна соответствовать максимальной нагрузке на эту ось (оси).
В.3.2 Стояночная тормозная система
В.3.2.1 Стояночная тормозная система, установленная на прицепе, должна удерживать груженый прицеп, отсоединенный от буксирующего ТС, в неподвижном состоянии на подъеме (уклоне) 18 %. Усилие, приложенное к органу управления, при этом не должно превышать 60 даН.
8.3.3 Автоматическая тормозная система
В.3.3.1 Эффективность автоматического торможения в случае возникновения неисправности, как описано в 5.2.1.18.3, в процессе тормозного испытания груженого ТС при начальной скорости 40 км/ч должна соответствовать тормозной силе, составляющей не менее 13,5 % максимальной статической нагрузки на колеса. Допускается блокировка колес при эффективности торможения, превышающей 13,5 %.
В.4 Время реакции
В.4.1 Если ТС оборудовано рабочей тормозной системой, полностью или частично зависящей от источника энергии иного, чем мускульная энергия водителя, должны быть выполнены следующие требования:
В.4.1.1 При экстренном торможении отрезок времени между моментом начала активизации органа управления и моментом, когда тормозная сила на наименее благоприятно расположенной оси достигает уровня, соответствующего предписанной эффективности торможения, должен быть не более 0,6 с.
В.4.1.2 Для ТС, оборудованных пневматическими тормозными системами, требования В.4.1.1 считают выполненными, если ТС соответствует требованиям приложения Д.
В.4.1.3 Для ТС, оборудованных гидравлическими тормозными системами, требования В.4.1.1 считают выполненными, если при экстренном торможении замедление ТС или давление в наименее благоприятно расположенном колесном тормозном цилиндре достигает уровня, соответствующего предписанной эффективности торможения, за отрезок времени, не превышающий 0,6 с.
Дополнение 1
к приложению В
Метод контроля уровня заряда аккумуляторной батареи
Метод применим к аккумуляторным батареям ТС, используемым для создания тягового усилия и рекуперативного торможения.
Метод требует использования двунаправленного ваттметра постоянного тока.
1 Описание метода
1.1 Новые или не использовавшиеся длительное время батареи необходимо подвергнуть циклической зарядке в соответствии с рекомендациями изготовителя. После завершения процесса зарядки необходимо обеспечить выдержку батарей при наружной температуре в течение не менее 8 ч.
1.2 Полная зарядка должна быть осуществлена с использованием метода зарядки, рекомендованного изготовителем.
1.3 При проведении тормозных испытаний в соответствии с В.1.2.11, В.1.4.1.2.2, В.1.5.1.6 и В.1.5.3.1.3 текущий баланс электроэнергии, расходуемой тяговыми электродвигателями и накапливаемой при работе рекуперативной тормозной системы, регистрируют в ватт-часах. Затем значение этой энергии используют для определения уровня заряда в начале или конце конкретного испытания.
1.4 Чтобы восстановить уровень заряда аккумуляторных батарей для проведения сравнительных испытаний, например таких, какие описаны в В.1.5.3.1.3, батареи должны быть либо вновь заряжены до необходимого уровня, либо заряжены до более высокого уровня и затем разряжены при фиксированной нагрузке и приблизительно постоянной мощности до требуемого уровня заряда.
Альтернативно на ТС с аккумуляторными батареями, используемыми только для создания тягового усилия, уровень заряда может быть восстановлен в процессе движения ТС. Испытания, проводимые с использованием аккумуляторной батареи, имеющей неполный заряд перед их началом, должны быть начаты как можно быстрее после того, как будет достигнут требуемый уровень заряда.
Приложение Г
(обязательное)
Дополнительные требования, устанавливаемые Европейским соглашением о международной дорожной перевозке опасных грузов к транспортным средствам, предназначенным для перевозки опасных грузов
Г.1 Область распространения
Настоящее приложение распространяется на ТС, к которым Европейское соглашение о международной дорожной перевозке опасных грузов (ДОПОГ) 1) предъявляет специальные требования, касающиеся эффективности АБС и тормозных систем длительного действия.
________
1) См. [6].
Г.2 Технические требования
Г.2.1 Общие требования
Механические ТС и прицепы, предназначенные для перевозки опасных грузов, должны соответствовать распространяющимся на них требованиям настоящего стандарта. Кроме того, должны быть выполнены там, где это применимо, следующие требования.
Г.2.2 Антиблокировочная система прицепов
Г.2.2.1 Прицепы категории 04 должны быть оборудованы АБС категории А в соответствии с приложением Н.
Г.2.3 Тормозная система длительного действия
Г.2.3.1 Механические ТС, максимальная масса которых превышает 16 т, и механические ТС, официально допущенные к буксированию прицепа категории 04, должны быть укомплектованы тормозной системой длительного действия, определяемой в 2.15 настоящего стандарта и удовлетворяющей следующим требованиям.
Г.2.3.1.1 Конфигурация органа управления торможением длительного действия должна соответствовать одному из типов, описанных в 2.15.2.1 - 2.15.2.3.
Г.2.3.1.2 В случае возникновения неисправности в АБС встроенная или комбинированная тормозная система длительного действия должна автоматически отключаться.
Г.2.3.1.3 Эффективность тормозной системы длительного действия должна регулироваться с помощью АБС так, чтобы ось (оси), затормаживаемая под воздействием АБС, не могла бы блокироваться на скорости, превышающей 15 км/ч. Однако это требование не должно быть применено к составляющей длительного торможения, создаваемой обычным торможением двигателем.
Г.2.3.1.4 Тормозная система длительного действия должна обеспечивать несколько ступеней эффективности торможения, включая низшую ступень, предназначенную для порожнего ТС. Если тормозная система длительного действия механического ТС определяется его двигателем, то считают, что различные передаточные числа коробки передач создают различные ступени эффективности торможения.
Г.2.3.1.5 Эффективность торможения тормозной системы длительного действия должна быть такой, чтобы она соответствовала требованиям В.1.8 [приложение В (испытания «Тип-IIА»)] при массе груженого ТС, включающей в себя массу механического ТС и массу прицепа, к буксировке которого это механическое ТС официально допущено, но не превышающей 44 т.
Г.2.3.2 Если прицеп оборудован тормозной системой длительного действия, эта система должна соответствовать требованиям Г.2.3.1.1 - Г.2.3.1.4 в зависимости от особенностей ее конструкции.
Приложение Д
(обязательное)
Метод измерения времени реакции транспортных средств, оборудованных пневматическими тормозными системами
Д.1 Общие требования
Д.1.1 Время реакции рабочей тормозной системы должно быть определено на неподвижном ТС, при этом давление должно быть измерено на входе в тормозной цилиндр наименее благоприятно расположенного тормоза. В случае ТС, оборудованных комбинированными гидравлическими/пневматическими тормозными системами, давление допускается измерять у отверстия наименее благоприятно расположенного пневматического агрегата. На ТС, оборудованных клапанами, чувствительными к нагрузке, эти устройства должны быть установлены в положении «нагрузка».
Д.1.2 В процессе испытания значения ходов в тормозных цилиндрах различных осей должны быть такими, какие требуются для тормозов, отрегулированных с минимально возможным зазором.
Д.1.3 Значения времени реакции, определенные в соответствии с требованиями настоящего приложения, должны быть округлены до ближайшей десятой доли секунды. Если значение сотой доли секунды равно пяти или более, значение времени реакции должно быть округлено до ближайшей большей десятой доли секунды.
Д.2 Механические транспортные средства
Д.2.1 В начальный момент каждого испытания давление в аккумуляторе энергии должно быть равным давлению, при котором регулятор восстанавливает подачу энергопитания в систему. В системах, не оборудованных регулятором (например, компрессорах с ограничителями давления), давление в устройстве для накопления энергии в начальный момент каждого испытания должно составлять 90 % давления, установленного изготовителем и указанного в Е.1.1.2.2.1 (приложение Е) применительно к испытаниям, описанным в этом приложении.
Д.2.2 Время реакции, будучи функцией времени активизации tf, должно определяться последовательностью элементарных периодов времени полных активизаций, начинающейся с минимально возможного периода времени активизации и возрастающего приблизительно до 0,4 с. Значения измеренных величин должны быть представлены на графике.
Д.2.3 Время реакции, которое следует учитывать в испытании, - это время, соответствующее времени активизации 0,2 с. Время реакции может быть определено по графику с помощью интерполяции.
Д.2.4 Для времени активизации 0,2 с отрезок времени с момента начала активизации органа управления тормозной системы до момента, когда давление в тормозном цилиндре достигло 75 % его асимптотического значения, не должно превышать 0,6 с.
Д.2.5 В случае механических ТС, снабженных пневматической управляющей магистралью для прицепов, время реакции, в дополнение к требованиям Д.1.1, должно быть измерено на дальнем торце шланга длиной 2,5 м и внутренним диаметром 13 мм, который подсоединяется к соединительной головке управляющей магистрали рабочей тормозной системы. В процессе этого испытания к соединительной головке питающей магистрали должен быть подсоединен резервуар объемом (385 ± 5) см3 (подразумевается, что этот объем эквивалентен объему шланга длиной 2,5 м и внутренним диаметром 13 мм, находящегося под давлением 6,5 бар). Тягачи, предназначенные для буксирования полуприцепов, должны быть укомплектованы гибкими шлангами для соединения с полуприцепами. Следовательно, соединительные головки будут расположены на дальних торцах этих гибких шлангов. Данные о длине и внутреннем диаметре шлангов должны быть размещены в 11.7 «Приложения к протоколу испытаний...» (см. приложение Б).
Д.2.6 Отрезок времени от момента начала воздействия на тормозную педаль до момента, когда:
а) давление, измеренное на соединительной головке пневматической управляющей магистрали, или
б) соответствующее цифровое значение в электрической управляющей магистрали [1], [2] - достигает х % своего асимптотического, условно-конечного значения, не должен превосходить значений, указанных в таблице.
Таблица
|
х % |
t, с |
|
10 |
0,2 |
|
75 |
0,4 |
Д.2.7 В случае механических ТС, официально допущенных к буксированию прицепов категории O3 или O4, укомплектованных пневматическими тормозными системами, помимо требований, упомянутых выше, необходимо проверить соблюдение требований 5.2.1.18.4.1 следующим методом:
а) измерить давление на дальнем торце шланга длиной 2,5 м и внутренним диаметром 13 мм, который должен быть подсоединен к соединительной головке питающей магистрали, затем
б) сымитировать обрыв управляющей линии у соединительной головки, далее
в) в течение 0,2 с активизировать орган управления рабочего тормоза в соответствии с Д.2.3.
Д.3 Прицепы
Д.3.1 Значения времени реакции для прицепов должны быть измерены при полном отсоединении прицепов от механических ТС. Вместо механического ТС необходимо использовать имитатор (см. рисунки Д.1 - Д.3 дополнения 1 к приложению Д), к которому подсоединяют соединительные головки питающей магистрали, пневматической управляющей магистрали и/или электрической управляющей магистрали.
Д.3.2 Давление в питающей магистрали должно быть 6,5 бар.
Д.3.3 Имитатор пневматических управляющих магистралей (далее - имитатор) должен удовлетворять следующим требованиям:
Д.3.3.1 Имитатор должен иметь резервуар объемом 30 л, в котором перед каждым испытанием необходимо поддерживать давление 6,5 бар и который не должен заряжаться в процессе испытания. На выходе из устройства, управляющего торможением, имитатор должен иметь насадку, выбранную из насадок диаметрами от 4 до 4,3 мм включительно. Объем патрубка, измеренный от насадки до соединительной головки и включающий ее в себя, должен составлять (385 ± 5) см3 (что представляет собой эквивалент шланга длиной 2,5 м и диаметром 13 мм, находящегося под давлением 6,5 бар). Значения давления в управляющей магистрали, упомянутые в Д.3.3.3, должны быть измерены непосредственно за насадкой (по направлению потока).
Д.3.3.2 Устройство, управляющее тормозной системой, должно быть сконструировано так, чтобы тестер не оказывал влияния на функционирование этого устройства в эксплуатации.
Д.3.3.3 Имитатор должен быть соответствующим образом укомплектован, а именно необходимо подобрать такую насадку (см. Д.3.3.1), чтобы при подсоединении к ней резервуара объемом (385 ± 5) см3 время, необходимое для возрастания давления от 0,65 до 4,9 бар (от 10 % до 70 % номинального давления 6,5 бар соответственно), составило (0,2 ± 0,01) с. Если вышеупомянутый резервуар заменен резервуаром объемом (1155 ± 15) см3, время, необходимое для возрастания давления с 0,65 до 4,9 бар без дополнительной регулировки, должно составлять (0,38 ± 0,02) с. Нарастание давления в этом диапазоне должно быть приблизительно линейным. Указанные резервуары должны быть подсоединены к соединительной головке без использования гибких шлангов, и соединение должно иметь внутренний диаметр не менее 10 мм.
Д.3.3.4 Рисунки в дополнении 1 к настоящему приложению иллюстрируют примеры подбора установочных характеристик и использования имитатора.
Д.3.4 Имитатор для определения реакции на сигналы, передаваемые по электрической управляющей магистрали, должен удовлетворять следующим требованиям:
Д.3.4.1 Имитатор должен вырабатывать в электрической управляющей магистрали цифровой сигнал запроса в соответствии с [2] и выдавать соответствующую информацию на прицеп через контакты 6 и 7 соединителя [3], [4]. С целью измерить время реакции имитатор может по требованию изготовителя передавать на прицеп информацию об отсутствии пневматической управляющей магистрали и о том, что сигнал запроса электрической управляющей магистрали вырабатывается в двух независимых цепях (см. [2], пункты 6.4.2.2.24 и 6.4.2.2.25).
Д.3.4.2 Орган управления тормозной системы должен быть сконструирован так, чтобы тестер не оказывал влияния на его работу.
Д.3.4.3 Для измерения времени реакции сигнал, вырабатываемый электрическим имитатором, должен быть эквивалентным линейному возрастанию давления сжатого воздуха с 0,0 до 6,5 бар за (0,2 ± 0,01) с.
Д.3.5 Требования к рабочим характеристикам
Д.3.5.1 Для прицепов с пневматической управляющей магистралью отрезок времени от момента, когда давление, образуемое в управляющей магистрали имитатором, достигает 0,65 бар, до момента, когда давление в тормозной камере прицепа достигает 75 % своего асимптотического значения, не должно превышать 0,4 с.
Д.3.5.1.1 Прицепы, оборудованные пневматической управляющей магистралью и имеющие также электрический управляющий привод, должны быть испытаны подачей электроэнергии на прицеп через контакт 5 или 7 соединителя [3], [4].
Д.3.5.2 Для прицепов с электрической управляющей магистралью отрезок времени от момента, когда сигнал, вырабатываемый имитатором, превысит эквивалент 0,65 бар, до момента, когда давление в тормозной камере прицепа достигает 75 % своего асимптотического значения, не должно превышать 0,4 с.
Д.3.5.3 В случае прицепов, оборудованных как пневматической, так и электрической управляющими магистралями, измерение времени реакции на каждой управляющей магистрали проводят независимо, в соответствии с относящейся к данной магистрали процедурой, описанной выше.
Дополнение 1
к приложению Д
Примеры использования имитатора
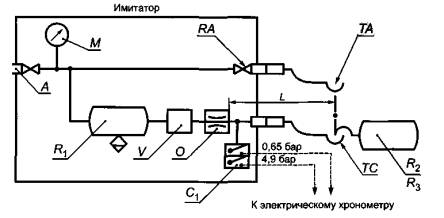
Рисунок Д.1 - Схема настройки имитатора
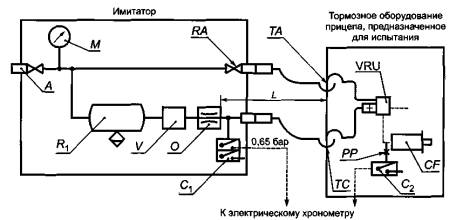
Рисунок Д.2 - Схема испытания прицепа
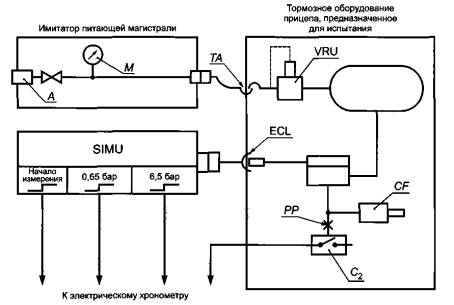
Рисунок Д.3 - Схема имитатора, предназначенного для испытания электрической управляющей магистрали
Условные обозначения к рисункам Д.1 - Д.3
А - соединение питающей магистрали с запорным клапаном (рисунки Д.1 - Д.3);
С1 - переключатель давления в имитаторе, отрегулированный на 0,65 и 4,9 бар (рисунки Д.1 и Д.2);
С2 - переключатель давления, предназначенный для подсоединения к тормозной камере прицепа и рассчитанный на включение при достижении 75 % асимптотического давления в тормозной камере CF (рисунки Д.2 и Д.3);
CF - тормозная камера (рисунки Д.2 и Д.3);
ECL - электрическая управляющая магистраль (см. [3] и [4]) (рисунок Д.3);
L - участок пневматической управляющей магистрали от насадки О и до (включительно) ее соединительной головки ТС, имеющий внутренний объем (385 ± 5) см3 при давлении 6,5 бар (рисунки Д.1 и Д.2);
М - манометр (рисунки Д.1 - Д.3);
О - насадка диаметром не менее 4 мм и не более 4,3 мм (рисунки Д.1 и Д.2);
РР - соединение для испытания давлением (рисунки Д.2 и Д.3);
R1 - воздушный резервуар объемом 30 л с дренажным клапаном (рисунки Д.1 и Д.2);
R2 - резервуар, включая его соединительную головку ТС, с калиброванным объемом (385 ± 5) см3 (рисунок Д.1);
R3 - резервуар, включая его соединительную головку ТС, с калиброванным объемом (1155 ± 15) см3 (рисунок Д.1);
RA - запорный клапан (рисунки Д.1 и Д.2);
SIMU - имитатор EBS 11 (см. [2]) (рисунок Д.3);
ТА - соединительная головка питающей магистрали (рисунки Д.1 - Д.3);
ТС - соединительная головка пневматической управляющей магистрали (рисунки Д.1 и Д.2);
V - устройство, управляющее тормозной системой (рисунки Д.1 и Д.2);
VRU - ускорительно-аварийный клапан (рисунки Д.2 и Д.3).
Приложение Е
(обязательное)
Требования к источникам энергии и устройствам для накопления энергии (аккумуляторам энергии)
Е.1 Тормозные системы, использующие сжатый воздух (пневматические тормозные системы)
Е.1.1 Устройства для накопления энергии (аккумуляторы энергии)
Е.1.1.1 Общие требования
Е.1.1.1.1 На ТС, функционирование тормозных систем которых требует использования сжатого воздуха, должны быть установлены устройства для накопления энергии (аккумуляторы энергии), удовлетворяющие требованиям Е.1.1.2 и Е.1.1.3.
Е.1.1.1.2 Необходимо обеспечить простую и наглядную идентификацию аккумуляторов энергии, принадлежащих различным контурам тормозной системы.
Е.1.1.1.3 Аккумуляторы энергии могут не соответствовать требованиям Е.1.1.2 и Е.1.1.3, если конструкция тормозной системы позволяет при отсутствии любого резервного источника энергии обеспечить тормозную эффективность не менее эффективности, предписанной для запасной тормозной системы.
Е.1.1.1.4 При проверке соответствия требованиям Е.1.1.2 и Е.1.1.3 тормоза должны быть отрегулированы так, чтобы зазоры между контактирующими поверхностями были минимальными.
Е.1.1.2 Механические ТС
Е.1.1.2.1 Аккумуляторы энергии механических ТС должны быть такими, чтобы после восьми полных воздействий на орган управления рабочей тормозной системы остаточное давление в аккумуляторе (аккумуляторах) энергии было не менее давления, необходимого для обеспечения предписанной эффективности запасного торможения.
Е.1.1.2.2 Проверка этого требования должна быть проведена следующим образом:
Е.1.1.2.2.1 Начальный уровень энергии в аккумуляторе (аккумуляторах) энергии должен быть установлен изготовителем. Этот уровень должен обеспечивать предписанную эффективность рабочей тормозной системы.
Е.1.1.2.2.2 Аккумулятор (аккумуляторы) энергии не следует пополнять в процессе испытания. Кроме того, все аккумуляторы энергии вспомогательных устройств должны быть изолированы.
Е.1.1.2.2.3 В случае механического ТС, официально допущенного к буксированию прицепа и имеющего пневматическую управляющую магистраль, питающая магистраль должна быть перекрыта, а непосредственно к соединительной головке пневматической управляющей магистрали должен быть подсоединен резервуар для сжатого воздуха объемом 0,5 л. Перед каждым использованием тормозов давление в этом резервуаре должно полностью отсутствовать. После испытания, описанного в Е.1.1.2.1, уровень энергии, направляемой в пневматическую управляющую магистраль, не должен опускаться ниже уровня, определяемого значением, эквивалентным половине значения при первом использовании тормозов.
Е.1.1.3 Прицепы
Е.1.1.3.1 Аккумуляторы энергии, установленные на прицепы, должны быть такими, чтобы после восьми полных воздействий на орган управления рабочей тормозной системы буксирующего ТС уровень энергии, направляемой к рабочим элементам, потребляющим энергию, не опускался ниже уровня, определяемого значением, эквивалентным половине значения, имеющего место при первом использовании тормозов, без активизации автоматической или стояночной тормозной системы прицепа.
Е.1.1.3.2 Испытание должно быть выполнено следующим образом:
Е.1.1.3.2.1 Давление в аккумуляторах энергии в начале каждого испытания должно составлять 8,5 бар.
Е.1.1.3.2.2 Питающая магистраль должна быть перекрыта. Кроме того, аккумулятор (аккумуляторы) энергии вспомогательного оборудования должен быть изолирован.
Е.1.1.3.2.3 Аккумуляторы энергии не следует пополнять в процессе испытания.
Е.1.1.3.2.4 При каждом применении тормозов давление в пневматической управляющей магистрали должно быть 7,5 бар.
Е.1.1.3.2.5 При каждом применении тормозов цифровое значение запроса в электрической управляющей магистрали должно соответствовать давлению 7,5 бар.
Е.1.2 Источники энергии
Е.1.2.1 Общие требования
Компрессоры должны соответствовать нижеследующим требованиям.
Е.1.2.2 Обозначения
Е.1.2.2.1 р1 -давление, соответствующее 65 % давления р2, определяемого в Е.1.2.2.2;
Е.1.2.2.2 р2 - давление, устанавливаемое изготовителем и соответствующее Е.1.1.2.2.1;
Е.1.2.2.3 t1 - время, необходимое для возрастания избыточного давления от 0 до р1;
t2 - время, необходимое для возрастания избыточного давления от 0 до р2.
Е.1.2.3 Условия проведения измерений
Е.1.2.3.1 Во всех случаях частоту вращения компрессора следует поддерживать на том уровне, который достигнут при частоте вращения двигателя, соответствующей его максимальной мощности, или при частоте вращения двигателя, задаваемой регулятором.
Е.1.2.3.2 При определении времени t1 и времени t2 в процессе испытаний аккумулятор (аккумуляторы) энергии вспомогательного оборудования должен быть изолирован.
Е.1.2.3.3 Если предполагается подсоединение прицепа к механическому ТС, то прицеп должен иметь аккумулятор энергии, максимальное избыточное давление в котором р, выраженное в барах, должно соответствовать давлению, которое может быть подано по питающему контуру буксирующего ТС, и объем которого V, выраженный в литрах, определяется формулой
pV = 20R,
где R - технически допустимая максимальная масса, приходящаяся на оси прицепа, выраженная в тоннах.
Е.1.2.4 Оценка результатов
Е.1.2.4.1 Время t1 измеренное для аккумулятора энергии, находящегося в наименее благоприятных условиях, не должно превышать:
Е.1.2.4.1.1 3 мин в случае ТС, не имеющих официального допуска для эксплуатации с прицепами, или
Е.1.2.4.1.2 6 мин в случае ТС, официально допущенных к эксплуатации с прицепами.
Е.1.2.4.2 Время t2, измеренное для аккумулятора энергии, находящегося в наименее благоприятных условиях, не должно превышать:
Е.1.2.4.2.1 6 мин в случае ТС, не имеющих официального допуска для эксплуатации с прицепами, или
Е.1.2.4.2.2 9 мин в случае ТС, официально допущенных к эксплуатации с прицепами.
Е.1.2.5 Дополнительное испытание
Е.1.2.5.1 Если механическое ТС оборудовано одним или несколькими аккумуляторами энергии, предназначенными для вспомогательного оборудования и имеющими суммарный объем, превышающий 20 % суммарного объема аккумуляторов энергии тормозной системы, необходимо провести дополнительное испытание, в процессе которого не должно быть никаких сбоев в работе клапанов, управляющих наполнением аккумулятора (аккумуляторов) энергии вспомогательного оборудования.
Е.1.2.5.2 В описанном ниже испытании должно быть подтверждено, что время t3, необходимое для повышения давления от нулевого до р2 в наименее благоприятно расположенном аккумуляторе энергии тормозной системы, составляет менее:
Е.1.2.5.2.1 8 мин в случае ТС, не имеющих официального допуска для эксплуатации с прицепами; или
Е.1.2.5.2.2 11 мин в случае ТС, официально допущенных к эксплуатации с прицепами.
Е.1.2.5.3 Испытание должно быть проведено при условиях, описанных Е.1.2.3.1 и Е.1.2.3.3.
Е.1.2.6 Буксирующие ТС
Е.1.2.6.1 Механические ТС, официально допущенные к буксированию прицепов, должны также соответствовать установленным выше требованиям для ТС, не имеющих такого допуска. В этом случае испытания, описанные в Е.1.2.4.1 и Е.1.2.4.2 (а также в Е.1.2.5.2), проводят без аккумуляторов энергии, упомянутых в Е.1.2.3.3.
Е.2 Вакуумные тормозные системы
Е.2.1 Аккумуляторы энергии
Е.2.1.1 Общие требования
Е.2.1.1.1 ТС, работа тормозных систем которых требует использования вакуума, должны быть оборудованы аккумуляторами энергии, соответствующими требованиям Е.2.1.2 и Е.2.1.3.
Е.2.1.1.2 Однако аккумуляторы энергии могут не соответствовать предписанным требованиям, если конструкция тормозной системы позволяет при отсутствии любого резервного источника энергии обеспечить тормозную эффективность не менее эффективности, предписанной для запасной тормозной системы.
Е.2.1.1.3 При проверке соответствия требованиям Е.2.1.2 и Е.2.1.3 тормоза должны быть отрегулированы так, чтобы зазоры между контактирующими поверхностями были минимальными.
Е.2.1.2 Механические ТС
Е.2.1.2.1 Аккумуляторы энергии механических ТС должны быть такими, чтобы оставалась возможность достичь предписанной эффективности запасного торможения:
Е.2.1.2.1.1 после четырех полных воздействий на орган управления рабочей тормозной системы в тех случаях, когда источником энергии является вакуумный насос;
Е.2.1.2.1.2 после восьми полных воздействий на орган управления рабочей тормозной системы в тех случаях, когда источником энергии является двигатель.
Е.2.1.2.2 Проверку этого требования проводят следующим образом:
Е.2.1.2.2.1 Начальный уровень энергии в аккумуляторе (аккумуляторах) энергии должен быть установлен изготовителем. Этот уровень должен обеспечивать предписанную эффективность торможения рабочей тормозной системы при вакууме, не превышающем 90 % максимального вакуума, создаваемого источником энергии.
Е.2.1.2.2.2 Аккумулятор (аккумуляторы) энергии не пополняют. Кроме того, все аккумуляторы энергии вспомогательных устройств должны быть изолированы.
Е.2.1.2.2.3 В случае механического ТС, официально допущенного к буксированию прицепа, питающая магистраль должна быть перекрыта, а к соединительной головке управляющей магистрали должен быть подсоединен аккумулятор энергии объемом 0,5 л. После испытания по Е.2.1.2.1 уровень вакуума, поддерживаемого в управляющей магистрали, не должен опускаться ниже уровня, определяемого значением, эквивалентным половине значения при первом использовании тормозов.
Е.2.1.3 Прицепы категорий O1 и O2
Е.2.1.3.1 Аккумуляторы энергии, установленные на прицепы, должны быть такими, чтобы уровень вакуума в исполнительных устройствах не опустился ниже уровня, эквивалентного половине значения при первом использовании тормозов после испытания, состоящего из четырех полных активизаций рабочей тормозной системы прицепа.
Е.2.1.3.2 Испытание должно быть выполнено следующим образом:
Е.2.1.3.2.1 Первоначальный уровень энергии в аккумуляторе (аккумуляторах) энергии должен соответствовать установленному изготовителем, обеспечивая при этом предписанную эффективность рабочей тормозной системы.
Е.2.1.3.2.2 Аккумуляторы энергии не пополняют в процессе испытания. Кроме того, аккумулятор (аккумуляторы) энергии вспомогательного оборудования должен быть изолирован.
Е.2.2 Источники энергии
Е.2.2.1 Общие требования
Е.2.2.1.1 Источник энергии должен в течение 3 мин обеспечить создание вакуума в аккумуляторе энергии, начиная от наружного атмосферного давления до уровня, предписанного в Е.2.1.2.2.1. В случае механического ТС, официально допущенного к эксплуатации с прицепом, время, необходимое для достижения этого уровня в условиях, описанных в Е.2.2.2, не должно превышать 6 мин.
Е.2.2.2 Условия проведения измерений
Е.2.2.2.1 Частота вращения источника вакуума должна быть равна:
Е.2.2.2.1.1 если источником вакуума является двигатель ТС, - частоте вращения двигателя, работающего на холостом ходу при неподвижном ТС и нейтральной передаче;
Е.2.2.2.1.2 если источником вакуума является вакуумный насос, - частоте вращения двигателя, равной 65 % частоты в режиме максимальной мощности, и
Е.2.2.2.1.3 если источником вакуума является вакуумный насос и двигатель имеет регулятор частоты вращения, - частоте вращения двигателя, равной 65 % максимальной частоты, обеспечиваемой регулятором.
Е.2.2.2.2 Если механическое ТС предназначено для эксплуатации совместно с прицепом, имеющим вакуумную рабочую тормозную систему, прицеп должен быть оборудован аккумулятором энергии, имеющим объем V, л, определяемый по формуле
V = 15R,
где R - технически допустимая масса, приходящаяся на оси прицепа, выраженная в тоннах.
Е.3 Гидравлические тормозные системы с аккумуляторами энергии
Е.3.1 Аккумуляторы энергии
Е.3.1.1 Общие требования
Е.3.1.1.1 ТС, работа тормозных систем которых требует использования аккумулированной энергии, передающейся жидкостью, находящейся под давлением, должны быть оборудованы аккумуляторами энергии, соответствующими требованиям Е.3.1.2.
Е.3.1.1.2 Аккумуляторы энергии могут не соответствовать требованиям Е.3.1.2, если конструкция тормозной системы позволяет при отсутствии любого резервного источника энергии обеспечить тормозную эффективность не менее эффективности, предписанной для запасной тормозной системы.
Е.3.1.1.3 При проверке соответствия требованиям Е.3.1.2.1, Е.3.1.2.2 и Е.3.2.1 тормоза должны быть отрегулированы так, чтобы зазоры между контактирующими поверхностями были минимальными, и для соответствия требованиям Е.3.1.2.1 частота полных активизаций тормозов должна обеспечивать интервал не менее 60 с между последовательными активизациями.
Е.3.1.2 Механические ТС
Е.3.1.2.1 Механические ТС, оборудованные гидравлическими тормозными системами с аккумуляторами энергии, должны соответствовать следующим требованиям:
Е.3.1.2.1.1 После восьми полных воздействий на орган управления рабочей тормозной системы при девятом воздействии должна быть обеспечена эффективность торможения, предписанная для запасной тормозной системы.
Е.3.1.2.1.2 Испытание проводят следующим образом:
Е.3.1.2.1.2.1 Испытание начинают при давлении, которое может устанавливать изготовитель, но оно не должно превышать давления включения.
Е.3.1.2.1.2.2 Аккумулятор(ы) энергии не следует пополнять в процессе испытания, кроме того, аккумуляторы энергии вспомогательных систем должны быть изолированы.
Е.3.1.2.2 Механические ТС, оборудованные гидравлической тормозной системой с аккумуляторами энергии, которые не могут соответствовать требованиям 5.2.1.5.1, считают удовлетворяющими этим требованиям при соблюдении следующих условий:
Е.3.1.2.2.1 При возникновении любого единичного отказа в тормозном приводе должна оставаться возможность после восьми полных воздействий на орган управления рабочей тормозной системы обеспечить при девятом воздействии эффективность торможения не ниже предписанной для запасной тормозной системы или, если обеспечение этой эффективности, требующей использования аккумулятора(ов) энергии, достигается воздействием на отдельный орган управления, должна оставаться возможность после восьми полных воздействий обеспечить при девятом воздействии остаточную эффективность торможения, предписанную в 5.2.1.4.
Е.3.1.2.2.2 Испытание проводят следующим образом:
Е.3.1.2.2.2.1 С помощью источника энергии, стационарного или работающего на частоте, соответствующей частоте вращения двигателя в режиме холостого хода, может быть воспроизведен любой отказ в тормозном приводе. Перед тем как воспроизвести такой отказ, аккумулятор энергии должен находиться под давлением, которое может быть задано изготовителем, но не должно превышать давление включения.
Е.3.1.2.2.2.2 Вспомогательное оборудование и его аккумуляторы энергии (при наличии) должны быть изолированы.
Е.3.2 Источники энергии, подводимой через рабочую жидкость
Е.3.2.1 Определения
р1 - максимальное рабочее давление в системе (давление включения);
р2 - давление после четырех полных воздействий на орган управления рабочей тормозной системы, начинающихся при давлении р1 и осуществляемых без пополнения аккумулятора (аккумуляторов) энергии;
t - время, необходимое для повышения давления в аккумуляторе энергии от р2 до р1 при отсутствии воздействий на орган управления рабочей тормозной системы.
Е.3.2.2 Условия проведения измерений
Е.3.2.2.1 В процессе определения времени t интенсивность выработки энергии источником энергии должна быть равна интенсивности при работе двигателя на частоте вращения, соответствующей максимальной мощности, или на частоте, ограничиваемой центробежным регулятором.
Е.3.2.2.2 В процессе определения времени t аккумулятор (аккумуляторы) энергии вспомогательного оборудования не должен быть изолирован, если только такая изоляция не происходит автоматически.
Е.3.2.3 Оценка результатов
Е.3.2.3.1 Для ТС всех категорий, за исключением М3, N2 и N3, время t не должно превышать 20 с.
Е.3.3 Характеристики предупреждающих устройств
При неработающем двигателе и давлении в начале испытания, которое может задавать изготовитель, но которое не должно превышать давления включения, предупреждающее устройство не должно включаться после двух полных воздействий на орган управления рабочей тормозной системы.
Приложение Ж
(обязательное)
Специальные требования к пружинным тормозным системам
Ж.1 Термины и определения
Ж.1.1 пружинная тормозная система: Тормозная система, в которой энергия, необходимая для торможения, выделяется одной или несколькими пружинами, действующими как аккумуляторы энергии. Энергия для сжатия пружины (пружин), необходимого для освобождения (прекращения действия) тормозов, подается и регулируется воздействием водителя на орган управления (определение термина «орган управления» - см. 2.4).
Ж.1.2 пружинная камера: Камера, в которой осуществляется сжатие и распрямление пружины (пружин).
Ж.1.3 давление: Если сжатие пружины (пружин) осуществляется с помощью вакуумного устройства, то в соответствии с настоящим приложением это подразумевает отрицательное давление.
Ж.2 Общие требования
Ж.2.1 Пружинная тормозная система не должна быть использована в качестве рабочей тормозной системы. Однако в случае возникновения неисправности в приводе рабочей тормозной системы допускается использовать пружинную тормозную систему для обеспечения остаточной эффективности торможения, предписанной в 5.2.1.4, при условии, что водитель имеет возможность плавно регулировать действие системы. В случае механических ТС, за исключением тягачей, предназначенных для буксирования полуприцепов, отвечающих требованиям, установленным в 5.2.1.4.1, пружинная тормозная система не должна быть единственным источником остаточного торможения. Вакуумная пружинная тормозная система не должна быть применена для прицепов.
Ж.2.2 Незначительные изменения любых предельных значений давления, которые могут происходить в контуре питания пружинной камеры, не должны вызывать существенного изменения тормозной силы.
Ж.2.3 Механические ТС, оборудованные пружинными тормозными системами, должны удовлетворять следующим требованиям:
Ж.2.3.1 Питающий контур пружинной камеры должен либо включать в себя собственный аккумулятор энергии, либо получать энергию по меньшей мере из двух независимых аккумуляторов энергии. Питающая магистраль прицепа может быть выполнена как ответвление от этого питающего контура при условии, что падение давления в питающей магистрали прицепа не вызовет активизации пружинной тормозной системы.
Ж.2.3.2 Вспомогательное оборудование может получать необходимую энергию из питающей магистрали приводов пружинных тормозов только при условии, что его работа, даже в случае неисправности источника энергии, не сможет вызвать падение энергии в аккумуляторе энергии для приводов пружинных тормозов ниже уровня, при котором еще возможно однократное освобождение пружинных тормозов.
Ж.2.3.3 Во всех случаях при заполнении тормозной системы, первоначально находящейся под нулевым давлением, пружинные тормоза должны оставаться полностью активизированными безотносительно к положению органа управления до того момента, как давление в рабочей тормозной системе станет достаточным для обеспечения, по меньшей мере, эффективности торможения, предписанной для запасной тормозной системы груженого ТС при воздействии на орган управления рабочей тормозной системы.
Ж.2.3.4 Пружинные тормоза, будучи активизированными, не должны освобождаться, пока давление в рабочей тормозной системе не повысится до уровня, при котором будет обеспечена, по крайней мере, остаточная эффективность торможения груженого ТС при воздействии на орган управления рабочей тормозной системы.
Ж.2.4 Конструкция тормозных систем механических ТС должна предусматривать возможность активизации и освобождения тормозов не менее трех раз при условии, что начальное давление в пружинной камере равно максимальному давлению, на которое рассчитана конструкция. В случае прицепов должно быть обеспечено освобождение тормозов не менее трех раз после отсоединения прицепа, при этом давление в питающей магистрали перед отсоединением должно быть не менее 7,5 бар. Перед проверкой выполнения этого требования должен быть освобожден аварийный/автоматический тормоз. Необходимо также отрегулировать тормоза так, чтобы зазор между контактирующими поверхностями был минимальным. Кроме того, на прицепе, соединенном с буксирующим ТС, должны быть обеспечены активизации и освобождение стояночной тормозной системы в соответствии с 5.2.2.10.
Ж.2.5 Давление в пружинной камере механического ТС не должно превышать 80 % минимального уровня давления, поддерживаемого в нормальных условиях, и в то же время не должно вызывать активизацию тормоза. Тормоз при этом должен быть отрегулирован на минимально возможный зазор между контактирующими поверхностями.
Давление в пружинной камере не должно превышать давления, которое может быть обеспечено после четырех полных активизаций рабочей тормозной системы в соответствии с Е.1.1.3 (приложение Е) и в то же время не должно вызывать активизацию тормоза. Начальное давление должно составлять 7,0 бар.
Ж.2.6 Как только давление в магистрали, питающей энергией пружинную камеру (за исключением магистралей вспомогательного устройства, освобождающего тормоза и использующего жидкость под давлением), падает до уровня, при котором элементы тормоза начинают перемещаться, должно включиться оптическое или акустическое предупреждающее устройство. При условии выполнения этого требования предупреждающее устройство может также включать в себя красный предупреждающий сигнал, характеристики которого установлены в 5.2.1.29.1.1. Это требование неприменимо к прицепам.
Ж.2.7 Если механическое ТС, официально допущенное к буксированию прицепов с неразделенной или полуразделенной тормозной системой, оборудовано пружинной тормозной системой, автоматическая активизация пружинной тормозной системы должна вызывать активизацию тормозов прицепа.
Ж.3 Вспомогательная система освобождения пружинных тормозов
Ж.3.1 Пружинная тормозная система должна быть сконструирована так, чтобы в случае возникновения неисправности в этой системе сохранялась возможность освобождения тормозов. Это может быть осуществлено с помощью использования вспомогательного освобождающего устройства (пневматического, механического и т.п.).
Вспомогательные освобождающие устройства, использующие для освобождения тормозов запасенную энергию, должны получать эту энергию из аккумулятора энергии, независимого от аккумулятора энергии, используемого пружинной тормозной системой в нормальных условиях. Энергоносители (сжатый воздух или жидкость) в таком вспомогательном освобождающем устройстве могут воздействовать на ту же поверхность плунжера в пружинной камере, что и энергоносители, применяемые в основной пружинной тормозной системе, при условии, что вспомогательное освобождающее устройство имеет отдельную питающую магистраль. Соединение этой магистрали с основной магистралью, связывающей управляющее устройство с пружинными камерами, должно находиться непосредственно около входа в каждую пружинную камеру или быть встроено непосредственно в корпус пружинной камеры. Это соединение должно содержать устройство, предотвращающее влияние одной магистрали на другую и соответствующее требованиям 5.2.1.6.
Ж.3.1.1 Для выполнения требований Ж.3.1 в элементах привода тормозной системы, перечисленных в 5.2.1.2.8, не должны возникать неисправности (отказы) при условии, что эти элементы изготовлены из металла или материала, имеющего схожие с ним характеристики, и не подвергаются значительным деформациям при торможении в нормальных условиях.
Ж.3.2 Если функционирование вспомогательного устройства по Ж.3.1 требует использования приспособления или гаечного ключа, соответствующее приспособление или ключ должно(ен) входить в комплект инструмента ТС.
Ж.3.3 Если вспомогательная освобождающая система использует запасенную энергию для освобождения пружинных тормозов, должны быть выполнены следующие требования:
Ж.3.3.1 если вспомогательная система освобождения пружинных тормозов и запасная/стояночная тормозная система имеют общий орган управления, то во всех случаях должны быть выполнены требования Ж.2.3;
Ж.3.3.2 если орган управления вспомогательной системы освобождения пружинных тормозов не объединен с органом управления запасной/стояночной тормозной системы, требования, установленные в Ж.2.3, должны быть выполнены обеими системами управления. Однако требования Ж.2.3.4 не должны распространяться на вспомогательную систему освобождения пружинных тормозов. Кроме того, орган управления вспомогательной системы освобождения пружинных тормозов должен быть расположен так, чтобы водитель, находящийся в нормальной рабочей позиции, не мог привести его в действие.
Ж.3.4 Если во вспомогательной системе освобождения пружинных тормозов используется сжатый воздух, система должна приводиться в действие отдельным органом управления, не связанным с основным органом управления пружинных тормозов.
Приложение И
(обязательное)
Требования к стояночным тормозным системам, оборудованным механическими устройствами блокировки тормозных цилиндров (блокираторами)
И.1 Термин и определение
механическое устройство блокировки тормозных цилиндров (mechanical brake-cylinder locking device): Устройство, обеспечивающее торможение транспортного средства стояночной тормозной системой путем механической блокировки штока тормозного плунжера. Механическая блокировка осуществляется выпуском сжатого воздуха, заключенного в блокировочной камере; при этом устройство сконструировано таким образом, что прекращение блокировки наступает благодаря восстановлению давления в блокировочной камере.
И.2 Специальные требования
И.2.1 Когда давление в блокировочной камере достигает уровня, при котором происходит механическая блокировка, должно включаться оптическое или звуковое предупреждающее устройство. Такое предупреждающее устройство может включать в себя красный предупреждающий сигнал, функции которого описаны в 5.2.1.29.1.1. Требование по установке такого устройства не применяют к прицепам.
Для прицепов давление, соответствующее механической блокировке, не должно превышать 4 бар. После возникновения любой единичной неисправности в рабочей тормозной системе прицепа должна быть обеспечена эффективность торможения, предписанная для стояночной тормозной системы. Кроме того, необходимо предусмотреть возможность не менее чем трехкратного освобождения тормозов после отсоединения прицепа, при этом давление в питающей магистрали перед отсоединением должно быть 6,5 бар. Регулировка тормозов должна быть выполнена так, чтобы зазоры между контактирующими поверхностями были минимальными. Должны также быть обеспечены активизация и освобождение стояночной тормозной системы в соответствии с 5.2.2.10, когда прицеп соединен с буксирующим ТС.
И.2.2 В тормозных цилиндрах, оборудованных механическим устройством блокировки, перемещение тормозного плунжера должно осуществляться с помощью энергии любого из двух независимых аккумуляторов энергии.
И.2.3 Блокированный тормозной цилиндр не должен освобождаться, если не обеспечена активизация тормоза после такого освобождения.
И.2.4 В случае возникновения неисправности в источнике энергии, подаваемой в блокировочную камеру, должна быть предусмотрена возможность применения вспомогательного освобождающего устройства (пневматического, которое может использовать воздух, содержащийся в одной из шин ТС, или механического).
И.2.5 Орган управления должен при воздействии на него выполнять последовательно нижеследующие функции:
- воздействие на тормоза, которое должно обеспечить предписанную эффективность стояночного торможения;
- блокировку тормозов в этом положении;
- снятие усилия, воздействующего на тормоза.
Приложение К
(обязательное)
Распределение тормозных сил по осям транспортного средства и требования к совместимости буксирующих транспортных средств и прицепов
К.1 Общие требования
К.1.1 ТС категорий М, N, O2, O3 и O4, не оборудованные АБС в соответствии с приложением Н, должны соответствовать всем требованиям настоящего приложения. В случае применения какого-либо специального устройства оно должно действовать автоматически 1).
__________
1) В случае прицепов с электрически контролируемым распределением тормозных сил требования настоящего приложения применимы, только если прицеп имеет электрическое соединение с тягачом через соединитель, соответствующий [3] или [4].
Однако ТС, не относящиеся к категории M1 оборудованные АБС в соответствии с приложением Н, должны также соответствовать требованиям К.7, если они дополнительно оборудованы специальным автоматическим устройством, управляющим распределением тормозных усилий по осям ТС. В случае возникновения неисправности в таком устройстве должна быть предусмотрена возможность остановки ТС в соответствии с К.6.
К.1.1.1 Если ТС укомплектовано тормозной системой длительного действия, замедляющая (тормозная) сила, производимая этой системой, не должна быть учтена при определении тормозной эффективности ТС в соответствии с требованиями настоящего приложения.
К.1.2 Требования, определяемые рисунками К.4 - К.7, распространяются как на механические ТС с пневматической управляющей магистралью, соответствующие 5.1.3.1.1, так и на механические ТС с электрической управляющей магистралью, соответствующие 5.1.3.1.3. В обоих случаях на осях абсцисс диаграмм, изображенных на этих рисунках, отложены цифры, соответствующие исходным значениям давления, передающегося по управляющей магистрали: для ТС, оборудованных в соответствии с 5.1.3.1.1, эти цифры отражают реальные значения давления сжатого воздуха в управляющей магистрали (рm). Для ТС, оборудованных в соответствии с 5.1.3.1.3, цифры на оси абсцисс определяют числовые значения запрашиваемых данных, передаваемые по электрической управляющей магистрали в соответствии с [1] и [2]. ТС, оборудованные в соответствии с 5.1.3.1.2 (т.е. имеющие как пневматические, так и электрические управляющие магистрали), должны удовлетворять требованиям диаграмм, относящихся к обеим управляющим магистралям. Однако взаимной идентичности кривых, описывающих тормозные характеристики, относящиеся к обеим управляющим магистралям, не требуется.
К.1.3 Наблюдение за изменением тормозных сил
К.1.3.1 В процессе проведения испытательной лабораторией испытаний должно быть подтверждено, что рост тормозных сил на оси каждой независимой группы осей 2) происходит в следующих диапазонах давления:
________
2) В случае многоосных ТС, у которых расстояния между любыми смежными осями превышают 2 м, каждую отдельную ось считают независимой группой осей.
а) для груженых ТС:
- по меньшей мере на одной оси рост тормозной силы должен начинаться, когда давление в соединительной головке находится в диапазоне от 0,2 до 1,0 бар;
- по меньшей мере на одной из осей каждой другой группы осей рост тормозной силы должен начинаться, когда давление в соединительной головке не превышает 1,2 бар;
б) для порожних ТС:
- по меньшей мере на одной оси рост тормозной силы должен начинаться, когда давление в соединительной головке находится в диапазоне от 0,2 до 1,0 бар.
К.1.3.1.1 Колесо (колеса) оси (осей) отрывают от опорной поверхности, при этом оно (они) свободно вращается, затем начинают увеличивать тормозную силу и измеряют давление в соединительной головке, соответствующее моменту, когда колесо (колеса) перестанет прокручиваться от руки. Эти условия считают соответствующими началу роста тормозной силы.
К.1.4 Для ТС категории О с пневматическими тормозными системами, если применяют альтернативную процедуру подтверждения результатов испытаний, описанную в приложении X, соответствующие расчеты, требуемые этим приложением, выполняют с использованием характеристик эффективности торможения, полученных на основе соответствующих протоколов испытаний, приведенных в приложении Ф, и данных о высоте центра масс, полученных методом, описанным в дополнении 1 к приложению X.
i - порядковый номер оси (i = 1 - передняя ось, i = 2 - следующая ось и т.д.);
Рi - вертикальная реакция со стороны дорожной поверхности на i-ю ось;
Ni - вертикальная реакция со стороны дорожной поверхности на i-ю ось в процессе торможения;
Ti - тормозная сила на i-й оси (сила воздействия колес i-й оси на дорожную поверхность в результате активизации тормозов в нормальных условиях);
fi - коэффициент использования сил сцепления, реализуемый на i-й оси1) (fi = Ti/Ni);
J - замедление ТС;
g - ускорение силы тяжести (g = 10 м/с2);
z - удельная тормозная сила ТС (z = J/g)2);
Р - масса ТС;
h - высота центра масс относительно дорожной поверхности, установленная изготовителем и подтвержденная испытательной лабораторией, проводящей соответствующие испытания;
E - колесная база;
k - теоретический коэффициент сцепления шины с дорожной поверхностью;
Кс - коэффициент коррекции для груженого полуприцепа;
Кv - коэффициент коррекции для порожнего полуприцепа;
TM - сумма тормозных сил на периферии всех колес ТС, предназначенного для буксирования прицепов;
Рм - суммарная вертикальная статическая реакция со стороны дорожной поверхности на колеса ТС, предназначенного для буксирования прицепов 3);
рm - давление в управляющей магистрали на соединительной головке;
TR - сумма тормозных сил на периферии всех колес прицепа;
PR - суммарная вертикальная статическая реакция со стороны дорожной поверхности на колеса прицепа 3);
PRmax - PR при максимальной массе 4) прицепа;
ER - расстояние между шкворнем и осью (или поперечной плоскостью симметрии тележки) полуприцепа;
hR - высота центра масс полуприцепа относительно дорожной поверхности, установленная изготовителем и подтвержденная испытательной лабораторией, проводящей соответствующие испытания.
______________
1) Графики использования сил сцепления ТС - кривые, показывающие для конкретных условий нагружения использование сил сцепления на каждой i-й оси в зависимости от удельной тормозной силы ТС.
2) Для полуприцепов z - тормозная сила, деленная на статическую нагрузку на ось(и) полуприцепа.
3) См. В.1.4.4.3 (приложение В).
4) См. 2.17.
К.3 Требования к механическим транспортным средствам
К.3.1 Двухосные транспортные средства
К.3.1.1 Для всех категорий ТС при 0,2 ≤ k ≤ 0,8 5):
________
5) Требования К.3.1.1 и К.5.1.1 не заменяют требования приложения В, относящиеся к тормозной эффективности. Однако если в испытаниях, проведенных при условиях, указанных в К.3.1.1 и К.5.1.1, обеспечена более высокая тормозная эффективность, чем предписываемая в приложении В, то должны быть выполнены требования, относящиеся к кривым использования сил сцепления в зонах графиков на рисунках К.1 - К.3, определяемых прямыми линиями k = 0,8 и z = 0,8.
z ≥ 0,10 + 0,85 (k - 0,20).
К.3.1.2 При всех вариантах загрузки ТС кривая использования сил сцепления для задней оси не должна быть размещена выше аналогичной кривой для передней оси:
К.3.1.2.1 для всех значений удельной тормозной силы в диапазоне от 0,15 до 0,80 в случае ТС категории М1 (см. рисунок К.1) 6), а также ТС категории N1 с отношением нагрузок на заднюю ось в груженом/порожнем состоянии, не превышающим 1,5, или максимальной массой менее 2 т;
_______
6) Однако для ТС указанной категории в диапазоне 0,30 ≤ z ≤ 0,45 допускается обратное взаимное расположение этих кривых при условии, что кривая использования силы трения для задней оси не превышает более чем на 0,05 линию, определяемую равенством k = z (линию идеального использования силы трения) на рисунке К.1.
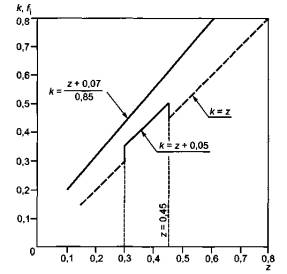
Рисунок К.1 - График использования сил сцепления для транспортных средств категории М1 и некоторых транспортных средств категории N1 (см. К.3.1.2.2)
К.3.1.2.2 для всех значений удельной тормозной силы в диапазоне от 0,15 до 0,50 в случае ТС категории N1 1), за исключением ТС категории N1 упомянутых в К.3.2.1 (см. рисунок К.2);
__________
1) Это условие считают выполненным также в случае, когда для удельных тормозных сил в диапазоне от 0,15 до 0,30 кривые использования сил сцепления на всех осях расположены между двумя линиями, параллельными линии идеального использования силы сцепления и определяемыми равенствами k = z + 0,08 и k = z - 0,08, как показано на рисунке К.2, где кривая использования силы сцепления на задней оси может пересекать (как возможный вариант) линию k = z - 0,08 и соответствует в диапазоне удельных тормозных сил от 0,30 до 0,50 условию z ≥ 0,5k - 0,8, а в диапазоне от 0,5 до 0,61 - условию z ≥ 0,5k + 0,21.
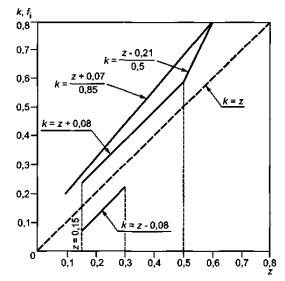
Рисунок К.2 - График использования сил сцепления для транспортных средств категории N1, за исключением транспортных средств этой категории, упомянутых в К.3.1.2.2
Примечание - Нижнюю границу k = z - 0,08 не применяют к оценке реализации сил сцепления на задней оси.
К.3.1.2.3 для всех значений удельной тормозной силы в диапазоне от 0,15 до 0,30 в случае ТС других категорий (см. рисунок К.3) 1).
__________
1) Это условие считают выполненным также в случае, когда для удельных тормозных сил в диапазоне от 0,15 до 0,30 кривые использования сил сцепления на всех осях расположены между двумя линиями, параллельными линии идеального использования силы сцепления и определяемыми равенствами k = z + 0,08 и k = z - 0,08 на рисунке К.3, и кривая использования силы сцепления на задней оси для удельных тормозных сил z ≥ 0,3 соответствует условию: z ≥ 0,3 + 0,74 (k - 0,38).
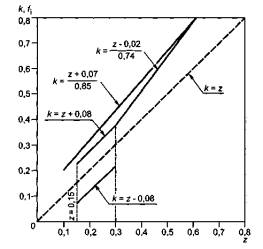
Рисунок К.3 - График использования сил сцепления для транспортных средств категорий иных, чем M1 N1 и полные прицепы
Примечание - Нижнюю границу k = z - 0,08 не применяют для оценки реализации сил сцепления на задней оси.
К.3.1.3 В случае механического ТС, официально допущенного к буксированию прицепов категории O3 или O4, оборудованных пневматической тормозной системой, должны быть выполнены следующие требования:
К.3.1.3.1 Если испытание проводят с неработающим источником энергии, заглушённой питающей магистралью, резервуаром вместимостью 0,5 л, присоединенным к пневматической управляющей магистрали, и наличием в системе давлений включения и выключения, давление на соединительных головках питающей и пневматической магистралей при полном воздействии на орган управления должно быть между 6,5 и 8,5 бар независимо от загрузки ТС.
К.3.1.3.2 Для ТС, оборудованных электрической управляющей магистралью, полное воздействие на орган управления рабочей тормозной системы должно вызвать сигнал запроса [1], [2], цифровой код которого соответствует давлению от 6,5 до 8,5 бар.
К.3.1.3.3 Такие значения должны быть наглядно продемонстрированы на механическом ТС, отсоединенном от прицепа. Области совместимости на диаграммах, приведенных на рисунках К.4 - К.6, не должны выходить за 7,5 бар и/или соответствующее значение эквивалентного дискретного сигнала [1] и [2].
К.3.1.3.4 В соединительной головке питающей магистрали при давлении включения в системе должно быть обеспечено давление не менее 7 бар. Это давление должно быть продемонстрировано без активизации рабочих тормозов.
К.3.1.4 Проверка выполнения требований К.3.1.1 и К.3.1.2
К.3.1.4.1 Для проверки выполнения требований К.3.1.1 и К.3.1.2 изготовитель должен представить кривые использования сил сцепления на передней f1 и задней f2 осях, рассчитанные по формулам:
Примечание - Расшифровка обозначений дана в К.2.
Кривые должны быть построены для ТС в следующих двух вариантах загрузки:
К.3.1.4.1.1 порожнего ТС в снаряженном состоянии (включая водителя) 2);
_________
2) В случае ТС, представляющего собой шасси с кабиной, допускается дополнительная нагрузка, имитирующая массу кузова, но такая, чтобы масса ТС не превосходила минимальную массу ТС, декларируемую изготовителем в приложении Б.
К.3.1.4.1.2 груженого ТС, для которого предусмотрена возможность изменения распределения нагрузки на оси, включая создание максимально допустимой нагрузки на переднюю ось.
К.3.1.4.2 Если для ТС с постоянным приводом на все колеса невозможно выполнить в соответствии с К.3.1.4.1 расчетное подтверждение соответствия требованиям К.3.1.1 и К.3.1.2, изготовитель может вместо этого провести испытание по определению последовательности блокировки колес. При этом для всех удельных тормозных сил в диапазоне от 0,15 до 0,8 блокировка передних колес должна происходить одновременно с блокировкой задних колес или ранее.
К.3.1.4.3 Процедура подтверждения соответствия требованиям К.3.1.4.2
К.3.1.4.3.1 Испытания по определению последовательности блокировки колес должны быть проведены на дорожных покрытиях двух видов: с коэффициентом сцепления не более 0,3 и с коэффициентом сцепления около 0,8 (сухая дорога) со скоростями начала торможения, установленными в К.3.1.4.3.2.
К.3.1.4.3.2 Скорости начала торможения:
60 км/ч, но более 0,8vmax - на дорожной поверхности с низким коэффициентом сцепления;
80 км/ч, но не более vmax - на дорожной поверхности с высоким коэффициентом сцепления.
К.3.1.4.3.3 Усилие, приложенное к педали тормоза, может превышать допустимые усилия активизации тормозов, указанные в В.2.1.1 (приложение В).
К.3.1.4.3.4 Это усилие прилагают и увеличивают таким образом, чтобы второе колесо оси блокировалось в диапазоне времени от 0,5 до 1,0 с, отсчитанного с момента приложения усилия, тем самым обеспечивая блокирование всех колес данной оси ТС (допускается также блокирование и других колес ТС в процессе испытания, например, в случае одновременного блокирования обеих осей).
К.3.1.4.4 Испытание, описанное в К.3.1.4.2, должно быть выполнено на дорожном покрытии каждого вида дважды. Если результаты одного испытания не считают удовлетворительными, должно быть проведено третье, решающее, испытание.
К.3.1.4.5 Для ТС, снабженных электрической рекуперативной тормозной системой категории В, если на функциональные возможности этой системы влияет степень зарядки аккумуляторов, необходимо построить кривые, учитывающие компонент торможения электрической рекуперативной тормозной системой в условиях приложения минимальной и максимальной тормозных сил. Это требование неприменимо, если ТС оборудовано АБС, управляющей колесами, подсоединенными к электрической рекуперативной тормозной системе, и в этом случае должно быть заменено требованиями приложения Н.
К.3.1.5 Буксирующие транспортные средства, за исключением тягачей для полуприцепов
К.3.1.5.1 В случае механических ТС, которым официально разрешено буксирование прицепов категории O3 или O4, укомплектованных пневматической тормозной системой, области совместимости значений удельной тормозной силы ТМ/РМ и давления рm должны соответствовать областям, показанным на рисунке К.4, для всех значений рm между 0,2 и 7,5 бар.
Примечание - Зависимости, определяемые по графику, должны быть применены последовательно для промежуточных состояний загрузки ТС в диапазоне от груженого до порожнего состояния и осуществлены с помощью автоматических устройств.
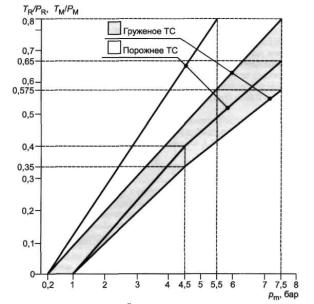
Рисунок К.4 - Области совместимости значений удельных тормозных сил и давления в соединительной головке управляющей магистрали для буксирующих транспортных средств и прицепов, за исключением тягачей для полуприцепов (седельных тягачей) и полуприцепов
К.3.1.6 Тягачи для полуприцепов
К.3.1.6.1 Тягачи в комбинации с порожними полуприцепами
Порожняя комбинация ТС состоит из тягача в снаряженном состоянии (включая водителя), сочлененного с порожним полуприцепом. Динамическая нагрузка на тягач со стороны полуприцепа должна быть представлена массой Ps, смонтированной на седле тягача и равной 15 % максимальной массы, приходящейся на сцепное устройство. Необходимо иметь возможность регулировать тормозные силы в диапазоне от состояния «тягач с порожним полуприцепом» до состояния «одиночный тягач», при этом значения тормозных сил, относящихся к «одиночному тягачу», подлежат проверке.
К.3.1.6.2 Тягачи в комбинации с гружеными полуприцепами
Груженая комбинация ТС состоит из тягача в снаряженном состоянии (включая водителя), сочлененного с груженым полуприцепом. Динамическая нагрузка на тягач со стороны полуприцепа должна быть представлена массой Ps, смонтированной на седле тягача и определяемой по формуле
Ps = Pso (1 + 0,45z),
где Pso - разность между максимально допустимой массой комбинации тягача с полуприцепом и массой комбинации тягача с полуприцепом в снаряженном состоянии.
Значение высоты центра масс h рассчитывают по формуле
![]()
где h0 - высота центра масс тягача;
hs - высота контактной поверхности сцепного устройства, на которую опирается полуприцеп;
Р0 - порожняя масса одиночного тягача.
![]()
К.3.1.6.3 Для ТС, оборудованного пневматической тормозной системой, допустимая область взаимосвязанных значений удельной тормозной силы ТМ/РМ и давления рm должна находиться в пределах, ограниченных значениями давления рm от 0,2 до 7,5 бар (см. рисунок К.5).
Примечание - Зависимости, определяемые по графику, должны быть применены последовательно для промежуточных состояний загрузки ТС в диапазоне от груженого до порожнего состояния и осуществлены с помощью автоматических устройств.
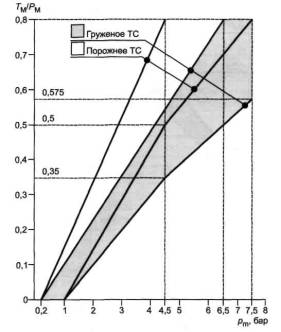
Рисунок К.5 - Области совместимости значений удельных тормозных сил и давления в соединительной головке управляющей магистрали для тягачей, предназначенных для буксирования полуприцепов
К.3.2 Транспортные средства, имеющие более двух осей
ТС, имеющие более двух осей, должны удовлетворять требованиям К.3.1. При этом требования, относящиеся к последовательности блокирования колес, считают выполненными, если в диапазоне удельных тормозных сил от 0,15 до 0,30 использование сил сцепления по меньшей мере на одной из передних осей будет выше, чем по меньшей мере на одной из задних осей.
К.4 Требования к полуприцепам
К.4.1 Полуприцепы, оборудованные пневматическими тормозными системами
К.4.1.1 Допустимые с точки зрения совместимости значения удельной тормозной силы TR/PR и давления рm должны лежать в двух областях, построенных на основе рисунков К.6 и К.7 для всех значений давления рm в диапазоне от 0,2 до 7,5 бар как для порожнего, так и для груженого состояния полуприцепа. Эти требования должны быть удовлетворены при всех допустимых условиях нагрузки на оси полуприцепа.
Примечание - Соотношение между удельной тормозной силой TR/PR и давлением в управляющей магистрали для груженого и порожнего прицепов (см. рисунок К.6) устанавливают следующим образом:
- коэффициенты Kс (для груженого ТС) и Kv (для порожнего ТС) определяют по диаграмме, показанной на рисунке К.7. Чтобы определить области совместимости, соответствующие груженому и порожнему ТС, значения ординат верхней и нижней границ заштрихованной области на рисунке К.6 должны быть умножены на коэффициенты Кс и Kv соответственно.

Рисунок К.6 - Области совместимости значений удельных тормозных сил и давления в соединительной головке управляющей магистрали полуприцепов
К.4.1.2 Если требования К.4.1.1 не могут быть выполнены совместно с требованиями В.3.1.2.1 (приложение В), относящимися к полуприцепам при Kс < 0,8, то полуприцеп должен иметь эффективность торможения не меньшую, чем обусловленная в В.3.1.2.1, и быть оборудован АБС, соответствующей требованиям приложения Н, за исключением требований к совместимости, установленных в разделе 1 приложения Н.
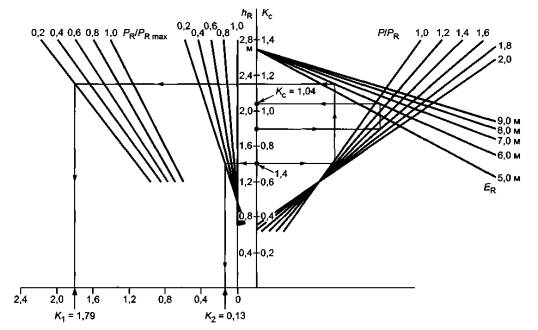
Рисунок К.7 - Диаграмма для определения коэффициентов коррекции, соответствующих груженому и порожнему прицепам
К.4.2 Пояснение к диаграмме на рисунке К.7
К.4.2.1 Формула, на основе которой построена диаграмма на рисунке К.7:

K.4.2.2 Практический пример определения коэффициентов Кс и Кv
К.4.2.2.1 Линии со стрелками на рисунке К.7 демонстрируют построение коэффициентов Kс и Kv для ТС, имеющего следующие характеристики:
|
Характеристика |
Груженое ТС |
Порожнее ТС |
|
Р(gР) |
24 т (240 кH) |
4,2 т (42 кН) |
|
Pr |
150 кН |
30 кН |
|
рRmax |
150 кН |
150 кН |
|
hr |
1,8 м |
1,4 м |
|
Er |
6,0 м |
6,0 м |
|
|
1,6 |
1,4 |
|
|
- |
0,2 |
К.4.2.2.2 Определение корректирующего коэффициента Кс для груженого ТС
Начальная точка построения - на оси ординат hR = 1,8 м.
Затем проводят горизонтальную линию до пересечения с соответствующей прямой gp/PR (для данного случая gp/PR = 1,6).
От точки пересечения проводят вертикальную линию до соответствующей прямой ER (для данного случая ER = 6 м).
От точки пересечения проводят горизонтальную линию до оси ординат и по шкале для Кс определяют значение коэффициента коррекции для груженого ТС (для данного случая Кс = 1,04).
К.4.2.2.3 Определение корректирующего коэффициента Кv для порожнего ТС
К.4.2.2.3.1 Определение коэффициента К2
Начальная точка построения - на оси ординат hR = 1,4 м.
Затем проводят горизонтальную линию влево до пересечения с соответствующей прямой PR/PRmax из группы, расположенной вблизи оси ординат (для данного случая PR/PRmax = 0,2).
От точки пересечения проводят вертикальную линию вниз до пересечения с осью абсцисс, по шкале которой считывают значение коэффициента К2 (для данного случая К2 = 0,13).
К.4.2.2.3.2 Определение коэффициента К1
Начальная точка построения - на оси ординат hR = 1,4 м.
Затем проводят горизонтальную линию вправо до пересечения с соответствующей прямой gP/PR (для данного случая gP/PR = 1,4).
От точки пересечения проводят вертикальную линию до соответствующей прямой ER (для данного случая ER = 6 м).
От точки пересечения проводят влево горизонтальную линию до пересечения с соответствующей прямой PR/PRmax из группы, расположенной вдали от оси ординат (для данного случая PR/PRmax = 0,2).
Затем от точки пересечения проводят вертикальную линию вниз до пересечения с осью абсцисс, по шкале которой считывают значение коэффициента K1 (для данного случая K1 = 1,79).
К.4.2.2.3.3 Расчет корректирующего коэффициента Kv для порожнего ТС
Kv = K1 - K2 (для данного случая Kv = 1,66).
К.5 Требования к полным прицепам и прицепам с центральной осью
К.5.1 Требования к полным прицепам, оборудованным пневматическими тормозами
К.5.1.1 Полные прицепы с двумя осями должны удовлетворять следующим требованиям:
К 5.1.1.1 для значений k, находящихся в диапазоне от 0,2 до 0,8 1):
___________
1) Выполнение условий К.3.1.1 и К.5.1.1 оставляют неизменными требования приложения В, относящиеся к эффективности торможения. Однако если в испытаниях, проведенных при условиях, описанных в К.3.1.1 и К.5.1.1, обеспечена эффективность торможения более высокая, чем предписываемая в приложении В, условия, относящиеся к кривым использования сцепления, должны быть применены в областях графиков, показанных на рисунках К.1 - К.3, определяемых прямыми линиями k = 0,8 и z = 0,8.
z ≥ 0,1 + 0,85 (k - 0,2);
К.5.1.1.2 при всех вариантах загрузки ТС кривая использования сил сцепления на задней оси не должна быть размещена выше аналогичной кривой для передней оси для всех удельных тормозных сил в диапазоне от 0,15 до 0,30. Это условие считают выполненным также в случае, когда для удельных тормозных сил в диапазоне от 0,15 до 0,30 кривые использования сил сцепления на всех осях расположены между двумя линиями, параллельными линии идеального использования силы сцепления и определяемыми равенствами k = z + 0,08 и k = z - 0,08, как показано на рисунке К.3, и кривая использования силы сцепления на задней оси для удельных тормозных сил z ≥ 0,3 удовлетворяет условию
z ≥ 0,3 + 0,74 (k - 0,38);
К.5.1.1.3 для подтверждения требований К.5.1.1.1 и К.5.1.1.2 используют ту же процедуру, что и для К.3.1.4.
К.5.1.2 Полные прицепы, имеющие более двух осей, должны удовлетворять требованиям К.5.1.1. Требования К.5.1.1, касающиеся последовательности блокирования колес, считают выполненными, если для удельных тормозных сил в диапазоне от 0,15 до 0,30 сила сцепления, реализуемая хотя бы на одной оси группы передних осей, превышает силу сцепления, реализуемую хотя бы на одной оси группы задних осей.
К.5.1.3 Допустимые комбинации значений удельной тормозной силы TR/PR и давления рm должны лежать в пределах областей, показанных на рисунке К.4 при всех давлениях в диапазоне от 0,2 до 7,5 бар как на порожнем, так и на груженом ТС.
К.5.2 Требования к прицепам с центральной осью, оборудованным пневматическими тормозами
К.5.2.1 Допустимые комбинации значений удельной тормозной силы TR/PR и давления рm должны лежать в пределах двух областей, показанных на рисунке К.4, после умножения значений на оси ординат на 0,95. Это требование должно быть выполнено при всех давлениях в диапазоне от 0,2 до 7,5 бар как на порожнем, так и на груженом ТС.
К.5.2.2 Если требования К.3.1.2.1 не могут быть выполнены из-за слишком низкого коэффициента сцепления, то прицеп с центральной осью должен быть оборудован АБС, соответствующей требованиям приложения Н.
К.6 Требования, которые должны быть выполнены в случае отказа системы распределения тормозных сил
Если требования настоящего приложения выполняют с помощью специального устройства (например, устройства, механически управляющего распределением тормозных сил по осям в результате воздействия подвески ТС), то должна быть предусмотрена возможность остановки механического ТС с эффективностью запасного торможения в случае неисправности такого устройства. Для механических ТС, которым официально разрешено буксировать прицепы с пневматическими тормозами, должна быть предусмотрена возможность достижения давления в соединительной головке управляющей магистрали в пределах диапазона, установленного в К.3.1.3. В случае неисправности такого устройства, установленного на прицепе, должна быть обеспечена эффективность торможения не менее 30 % эффективности рабочего торможения этого ТС.
К.7.1 ТС всех категорий, за исключением M1 которые соответствуют требованиям настоящего приложения, благодаря использованию устройств, механически управляемых подвеской ТС, должны иметь маркировку, показывающую рабочее перемещение устройства между позициями, соответствующими порожнему и груженому состояниям ТС, а также дающую дополнительную информацию для регулировки устройства.
К.7.1.1 Если устройство, реагирующее на тормозную нагрузку, управляется через подвеску ТС какими-либо иными способами, на ТС должна быть нанесена маркировка, дающая информацию для регулировки этого устройства.
К.7.2 Если выполнение требований данного приложения осуществляют с помощью устройства, изменяющего давление воздуха в тормозном приводе, на ТС должна быть нанесена маркировка, указывающая осевые нагрузки в контакте с опорной поверхностью, номинальные значения давления на выходе из устройства, а также давление на входе, составляющее не менее 80 % максимального давления на входе, заявленного изготовителем ТС, для следующих вариантов загрузки:
К.7.2.1 технически допустимой максимальной осевой нагрузки для оси (осей), осуществляющей управление устройством;
К.7.2.2 осевой нагрузки (осевых нагрузок), соответствующей порожнему ТС в снаряженном состоянии (см. приложение Б, «Приложение к протоколу испытаний ...», пункт 10);
К.7.2.3 осевой нагрузки (осевых нагрузок), приближенной к осевой нагрузке (осевым нагрузкам) ТС в снаряженном состоянии с предполагаемым к установке кузовом, где осевые нагрузки, упомянутые в К.7.2.2, относятся к шасси ТС с кабиной;
К.7.2.4 осевой нагрузки (осевых нагрузок), назначенной изготовителем для обеспечения регулировки устройства и его последующей проверки в эксплуатации, если эта нагрузка отличается от нагрузок, установленных вК.7.2.1 - К.7.2.2.
К.7.3 Сведения, приводимые в «Приложении к протоколу испытаний ...», пункт 11.8 (см. приложение Б), должны включать в себя информацию, позволяющую проверить соответствие ТС требованиям К.7.1 и К.7.2.
К.7.4 Маркировка, описанная в К.7.1 и К.7.2, нанесенная на ТС, должна быть хорошо различимой и нестираемой. Пример такой маркировки показан на рисунке К.8.
|
Данные для регулировки |
Загрузка транспортного средства |
Ось № 2. Нагрузка на дорогу, даН |
Давление на входе, бар |
Номинальное давление на выходе, бар |
|
|
Груженое |
10000 |
6,0 |
6,0 |
|
Порожнее |
1500 |
6,0 |
2,4 |
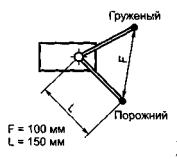
Рисунок К.8 - Пример маркировки устройства, реагирующего на тормозную нагрузку на ось транспортного средства (место установки - ось № 2)
К.7.5 Системы распределения тормозных сил с электронным управлением, которые могут не соответствовать требованиям К.7.1 - К.7.4, должны иметь процедуру самопроверки функций, влияющих на распределение тормозных сил. Кроме того, когда ТС неподвижно, необходимо обеспечить выполнение процедур проверки, описанных в К.1.3.1, путем создания номинального давления, соответствующего началу торможения как для груженого, так и для порожнего ТС.
К.8 Испытание ТС
В процессе испытаний испытательная лаборатория должна проверить соответствие требованиям, содержащимся в данном приложении, а также выполнить любые другие испытания, которые сочтет необходимыми для достижения этой цели. Результаты любых дополнительных испытаний должны быть зафиксированы и добавлены в отчет об испытаниях, выполненных испытательной лабораторией.
Приложение Л
(обязательное)
Условия, при которых испытания «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III» не должны быть проведены
Л.1 ТС, представленное на испытания по определению соответствия требованиям настоящего стандарта, не нуждается в проведении испытаний «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III» в следующих случаях:
Л.1.1 Когда представленное ТС (подразумевается механическое ТС или прицеп) в том, что касается шин, энергии торможения, реализуемой на каждой оси, метода крепления шин и тормозных узлов, идентично в отношении торможения механическому ТС или прицепу, которое:
Л.1.1.1 выдержало испытание «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III»;
Л.1.1.2 выдержало испытание на соответствие настоящему стандарту по реализации энергии торможения для масс, приходящихся на каждую ось, не меньших, чем у представленного ТС.
Л.1.2 Когда представленное ТС (подразумевается механическое ТС или прицеп) в том, что касается шин, энергии торможения, реализуемой на каждой оси, метода крепления шин и тормозных узлов, идентично оси или осям, которые по отдельности выдержали испытание «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III» для значений масс, распределенных по осям, не меньших, чем у представленного ТС, при условии, что энергия торможения, реализуемая на каждой оси, не превосходит энергию торможения, реализованную на каждой оси в исходном испытании или испытаниях, проведенных на отдельно взятой оси.
Л.1.3 Когда представленное ТС оборудовано тормозной системой длительного действия, иной чем система торможения двигателем и идентичной тормозной системе длительного действия, испытанной ранее, при условии, что в этом испытании было подтверждено выполнение следующих требований:
Л.1.3.1 тормозная система длительного действия в испытании, выполненном на уклоне не менее 6 % (испытании «Тип-II») или на уклоне не менее 7 % (испытании «Тип-IIА») без участия других тормозных систем, стабилизировала скорость ТС, максимальная масса которого в процессе испытания была не менее чем максимальная масса представленного ТС;
Л.1.3.2 в испытании, которое было проведено в соответствии с Л.1.3.1, было подтверждено, что частота вращения вращающихся частей тормозной системы при достижении представленным ТС скорости движения 30 км/ч такова, что тормозной момент (момент сопротивления) системы не менее чем момент, соответствующий испытанию, описанному в Л.1.3.1.
Л.1.4 Когда представленное ТС - это прицеп, оборудованный пневматическими барабанными тормозами с разжимными S-образными кулачками или пневматическими дисковыми тормозами 1), удовлетворяющий требованиям дополнения 2 к настоящему приложению, относящимся к характеристикам, сопоставимым с характеристиками, приводимыми в отчете об исходных испытаниях соответствующей оси, как показано в дополнении 3 к настоящему приложению.
__________
1) Другие конструкции тормозов также могут быть рассмотрены при условии предоставления соответствующей информации.
Л.2 Понятие «идентичный» в Л.1.1 - Л.1.3 означает идентичность в отношении геометрических и механических характеристик компонентов ТС, упоминаемых в этих пунктах, и материалов, использованных при их изготовлении.
Л.3 Если к ТС применяют изложенные выше требования, то к «Приложению к протоколу испытаний транспортного средства в отношении торможения на соответствие ГОСТ Р 41.13-2007» (см. приложение Б) должны быть добавлены следующие сведения:
Л.3.1 в случае, описанном в Л.1.1, - выходные данные протокола испытаний исходного ТС, подвергнутого испытанию «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III»;
Л.3.2 в случае, описанном в Л.1.2, - заполненная таблица Л.1 из дополнения 1 к настоящему приложению;
Л.3.3 в случае, описанном в Л.1.3, - заполненная таблица Л.2 из дополнения 1 к настоящему приложению;
Л.3.4 в случае, описанном в Л.1.4, - заполненная таблица Л.3 из дополнения 1 к настоящему приложению.
Дополнение 1
к приложению Л
Формы таблиц для обоснования отсутствия необходимости проведения испытаний «Тип-I» и/или «Тип-II» (или «Тип-IIА»), или «Тип-III»
Таблица Л.1
|
Порядковый номер оси |
Характеристики оси представленного транспортного средства |
Характеристики исходной оси1) |
||||
|
Максимальная масса2), приходящаяся на ось, кг |
Проектная тормозная сила для колес оси, Н |
Скорость ТС, км/ч |
Максимальная масса2), приходящаяся на ось, кг |
Тормозная сила, развиваемая на колесах оси, Н |
Скорость ТС, км/ч |
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
1) Исходная ось - ось, подвергнутая испытаниям по определению исходных тормозных сил (см. 2.31). 2) См. 2.17. |
||||||
Таблица Л.2
|
Наименование показателя |
Значение показателя |
|
Полная масса представленного ТС, кг |
|
|
Проектная тормозная сила для колес оси, Н |
|
|
Проектный тормозной момент на главном валу тормозной системы длительного действия, Н·м |
|
|
Тормозной момент, развиваемый на главном валу тормозной системы длительного действия (согласно диаграмме), Н·м |
|
Таблица Л.3
|
Исходная ось . . . . . . . . . . . . . . |
Отчет № . . . . . . . . . . . . . |
Дата . . . . . . . . . . . . . . (копия прилагается) |
|
|
Ось транспортного средства |
Вид испытания: |
||
|
«Тип-I» |
«Тип-III» |
||
|
Энергия торможения, реализуемая на оси 1), Н |
|||
|
Ось 1 |
T1 = . . . . .%Ре |
T1 = . . . . .%Ре |
|
|
Ось 2 |
T2 = . . . . .%Ре |
T2 = . . . . .%Ре |
|
|
Ось 3 |
T3 = . . . . .%Ре |
T3 = . . . . .%Ре |
|
|
Ось... |
T . . . = . . . . .%Ре |
T . . . = . . . . .%Ре |
|
|
Расчетный ход штока тормозной камеры 2), мм |
|||
|
Ось 1 |
s1 = . . . . . . . . . . . . |
s1 = . . . . . . . . . . . . |
|
|
Ось 2 |
s2 = . . . . . . . . . . . . |
s2 = . . . . . . . . . . . . |
|
|
Ось 3 |
s3 = . . . . . . . . . . . . |
s3 = . . . . . . . . . . . . |
|
|
Ось... |
s... = . . . . . . . . . . . . |
s... = . . . . . . . . . . . . |
|
|
Среднее толкающее усилие, передающееся на шток тормозной камеры 3), Н |
|||
|
Ось 1 |
ThA1 = . . . . . . . . . . . |
ThA1 = . . . . . . . . . . . |
|
|
Ось 2 |
ThA2 = . . . . . . . . . . . |
ThA2 = . . . . . . . . . . . |
|
|
Ось 3 |
ThA3 = . . . . . . . . . . . |
ThA3 = . . . . . . . . . . . |
|
|
Ось... |
ThA… = . . . . . . . . . . . |
ThA… = . . . . . . . . . . . |
|
|
Тормозная сила на осях ТС 4), Н |
|||
|
Ось 1 |
T1 = . . . . . . . . . . . . |
T1 = . . . . . . . . . . . . |
|
|
Ось 2 |
T2 = . . . . . . . . . . . . |
T2 = . . . . . . . . . . . . |
|
|
Ось 3 |
T3 = . . . . . . . . . . . . |
T3 = . . . . . . . . . . . . |
|
|
Ось... |
T… = . . . . . . . . . . . . |
T… = . . . . . . . . . . . . |
|
|
Характеристики торможения |
«Тип-0» Результаты испытаний проверяемого прицепа (Б) |
«Тип-I» «Горячие» тормоза (результаты расчета) |
«Тип-III» «Горячие» тормоза (результаты расчета) |
|
Эффективность торможения ТС5) |
. . . . . . . . . |
. . . . . . . . . |
. . . . . . . . . |
|
Требования к торможению при «горячих» тормозах6) |
|
≥ 0,36 и ≥ 0,60 E |
≥ 0,40 и ≥ 0,60 E |
|
1) См. 4.3.1 дополнения 2 к приложению Л. 2) См. 4.3.1.1 дополнения 2 к приложению Л. 3) См. 4.3.1.2 дополнения 2 к приложению Л. 4) См. 4.3.1.4 дополнения 2 к приложению Л. 5) См. 4.3.3 дополнения 2 к приложению Л. 6) См. В.1.5.3, В.1.6.3 и В.1.7.2 (приложение В). |
|||
Дополнение 2
к приложению Л
Альтернативные методы испытаний «Тип-I» и «Тип-III» для тормозов прицепов
1 Общие положения
1.1 В соответствии с Л.1.4 проведение испытаний «Тип-I» и «Тип-III» может быть признано нецелесообразным в числе испытаний ТС для подтверждения соответствия настоящему стандарту при условии, что компоненты тормозной системы соответствуют требованиям настоящего дополнения и что полученные расчетным путем показатели эффективности торможения отвечают требованиям настоящего стандарта для ТС соответствующей категории.
1.2 Испытания, выполненные по методам, описанным в настоящем дополнении, должны быть учтены при определении соответствия требованиям, приведенным выше.
1.3 Испытания, выполненные в соответствии с 3.6 настоящего дополнения, и результаты, приведенные в разделах 2 дополнений 3 и 4 приложения Л, должны быть приняты в качестве средств подтверждения соответствия требованиям 5.2.2.8.1.
1.4 Регулировка тормоза (тормозов) перед испытанием «Тип-III», описанным ниже, должна быть выполнена в соответствии со следующими процедурами (в зависимости от конструкции тормоза):
1.4.1 Регулировка пневматических тормозов прицепа должна обеспечить функционирование системы автоматической регулировки тормозов. Для этого ход штока s0 тормозной камеры должен быть отрегулирован так, чтобы было выполнено условие
s0 ≥ 1,1sre-adjust,
где s0 ≥ 1,1sre-adjust - ход штока при изменении регулировки в соответствии с указаниями изготовителя устройства автоматической регулировки тормоза, а именно ход штока в начале воздействия устройства на регулировку рабочего зазора тормоза при давлении в тормозной камере, равном 1,0 бар.
При этом максимальное значение s0 не должно превышать значения, рекомендованного изготовителем.
Если по согласованию с испытательной лабораторией измерение хода штока тормозной камеры признано нецелесообразным, с испытательной лабораторией должна быть согласована иная первоначальная регулировка.
При описанных выше условиях тормоз должен быть приведен в действие последовательно 50 раз при давлении, равном 2 бар. За этим должна последовать единичная активизация тормоза при давлении в тормозной камере не менее 6,5 бар.
1.4.2 Регулировка гидравлических дисковых тормозов прицепа не является обязательной.
1.4.3 Методика регулировки гидравлических барабанных тормозов прицепа должна быть определена изготовителем.
1.5 Регулировка тормозов прицепов, оборудованных устройствами автоматической регулировки тормозов, перед испытанием «Тип-I», описанным ниже, должна быть проведена в соответствии с процедурой, установленной в 1.4 настоящего дополнения.
(см. рисунок Л.1)
Р - вертикальная статическая реакция со стороны дорожной поверхности;
С - тормозной момент на входе в тормоз;
Сmax - максимально допустимый тормозной момент на входе в тормоз;
С0 - пороговый тормозной момент на входе в тормоз (минимальный момент на входе в тормоз, требуемый для получения минимального момента на выходе из тормоза, который может быть измерен);
R - динамический радиус качения колеса;
Т - тормозная сила в контакте шины с дорогой;
М - тормозной момент (М = Т·R);
z - удельная тормозная сила (z = T/P = M/PR);
s - ход штока тормозной камеры (рабочий ход плюс холостой ход штока);
sA - ход штока тормозной камеры в составе тормоза, оборудованного устройством автоматической регулировки;
smax - см- дополнение 7 к приложению Ф;
sp - см. дополнение 7 к приложению Ф;
Тh - толкающее усилие на штоке тормозной камеры;
ТhА - см. дополнение 7 к приложению Ф;
l - плечо рычага (на который воздействует шток тормозной камеры);
r - радиус тормозных барабанов;
р - давление при активизации тормозов.
Примечание - Условные обозначения, относящиеся к характеристикам эталонного тормоза, должны иметь нижний индекс «е».
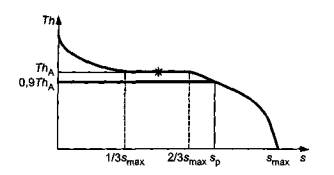
Рисунок Л.1 - Зависимость толкающего усилия на штоке тормозной камеры от хода штока
3 Методы испытаний
3.1 Дорожные испытания
3.1.1 Испытания тормозной эффективности предпочтительно проводить только на одиночной оси.
3.1.2 Результаты испытаний комбинации осей могут быть использованы в соответствии с 1.1 настоящего дополнения при условии, что все оси этой комбинации вносят равные доли в энергию торможения, идущую на подтормаживание прокатываемых осей и на торможение осей при «горячих» тормозах.
3.1.2.1 Это условие обеспечено, если на всех осях идентичны следующие элементы:
- геометрические параметры тормозов;
- применяемые тормозные накладки;
- способ монтажа колес;
- установленные шины;
- способ активизации тормозов;
- распределение давления в тормозных камерах.
3.1.2.2 Результаты испытаний для комбинации осей документируют в виде средних значений параметров по всем осям, входящим в комбинацию, как если бы была испытана «усредненная» одиночная ось.
3.1.3 Предпочтительно, чтобы на ось (оси) действовала максимальная статическая осевая нагрузка. Однако это не является обязательным при условии, что в процессе испытаний дается соответствующий допуск на различия в сопротивлении качению, вызываемые изменением нагрузки на испытуемую ось (оси).
3.1.4 Необходимо учесть допуск на влияние увеличения сопротивления качению в результате использования для проведения испытаний комбинации ТС.
3.1.5 Начальная скорость в испытании должна быть установлена заранее. Конечную скорость v2, км/ч, рассчитывают по формуле
где v1 - начальная скорость, км/ч;
Р0 - масса буксирующего ТС в процессе испытания, кг;
Р1 - часть массы прицепа, приходящаяся на незаторможенную ось, кг;
Р2 - часть массы прицепа, приходящаяся на заторможенную ось, кг.
3.2 Испытания на инерционном динамометрическом стенде
3.2.1 Испытательный стенд должен иметь вращающийся барабан, инерционные характеристики которого воспроизводят воздействие массы ТС при замедлении, необходимое для испытания эффективности тормоза одного колеса в «холодном» и «горячем» состояниях. Барабан должен вращаться с постоянной частотой, чтобы на стенде возможно было провести испытание, описанное в 3.5.2 и 3.5.3 настоящего дополнения.
3.2.2 Испытание должно быть проведено на полностью собранном колесе (включая шину), смонтированном на вращающейся части тормоза так, как это было бы выполнено на ТС. Инерционная масса может быть связана с тормозом непосредственно или через шины и колеса.
3.2.3 В процессе предварительного разогрева при испытании «горячих» тормозов возможно охлаждение тормоза потоком воздуха, имеющим направление и скорость vair, имитирующие реальные условия охлаждения. При этом
vair = 0,33v,
где v - скорость начала торможения в испытании.
Температура охлаждающего воздуха должна быть равна наружной температуре.
3.2.4 Если сопротивление качению шины не компенсируется автоматически в процессе испытаний, момент, приложенный к тормозу, должен быть скорректирован путем вычитания момента, эквивалентного коэффициенту сопротивления качения, равному 0,01.
3.3 Динамические испытания на барабанном стенде
3.3.1 Ось колеса предпочтительно должна быть нагружена статической нагрузкой, соответствующей максимальной массе, приходящейся на эту ось. Однако это условие не является существенным, если в процессе испытания устанавливают соответствующий допуск на изменение значений сопротивления качения, вызываемое отклонениями массы, приходящейся на испытуемую ось.
3.3.2 В процессе разогрева при испытании «горячих» тормозов возможно охлаждение тормоза потоком воздуха, имеющим направление и скорость (vair), имитирующие реальные условия охлаждения. При этом
vair = 0,33 v,
где v - скорость начала торможения в испытании.
Температура охлаждающего воздуха должна быть равна наружной температуре.
3.3.3 Торможение продолжается 1 с после окончания периода роста тормозной эффективности, длящегося не более 0,6 с.
3.4 Условия проведения испытаний
3.4.1 Для проведения испытания тормоза (тормозов) необходимо наличие аппаратуры, обеспечивающей:
3.4.1.1 непрерывную запись параметров, позволяющих определять тормозной момент на колесе или тормозную силу на периферии шины;
3.4.1.2 непрерывную запись давления воздуха в тормозной камере;
3.4.1.3 определение скорости ТС в процессе испытания;
3.4.1.4 измерение начальной температуры на наружной поверхности тормозного барабана или тормозного диска;
3.4.1.5 измерение хода штока тормозной камеры в испытаниях «Тип-0», «Тип-I» или «Тип-III».
3.5.1 Дополнительное испытание «холодных» тормозов
3.5.1.1 Испытание проводят при частоте вращения, эквивалентной начальной скорости 40 км/ч для испытания «Тип-I» и 60 км/ч - для испытания «Тип-III», чтобы затем оценить эффективность торможения при «горячих» тормозах в конце испытаний «Тип-I» и «Тип-III».
3.5.1.2 Проводят три активизации тормозов при одних и тех же давлении р и частоте вращения, эквивалентной начальной скорости 40 км/ч для испытания «Тип-I» и 60 км/ч - для испытания «Тип-III», при приблизительно одинаковой начальной температуре тормозов, измеряемой на наружной поверхности барабанов или дисков и не превышающей 100 °С. Активизация тормозов должна быть осуществлена при давлении в тормозной камере, обеспечивающем тормозной момент или тормозную силу, эквивалентный(ую) удельной тормозной силе z ≥ 50 %. Давление в тормозной камере не должно превышать 6,5 бар, а тормозной момент на входе С не должен превышать максимально допустимый тормозной момент на входе Сmax. Среднее значение по трем измерениям принимают как показатель эффективности «холодных» тормозов.
3.5.2 Испытание уменьшения эффективности тормозов (испытание «Тип-1»)
3.5.2.1 Испытание проводят при частоте вращения, эквивалентной начальной скорости, равной 40 км/ч, при начальной температуре тормозов, измеряемой на наружной поверхности барабанов или дисков и не превышающей 100 °С.
3.5.2.2 Удельную тормозную силу поддерживают на уровне 7 %, включая сопротивление качению (см. 3.2.4 настоящего дополнения).
3.5.2.3 Испытание проводят в течение 2 мин 33 с или на отрезке пути 1,7 км при скорости ТС 40 км/ч. Если эта скорость недостижима, то допускается увеличение продолжительности испытания в соответствии с В.1.5.2.2 (приложение В).
3.5.2.4 Не позднее чем через 60 с после окончания испытания «Тип-I» выполняют испытание эффективности «горячих» тормозов в соответствии с В.1.5.3 (приложение В) при частоте вращения, эквивалентной начальной скорости 40 км/ч. Давление в тормозной камере должно быть таким же, как и в испытании «Тип-0».
3.5.3 Испытание уменьшения эффективности тормозов (испытание «Тип-III»)
3.5.3.1 Методы испытания на многократное торможение
3.5.3.1.1 Дорожные испытания - см. В.1.7 (приложение В).
3.5.3.1.2 Испытания на инерционном динамометрическом стенде
Для проведения стендовых испытаний, аналогичных описанным в 3.2 настоящего дополнения, условия могут быть такими же, как и для дорожных испытаний (см. В.1.7.1), при
![]()
3.5.3.1.3 Испытание на барабанном динамометрическом стенде
Для проведения стендовых испытаний, аналогичных описанным в 3.3 настоящего дополнения, должны быть выполнены следующие условия:
число активизаций тормоза . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20;
продолжительность цикла торможения, состоящего из времени торможения 25 с и времени свободного качения на «освобожденном» тормозе 35 с . . . . . . . . . . . . . . . . . . . . . 60 с;
скорость в процессе испытания . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 км/ч;
удельная тормозная сила . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0,06;
коэффициент сопротивления качению . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 0,01.
3.5.3.2 Испытания по определению эффективности «горячих» тормозов проводят в соответствии с В.1.7.2 (приложение В) не позднее чем через 60 с после окончания испытания «Тип-III». Давление в тормозной камере должно быть таким же, как и в процессе испытания «Тип-0».
3.6 Требования к устройству автоматической регулировки тормозов
3.6.1 Устройство автоматической регулировки тормозов, установленное на тормоз, работоспособность которого проверяют согласно настоящему дополнению, должно соответствовать требованиям, приведенным ниже.
По завершении испытаний, описанных в 3.5.2.4 или 3.5.3.2 настоящего дополнения (испытания «Тип-I» или «Тип-III» соответственно), должно быть проверено выполнение требований, изложенных в 3.6.3 настоящего дополнения.
3.6.2 Альтернативное устройство автоматической регулировки тормозов, установленное на тормоз, для которого уже подготовлен отчет об испытаниях по форме, приведенной в дополнении 3 к приложению Л, должно удовлетворять следующим требованиям:
3.6.2.1 Тормозная эффективность
После прогрева тормозов, выполненного в соответствии с процедурами, описанными в 3.5.2 или 3.5.3 настоящего дополнения (испытание «Тип-I» или «Тип-III» соответственно), должно быть проверено выполнение одного из следующих требований:
а) эффективность рабочей тормозной системы при «горячих» тормозах должна составлять не менее 80 % эффективности, предписанной для испытания «Тип-0», или
б) тормоз должен быть активизирован при давлении в тормозной камере, эквивалентном давлению, используемому в испытании «Тип-0». При этом давлении измеряют суммарный ход штока тормозной камеры sA. Должно быть выполнено требование
sA ≤ 0,9sp,
где sp - эффективный ход штока - ход, при котором толкающее усилие составляет 90 % среднего значения толкающего усилия ThA - см. раздел 2 настоящего дополнения.
Это требование проверяют в следующих условиях:
Тормоз должен быть активизирован при давлении в тормозной камере, используемом в испытании «Тип-0»; при этом давлении измеряют суммарный ход штока sA.
3.6.2.2 После завершения испытаний, описанных в 3.6.2.1 настоящего дополнения, необходимо проверить выполнение требований 3.6.3 настоящего дополнения.
3.6.3 Испытания на свободное качение
После завершения испытаний, описанных в 3.6.1 или 3.6.2 настоящего дополнения, тормоз (тормоза) охлаждают до температуры, определяющей «холодные» тормоза (т.е. не превышающей 100 °С), при этом свободное качение прицепа/колеса (колес) должно быть подтверждено выполнением одного из следующих требований:
а) колеса должны вращаться свободно (т.е. их можно свободно проворачивать вручную), или
б) при постоянной частоте вращения, эквивалентной путевой скорости v = 60 км/ч, и отпущенном тормозе (тормозах) температура тормозного барабана/диска не должна превышать 80 °С. В этом случае наличие остаточного тормозного момента считают допустимым.
3.7 Отчет об испытаниях
3.7.1 Отчет об испытаниях, выполненных в соответствии с 3.5 и 3.6.1 настоящего дополнения, должен быть оформлен по образцу, приведенному в дополнении 3 к приложению Л.
3.7.2 Тормоз и ось должны быть идентифицированы. Особенности тормозов оси, подвергнутой испытаниям, допустимая масса, приходящаяся на ось, и номер протокола испытаний, оформленного в соответствии с дополнением 3 к приложению Л, должны быть нанесены на ось в виде маркировки.
3.7.3 Если установлен тормоз с альтернативным устройством регулировки, результаты испытаний, выполненных в соответствии с 3.6.2 настоящего дополнения, должны быть представлены в протоколе, подготовленном по образцу, приведенному в дополнении 4 к приложению Л.
4 Методы проверки
4.1 Проверка компонентов
Технические параметры тормозов, которыми укомплектовано ТС, представленное на испытания по подтверждению соответствия настоящему стандарту, должны быть проверены по каждому из следующих критериев:
|
|
|
Технический параметр |
Критерий оценки |
|
4.1.1 |
а) |
Сечение барабана в плоскости, перпендикулярной к оси вращения |
Изменения не допускаются |
|
|
б) |
Материал тормозного барабана или тормозного диска |
То же |
|
|
с) |
Масса тормозного барабана или тормозного диска |
Допускается увеличение не более чем на 20 % по сравнению с массой эталонного образца |
|
4.1.2 |
а) |
Расстояние между колесом и наружной поверхностью тормозного диска или цилиндрической поверхностью тормозного барабана (размер Е, см. рисунок Л.2 или Л.3) |
Допуски определяет испытательная лаборатория (компетентный орган), проводящая испытания |
|
|
б) |
Часть тормозного барабана или тормозного диска, не закрываемая колесом (размер F, см. рисунок Л.2 или Л.3) |
То же |
|
4.1.3 |
а) |
Материал тормозных накладок и колодок |
Изменения не допускаются |
|
|
б) |
Ширина тормозных накладок и колодок |
То же |
|
|
в) |
Толщина тормозных накладок и колодок |
» |
|
|
г) |
Площадь активной рабочей поверхности тормозных накладок и колодок |
» |
|
|
д) |
Метод фиксации тормозных накладок и колодок |
» |
|
4.1.4 |
|
Геометрия тормоза (см. рисунок Л.4 или Л.5) |
Изменения не допускаются |
|
4.1.5 |
|
Радиус качения колеса R |
Допускается изменение в соответствии с 4.3.1.4 настоящего дополнения |
|
4.1.6 |
а) |
Среднее толкающее усилие на штоке ТhА |
Допускается изменение при условии, что расчетная эффективность тормоза удовлетворяет требованиям 4.3 настоящего приложения |
|
|
б) |
Ход штока тормозной камеры s |
То же |
|
|
в) |
Плечо рычага l (см. рисунок Л.4 или Л.5) |
» |
|
|
г) |
Давление в тормозной камере р |
» |
|
4.1.7 |
|
Статическая масса Р |
Статическая масса Р не должна превышать массу Ре (см. раздел 2 настоящего дополнения) |
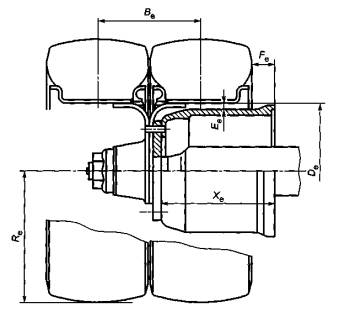
|
Ширина тормозного барабана Хе, мм |
Вертикальная реакция Rе, H |
Шина |
Обод |
Ве, мм |
Rе, мм |
Dе, мм |
Eе, мм |
Fе, мм |
|
|
|
|
|
|
|
|
|
|
Рисунок Л.2 - Сборочный узел «шины-ступица-барабанный тормоз» в разрезе
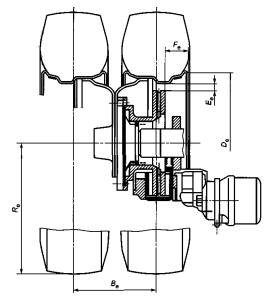
|
Ве, мм |
Rе, мм |
Dе, мм |
Eе, мм |
Fе, мм |
|
|
|
|
|
|
Рисунок Л.3 - Сборочный узел «шины-ступица-дисковый тормоз» в разрезе
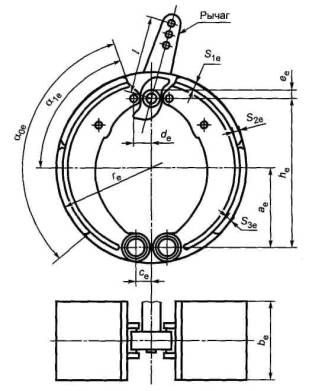
|
Тип тормоза |
ae, мм |
he, мм |
ce, мм |
de, мм |
ee, мм |
α0e, …° |
α1e, …° |
de, мм |
re, мм |
Fe, мм |
S1e, мм |
S2e, мм |
S3e, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l - плечо рычага (одно из ряда возможных), мм;
Fe - рабочая площадь торможения, приходящаяся на один тормоз, см2.
Рисунок Л.4 - Барабанный тормоз. Разрез в плоскости, перпендикулярной к оси вращения ступицы
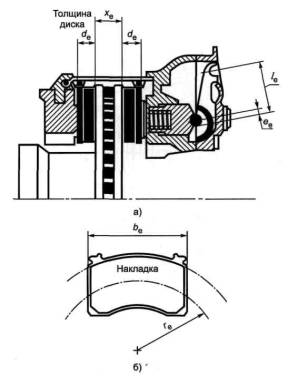
|
le, мм |
ee, мм |
de, мм |
xe, мм |
re, мм |
be, мм |
Fe, cм2 |
|
. . . . . . . |
|
|
|
|
|
|
l - плечо рычага (одно из ряда возможных), мм;
Fe - рабочая площадь торможения (суммарная площадь накладок), приходящаяся на один тормоз, см2.
Рисунок Л.5 - Дисковый тормоз:
а) разрез в плоскости, перпендикулярной к оси вращения ступицы;
б) накладка тормоза
4.2 Проверка энергии торможения, реализуемой тормозом
4.2.1 Тормозные силы T для каждого проверяемого тормоза (при одинаковом давлении в управляющей магистрали рm), необходимые для создания силы сопротивления движению, предписанной для испытаний «Тип-I» и «Тип-III», не должны превышать значений Тe, установленных в 2.1 и 2.2 дополнения 3 к приложению Л, которые принимают в качестве исходных по результатам испытаний эталонного тормоза.
4.3 Проверка эффективности «горячих» тормозов
4.3.1 Тормозную силу T для каждого проверяемого тормоза при заданных значениях давления в тормозной камере р и в управляющей магистрали рm, при которых проводят испытание «Тип-0» проверяемого прицепа, рассчитывают следующим образом:
4.3.1.1 Расчетный ход штока s проверяемого тормоза определяют по формуле
![]()
Полученное значение s не должно превосходить sp. В данном случае ход штока sp был определен ранее и заявлен в соответствии с процедурой, описанной в разделе 2 приложения Ф. Это значение sp допускается применять только для диапазона значений давления, указанного в 3.3.1 отчета испытаний, приведенного в дополнении 1 к приложению Ф.
4.3.1.2 Измеряют среднее значение толкающего усилия ThA на штоке тормозной камеры, установленной на проверяемом тормозе, при давлении в соответствии с 4.3.1.
4.3.1.3 Момент на входе в тормоз С затем рассчитывают по формуле
C = ThA l.
Значение С не должно превышать значение Сmах.
4.3.1.4 Расчетную тормозную силу Т для проверяемого тормоза определяют по формуле
![]()
При этом должно быть выполнено условие:
R ≥ 0,8 Re.
4.3.2 Расчетную тормозную эффективность проверяемого прицепа определяют по формуле
![]()
4.3.3 Эффективность торможения при «горячих» тормозах, которая может быть достигнута после испытания «Тип-I» или «Тип-III», должна быть определена расчетным путем в соответствии с 4.3.1.1 -4.3.1.4 настоящего дополнения. Результаты этих расчетов, полученные по формуле, приведенной в 4.3.2, должны удовлетворять требованиям настоящего стандарта, предъявляемым к проверяемому прицепу. Числовое значение параметра «эффективность торможения», регистрируемого в испытании «Тип-0» в соответствии с В.1.5.3 или В.1.7.2 (приложение В), должно быть таким же, что и значение этого параметра, регистрируемое в испытании «Тип-0» проверяемого прицепа.
Дополнение 3
к приложению Л
Форма отчета об испытаниях
(в соответствии с 3.7.1 и 3.7.2 дополнения 2 к приложению Л)
|
ОТЧЕТ ОБ ИСПЫТАНИИ № ___________ |
|
|
1 |
Техническое описание объекта испытания |
|
1.1 |
Ось: |
|
|
Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Партия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Технически допустимая максимальная нагрузка Ре . . . . . . . . . . . . . . . . . . . . . . . . . . . . даН |
|
1.2 |
Тормоз: |
|
|
Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Марка . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Технически допустимый момент на входе в тормоз Сmах . . . . . . . . . . . . . . . . . . . . . . . . .Нм |
|
|
Устройство автоматической регулировки тормозов: |
|
|
интегрированное/неинтегрированное1) |
|
|
Тормозной барабан/тормозной диск1) |
|
|
Внутренний диаметр барабана/наружный диаметр диска1) |
|
|
Эффективный радиус |
|
|
Толщина2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Масса . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Материал . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тормозная накладка |
|
|
Изготовитель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Маркировка (должна быть различима на накладке, смонтированной на тормозной колодке) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Ширина . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Толщина . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Площадь рабочей поверхности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Способ фиксации . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Геометрия тормоза - приложить чертеж с размерами, показанный: |
|
|
- для барабанных тормозов - на рисунке Л.4; |
|
|
- для дисковых тормозов - на рисунке Л.5 |
|
1.3 |
Колесо (колеса): |
|
|
одиночное/сдвоенные1) |
|
|
Диаметр обода D - приложить чертеж, показанный на рисунке Л.2 или Л.3 (в зависимости от конструкции узла) |
|
1.4 |
Шины: |
|
|
Радиус качения эталонного образца Re под воздействием эталонной вертикальной реакции Ре . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
1.5 |
Активизирующее устройство: |
|
|
Изготовитель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип (плунжерный тормозной цилиндр/диафрагменная тормозная камера)1) |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Плечо рычага le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
1.6 |
Устройство автоматической регулировки тормоза 3): |
|
|
Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модификация . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
___________ 1) Ненужное зачеркнуть. 2) Только для дисковых тормозов. 3) Не заполняют, если устройство интегрировано в тормозной привод или отсутствует. |
2 Результаты испытаний, скорректированные для коэффициента сопротивления качению, равного 0,01 (форма протокола)
2.1 Для прицепов категорий O2 и O3:
|
Испытание типа: |
Тип-0 |
Тип-I |
|
|
Пункты дополнения 2 к приложению Л, определяющие условия проведения испытаний: |
3.5.1.2 |
3.5.2.2/3.5.2.3 |
3.5.2.4 |
|
Показатели: |
|||
|
Скорость, км/ч |
40 |
40 |
40 |
|
Давление в тормозной камере ре, бар |
|
- |
- |
|
Время торможения, мин |
- |
2,55 |
- |
|
Тормозная сила Те, Н |
|
|
|
|
Эффективность торможения (удельное замедление) Те /9,81 Ре |
|
|
|
|
Ход штока тормозной камеры se, мм |
|
- |
|
|
Момент на входе в тормоз, Н·м: |
|
- |
|
|
Ce |
|
- |
|
|
Co, e |
|
- |
|
2.2 Для прицепов категории О4
|
Испытание типа: |
Тип-0 |
Тип-III |
|
|
Пункты дополнения 2 к приложению Л, определяющие условия проведения испытаний: |
3.5.1.2 |
3.5.3.1 |
3.5.3.1.2 |
|
Показатели: |
|||
|
Скорость км/ч: начальная |
60 |
|
60 |
|
конечная |
|
|
|
|
Давление в тормозной камере ре, бар |
|
- |
|
|
Число активизаций тормоза |
- |
20 |
- |
|
Продолжительность цикла торможения, с |
- |
60 |
- |
|
Тормозная сила Те, Н |
|
|
|
|
Эффективность торможения (удельное замедление) Тe/9,81 Ре |
|
|
|
|
Ход штока тормозной камеры se, мм |
|
- |
|
|
Момент на входе в тормоз, Н·м: |
|
|
|
|
Ce |
|
- |
|
|
Co, e |
|
- |
|
2.3 Настоящий пункт заполняют только в том случае, когда тормоз был подвергнут испытанию, описанному в Ф.4 (приложение Ф), с целью проверить эффективность тормоза с помощью коэффициента торможения BF. При этом коэффициент торможения определяют как коэффициент усиления тормозного момента на выходе по отношению к тормозному моменту на входе.
2.3.1 Коэффициент торможения BF
3 Эффективность устройства автоматической регулировки тормоза (в случае применения)
3.1 Свободное качение
(в соответствии с 3.6.3 дополнения 2 к приложению Л), да/нет1)
4 Настоящее испытание было выполнено и результаты получены в соответствии с дополнением 2 к приложению Л и, там, где это применимо, в соответствии с Ф.4 (приложение Ф).
Испытательная лаборатория, выполнившая испытания
Подписи . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Дата . . . . . . . . . . . . . . . . . . . . . .
52) В результате испытания, описанного в 3.6 дополнения 2 к приложению Л, соответствие требованиям 5.2.2.8.1 настоящего стандарта было/не было1) подтверждено.
___________
1) Не нужное зачеркнуть
2) Подлежит заполнению только при наличии устройства автоматической регулировки тормоза.
Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Дата . . . . . . . . . . . . . . . . . . . . . .
Дополнение 4 к
приложению Л
Форма отчета об испытаниях
альтернативного устройства автоматической регулировки тормоза
(в соответствии с 3.7.3 дополнения 2 к
приложению Л)
|
ОТЧЕТ ОБ ИСПЫТАНИИ №_______________ |
|
|
1 Техническое описание объекта испытания |
|
|
1.1 |
Ось: |
|
|
Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Партия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Технически допустимая максимальная нагрузка Ре . . . . . . . . . . . . . . . . . . . . . . . . . . . . .даН |
|
|
Отчет об испытании № . . . . .в соответствии с дополнением 3 к приложению Л |
|
1.2 |
Тормоз: |
|
|
Марка . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тормозная накладка |
|
|
Марка/Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
1.3 |
Активизирующее устройство: |
|
|
Тип (плунжерный тормозной цилиндр/тормозная камера)1) |
|
|
Марка . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Длина плеча рычага l . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм |
|
1.4 |
Устройство автоматической регулировки тормоза: |
|
|
Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Марка . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
Модификация . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
2 Результаты испытаний 2.1 Эффективность устройства автоматической регулировки тормоза: 2.1.1 Эффективность «горячего» торможения рабочими тормозными системами, определяемая в испытании, описанном в 3.6.2.1, перечисление а) дополнения 2 к приложению Л ГОСТ Р 41.13-2007 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . % или ход штока тормозной камеры, sA, определяемый в испытании, описанном в 3.6.2.1, перечисление б) дополнения 2 к приложению Л ГОСТ Р 41.13-2007 . . . . . . . . . . . . . . . . . . . мм 2.1.2 Свободное вращение в соответствии с 3.6.3 дополнения 2 к приложению Л ГОСТ Р 41.13-2007 да/нет1). 3 Наименование испытательной лаборатории, проводящей испытание . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Дата проведения испытания . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Настоящее испытание проведено, и результаты представлены в соответствии с 3.6.2 дополнения 2 к приложению Л ГОСТ Р 41.13-2007. 6 Проведенное испытание дает основание считать, что требования 5.2.2.8.1 Р 41.13-2007 выполнены/не выполнены 1). 7 Испытательная лаборатория, выполнившая испытанияПодпись. . . . . . . . . . . . . . . . . . . . . . . . Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . ________ 1) Не нужное зачеркнуть.
|
|
Приложение М
(обязательное)
Условия проведения испытаний транспортных средств, укомплектованных инерционными тормозными системами
М.1 Общие положения
М.1.1 Инерционная тормозная система прицепа включает в себя управляющее устройство, тормозной привод и колесные тормоза (далее - тормоза).
М.1.2 Управляющее устройство инерционной тормозной системы (далее - управляющее устройство) представляет собой комплект деталей, интегрированных с тягово-сцепным устройством (соединительной головкой).
М.1.3 Тормозной привод представляет собой комплект деталей, расположенных между соединительной головкой и тормозом.
М.1.4 Тормоз представляет собой конструктивный узел, в котором возникает сила, препятствующая движению ТС. Входной элемент тормоза - это либо рычаг, воздействующий на кулачок тормоза или подобные детали (в случае инерционной тормозной системы с механическим приводом), либо тормозной цилиндр (в случае инерционной тормозной системы с гидравлическим приводом).
М.1.5 Тормозные системы, в которых аккумулированная энергия (электрическая, пневматическая или гидравлическая) передается на прицеп от буксирующего ТС и регулируется исключительно толкающим усилием в соединительной головке, не относятся, применительно к требованиям настоящего стандарта, к инерционным тормозным системам.
М.1.6 Испытания
Проводят следующие испытания:
М.1.6.1 определение характеристик важнейших элементов тормоза;
М.1.6.2 определение характеристик важнейших элементов управляющего устройства и проверку его соответствия требованиям настоящего стандарта;
М.1.6.3 проверку на ТС:
а) совместимости управляющего устройства и тормоза и
б) тормозного привода.
М.2.1 Единицы измерения
М.2.1.1 Масса, кг.
М.2.1.2 Сила, Н.
М.2.1.3 Ускорение силы тяжести, g = 10 м/с2.
М.2.1.4 Момент, Н·м.
М.2.1.5 Площадь, см2.
М.2.1.6 Давление, бар.
М.2.1.7 Длина. Единица длины зависит от конкретного измеряемого объекта.
М.2.2 Обозначения, применяемые к инерционным тормозам всех типов (см. рисунок М.1)
|
М.2.2.1 |
GA |
- максимальная масса прицепа (см. 2.17). |
|
М.2.2.2 |
G'a |
- максимальная масса прицепа, заявленная изготовителем, приходящаяся на тормоза, активизируемые управляющим устройством. |
|
М.2.2.3 |
GB |
- максимальная масса прицепа, приходящаяся на все тормоза прицепа при их совместной активизации: GB = nGB0. |
|
GB0 |
- часть максимальной массы прицепа, заявленной изготовителем, приходящаяся на один тормоз. |
|
|
М.2.2.5 |
В* |
- тормозная сила, необходимая для торможения с предписанной эффективностью. |
|
М.2.2.6 |
В |
- тормозная сила, необходимая для торможения с предписанной эффективностью с учетом сопротивления качению. |
|
М.2.2.7 |
D* |
- допустимая толкающая сила в сцепном устройстве. |
|
М.2.2.8 |
D |
- толкающая сила в сцепном устройстве. |
|
М.2.2.9 |
P' |
- сила на выходе из управляющего устройства. |
|
К |
- дополнительная сила в управляющем устройстве, обычно определяемая как сила D, соответствующая точке пересечения оси абсцисс с экстраполированной зависимостью Р' от D, измеренная в управляющем устройстве в середине перемещения (см. рисунки М.2 и М.3). |
|
|
М.2.2.11 |
КA |
- пороговое усилие в управляющем устройстве, а именно максимальное толкающее усилие в соединительной головке, которое может быть приложено на короткое время без возникновения какой-либо силы на выходе из управляющего устройства. Обозначение КA обычно применяют к усилию, измеренному в начале возвращения соединительной головки в исходное положение со скоростью 10-15 мм/с при отсоединенном от управляющего устройства приводе. |
|
М.2.2.12 |
D1 |
- максимальная сжимающая сила, прилагаемая к соединительной головке, в начале возвращения к исходному положению при скорости, равной (s ± 10 %) мм/с, и отсоединенном приводе. |
|
М.2.2.13 |
D2 |
- максимальная выталкивающая сила, прилагаемая к соединительной головке при скорости движения в направлении от положения максимального сжатия (s ± 10 %) мм/с и отсоединенном приводе. |
|
М.2.2.14 |
ηН0 |
- эффективность управляющего устройства. |
|
М.2.2.15 |
ηН1 |
- эффективность тормозного привода. |
|
М.2.2.16 |
ηН |
- общая эффективность управляющего устройства и тормозного привода ηН = ηН0 ηН1. |
|
М.2.2.17 |
s |
- перемещение привода управляющего устройства, мм. |
|
М.2.2.18 |
s' |
- рабочее перемещение привода управляющего устройства, мм, необходимое для функционирования системы, в соответствии с М.9.4. |
|
s" |
- дополнительное перемещение главного цилиндра, измеренное на соединительной головке, мм. |
|
|
М.2.2.19.1 |
sHz |
- ход главного цилиндра в соответствии с рисунком М.8, мм. |
|
М.2.2.19.2 |
s"hz |
- дополнительное перемещение главного цилиндра в соответствии с рисунком М.8, мм |
|
М.2.2.20 |
s0 |
- холостое перемещение, а именно перемещение соединительной головки, мм, когда она приведена в действие таким образом, что движется с уровня, расположенного на 300 мм выше горизонтали, на уровень, расположенный на 300 мм ниже горизонтали, при этом элементы тормозного привода остаются неподвижными. |
|
М.2.2.21 |
2sB |
- зазор между тормозными колодками и тормозным барабаном (ход колодок до начала действия тормоза), мм, измеренный по диаметру, параллельно устройству, прижимающему колодки, при условии, что положение колодок не регулируют в процессе испытания. |
|
2s*B |
- минимальный зазор между колодками и тормозным барабаном (минимальный ход колодок до их контакта с барабаном) для барабанных колесных тормозов, мм:
где 2r - диаметр тормозного барабана, мм (см. рисунок М.4); для дисковых колесных тормозов с гидравлическим приводом:
где V60 - объем жидкости, см3, поглощаемой одним колесным тормозом при давлении, соответствующем тормозной силе 1,2B* = 0,6 GB0, и максимальном радиусе шины; 2rА - наружный диаметр тормозного диска, мм; FRz - см2 (см. М.2.4.3). |
|
|
M* |
- тормозной момент, заявленный изготовителем (см. раздел 5 дополнения 3 к настоящему приложению). Этот тормозной момент должен формировать тормозную силу не меньшую, чем предписанная тормозная сила В*. |
|
|
М.2.2.23.1 |
MT |
- тормозной момент, полученный в испытании, если защита от инерционной перегрузки не установлена (см. М.6.2.1). |
|
М.2.2.24 |
R |
- динамический радиус качения колеса, м. |
|
М.2.2.25 |
n |
- число тормозов прицепа. |
|
М.2.2.26 |
Mr |
- максимальный тормозной момент, получающийся в результате максимально допустимого перемещения sr или образования максимально допустимого объема Vr при движении прицепа назад (с учетом сопротивления качению, равного 0,01g·GB0). |
|
М.2.2.27 |
sr |
- максимально допустимое перемещение, измеренное на рычаге управления тормозом при движении прицепа назад. |
|
М.2.2.28 |
Vr |
- максимально допустимый объем жидкости, заполняющей тормозной цилиндр одного затормаживаемого колеса при движении прицепа назад. |
|
М.2.2.29 |
Dа |
- сила, приложенная со стороны входа в управляющее устройство, при которой активизируется защита от инерционной перегрузки. |
|
M.2.2.30 |
МА |
- тормозной момент, при котором активизируется защита от инерционной перегрузки. |
|
М.2.3 Обозначения, применяемые для тормозных систем с механическим приводом (см. рисунок М.5) |
||
|
М.2.3.1 |
iН0 |
- понижающий коэффициент между перемещением соединительной головки и перемещением рычага со стороны выхода из управляющего устройства. |
|
М.2.3.2 |
iН1 |
- понижающий коэффициент между перемещением рычага со стороны выхода из управляющего устройства и перемещением рычага тормоза (понижающее передаточное число тормозного привода). |
|
М.2.3.3 |
iН |
- понижающий коэффициент между перемещением соединительной головки и перемещением рычага тормоза: iН = iН0 iН1. |
|
ig |
- понижающий коэффициент между перемещением рычага тормоза и выбираемым зазором в центре тормозной колодки (см. рисунок М.4). |
|
|
М.2.3.5 |
Р |
- сила, приложенная к рычагу управления тормозом (см. рисунок М.4). |
|
М.2.3.6 |
Р0 |
- сила растормаживания при движении прицепа вперед, определяемая зависимостью М = f(P), а именно значение силы Р в точке пересечения экстраполяции этой зависимости с абсциссой (см. рисунок М.6). |
|
М.2.3.6.1 |
Р0r |
- сила растормаживания при движении прицепа назад (см. рисунок М.6). |
|
М.2.3.7 |
Р* |
- сила, приложенная к рычагу управления тормозом и вызывающая появление тормозной силы В*. |
|
М.2.3.8 |
РТ |
- испытательная сила (см. М.6.2.1). |
|
М.2.3.9 |
ρ |
- характеристика тормоза при движении прицепа вперед, определяемая из равенства М = ρ(Р-Р0). |
|
М.2.3.9.1 |
ρr |
- характеристика тормоза при движении прицепа назад в соответствии с равенством Мr = ρr(Рr-Р0). |
|
М.2.4 Обозначения, применяемые для описания тормозных систем с гидравлическим приводом (см. рисунок М.8) |
||
|
М.2.4.1 |
ih |
- понижающий коэффициент между перемещением соединительной головки и перемещением плунжера в главном цилиндре. |
|
М.2.4.2 |
i'g |
- понижающий коэффициент между перемещением выталкивающей точки в колесном цилиндре и выбираемым зазором в центре тормозной колодки. |
|
FRz |
- для барабанных тормозов - площадь плунжера одного колесного цилиндра; для дисковых тормозов - суммарная площадь плунжеров суппорта с одной стороны диска. |
|
|
М.2.4.4 |
FHz |
- площадь плунжера главного цилиндра. |
|
М.2.4.5 |
p |
- гидравлическое давление в главном цилиндре. |
|
М.2.4.6 |
р0 |
- давление растормаживания в колесном цилиндре при перемещении прицепа вперед, определяемое зависимостью М = f(p), а именно значение давления р в точке пересечения экстраполяции этой зависимости с абсциссой (см. рисунок М.7). |
|
М.2.4.6.1 |
р0r |
- давление растормаживания при движении прицепа назад (см. рисунок М.7). |
|
М.2.4.7 |
p* |
- гидравлическое давление в колесном цилиндре, вызывающее появление тормозной силы В*. |
|
М.2.4.8 |
pт |
- испытательное давление (см. М.6.2.1). |
|
М.2.4.9 |
ρ' |
- характеристика тормоза при движении прицепа вперед, определяемая из равенства: М = ρ'(р-р0). |
|
М.2.4.9.1 |
ρ'r |
- характеристика тормоза при движении прицепа назад, определяемая из равенства: М = ρ'r(рr-р0r). |
|
М.2.5 Обозначения, применяемые для описания тормозных систем при наличии защиты от инерционных перегрузок |
||
|
М.2.5.1 |
D0р |
- сила, приложенная со стороны входа в управляющее устройство, при которой активизируется защита от инерционных перегрузок. |
|
М.2.5.2 |
M0p |
- тормозной момент, при котором активизируется защита от инерционных перегрузок (декларируется изготовителем). |
|
М.2.5.3 |
MТ0p |
- - минимальный тормозной момент, полученный в испытании, в случае установки защиты от инерционных перегрузок (см. М.6.2.2.2). |
|
М.2.5.4 |
Р0р_min |
- - сила, приложенная к тормозу, при которой активизируется защита от инерционной перегрузки (М.6.2.2.1). |
|
М.2.5.5 |
Р0р_max |
- максимальная толкающая сила (когда соединительная головка перемещается до отказа), прилагаемая к тормозу со стороны устройства защиты от инерционных перегрузок (см. М.6.2.2.3). |
|
М.2.5.6 |
Р0р_min |
- давление, действующее на тормоз, при котором активизируется устройство защиты от инерционных перегрузок. |
|
М.2.5.7 |
Р0р_max |
- максимальное гидравлическое давление (когда соединительная головка перемещается до отказа), прилагаемое к тормозу со стороны устройства защиты от инерционных перегрузок (см. М.6.2.2.3). |
|
М.2.5.8 |
PТ0p |
- минимальная тормозная сила, полученная в испытании, в случае установки защиты от инерционных перегрузок (см. М.6.2.2.2). |
|
М.2.5.9 |
pТ0p |
- минимальное давление, полученное в испытании, действующее на тормоз, в случае установки защиты от инерционных перегрузок (см. М.6.2.2.2). |
М.3.1 Передача силового воздействия от соединительной головки к тормозам прицепа должна быть осуществлена либо системой тяг и рычагов, либо одной или несколькими рабочими жидкостями (газами). Однако часть тормозного привода может составлять трос, заключенный в оболочку1). Эта часть привода должна иметь наименьшую возможную длину.
___________
1) Боуденовский трос.
М.3.2 Все шкворни (оси) сочленений должны быть соответствующим образом защищены. Кроме того, эти сочленения должны либо быть самосмазывающимися, либо легкодоступными для смазки.
М.3.3 Инерционные тормозные системы должны быть сконструированы так, чтобы в процессе движения соединительной головки к своему максимально «растянутому» состоянию ни одна из частей тормозного привода не защемлялась, не подвергалась постоянному перекосу или сопротивлению. Это условие должно быть проверено при отсоединении концевой части тормозного привода от рычагов управляющего устройства.
М.3.4 Инерционная тормозная система должна позволять прицепу совместно с буксирующим ТС двигаться задним ходом без возникновения тормозной силы, превышающей 0,08gGA. Устройства, используемые для этого, должны автоматически активизироваться при движении назад и автоматически прекращать свое действие, когда прицеп начинает двигаться вперед.
М.3.5 Любое специальное устройство, встроенное в инерционную тормозную систему для выполнения требований М.3.4, должно быть таким, чтобы контакт прицепа с откосом (барьером) в процессе парковки не привел к повреждениям.
М.3.6 Инерционные тормозные системы могут включать в себя защитные устройства, предохраняющие от инерционной перегрузки. Эти устройства не должны активизироваться при воздействии силы D0р < 1,2D* - при установке устройства на соединительной головке, или силы Р0р < 1,2Р* или давления р0р < 1,2р* - при установке устройства на колесном тормозе, где сила Р* и давление р* соответствуют тормозной силе В* = 0,5 gGB0.
М.4 Требования к управляющим устройствам
М.4.1 Скользящие элементы привода управляющего устройства должны иметь длину, достаточную для выполнения полного рабочего хода, в том числе и при сочленении прицепа с буксирующим ТС.
М.4.2 Скользящие элементы должны быть защищены гофрированными оболочками или подобными им устройствами. Они должны быть смазаны или изготовлены из самосмазывающихся материалов. Трущиеся поверхности должны быть изготовлены из таких материалов, чтобы электрохимические реакции между ними или их механическая несовместимость не приводила(ли) к заеданию скользящих элементов.
М.4.3 Пороговое усилие КА на управляющем устройстве должно находиться в пределах:
0,02 gG'A ≤ КА ≤ 0,04 gG'A.
М.4.4 Максимальная сила вталкивания D1 должна быть: D1 ≤ 0,10 gGA для прицепов с жесткими дышлами и D1 ≤ 0,067 gG'A для многоосных прицепов с дышлами на шарнирах.
М.4.5 Максимальная тяговая сила D2 должна находиться в пределах:
0,5 gG'A ≤ D2 ≤ 0,1 gG'A.
М.5 Испытания и измерения, которые необходимо выполнить на управляющих устройствах
М.5.1 Управляющие устройства, представляемые в испытательную лабораторию для проведения испытаний, должны быть проверены на соответствие требованиям разделов М.3 и М.4.
М.5.2 На тормозах всех типов необходимо измерить следующие параметры:
М.5.2.1 перемещение s и эффективное перемещение s';
М 5.2.2 дополнительную силу в управляющем устройстве К;
М.5.2.3 пороговое усилие в управляющем устройстве КА;
М.5.2.4 сжимающую силу D1;
М.5.2.5 растягивающую силу D2.
М.5.3 В случае инерционных тормозных систем с механическим приводом необходимо измерить следующие параметры:
М.5.3.1 понижающий коэффициент iH0;
М.5.3.2 силу на выходе из управляющего устройства Р' как функцию толкающей силы D на дышле.
Дополнительную силу К и эффективность определяют по репрезентативной кривой, получаемой в результате этих измерений
![]() (см. рисунок
М.2).
(см. рисунок
М.2).
М.5.4 В случае инерционных тормозных систем с гидравлическим приводом должны быть определены следующие параметры:
М.5.4.1 понижающий коэффициент ih;
М.5.4.2 давление на выходе из главного цилиндра р как функция толкающей силы D на дышле и площади сечения поршня главного цилиндра FHz, в соответствии сданными изготовителя. Дополнительную силу К и эффективность определяют по репрезентативной кривой, получаемой в результате этих измерений:
![]() (см. рисунок
М.3);
(см. рисунок
М.3);
М.5.4.3 дополнительное перемещение главного цилиндра s" (см. М.2.2.19);
М.5.4.4 площадь плунжера главного цилиндра FHz;
М.5.4.5 ход главного цилиндра sHz, мм;
М.5.4.6 дополнительное перемещение главного цилиндра s"Hz, мм.
М.5.5 В случае инерционной тормозной системы, установленной на многоосный прицеп с качающимся дышлом1), должно быть измерено уменьшение перемещения, описанное в М.9.4.1.
__________
1) Дышло, могущее поворачиваться на некоторый угол относительно прицепа в продольной вертикальной плоскости.
М.6.1 Вместе с тормозами, предназначенными для проверки, изготовитель должен предоставить испытательной лаборатории, проводящей испытания, чертежи тормозов, показывающие тип, размеры и материал основных элементов тормозов, а также марку и тип тормозных накладок. В случае гидравлических тормозов на этих чертежах должна быть также показана площадь колесного тормозного цилиндра FRz. Изготовитель также должен указать тормозной момент М* и массу GB0 в соответствии с М.2.2.4.
М.6.2 Условия проведения испытаний
М.6.2.1 Если устройство защиты от инерционной перегрузки не встроено в инерционную тормозную систему и не будет установлено в дальнейшем, колесный тормоз должен быть испытан под воздействием силы, момента или давления, вычисляемых следующим образом:
РТ = 1,8Р*, рТ = 1,8р*, МТ = 1,8М*.
М.6.2.2 Если устройство защиты от инерционной перегрузки встроено в инерционную тормозную систему или будет установлено в дальнейшем, колесный тормоз должен быть испытан под воздействием силы или давления, вычисляемой(ого) следующим образом:
М.6.2.2.1 минимальные значения параметров для защиты от инерционной перегрузки, обеспечиваемые конструкцией, должны быть заданы изготовителем с соблюдением следующих условий:
Р0р ≥ 1,2Р* или р0р ≥ 1,2р*;
М.6.2.2.2 минимальные значения силы РТ0р давления рТ0р или момента МТ0р, обеспечиваемые в испытаниях, должны находиться в диапазонах:
1,1Р* ≤ РТ0р ≤ 1,2Р* или 1,1р* ≤ рТ0р ≤ 1,2р*, или 1,1М* ≤ МТ0р ≤ 1,2М*;
М.6.2.2.3 максимальные значения параметров (Р0p mах или р0p mах) для устройства защиты от инерционной перегрузки должны быть установлены изготовителем и не должны превышать значений Рт или рт соответственно.
М.7 Испытания и измерения, которые должны быть выполнены на тормозах
М.7.1 Тормоза и их элементы, представленные в испытательную лабораторию, должны быть испытаны на соответствие требованиям раздела М.6.
М.7.2 Необходимо определить следующие параметры:
М.7.2.1 минимальный зазор между колодками и тормозным барабаном 2sB*;
М.7.2.2 зазор между колодками и тормозным барабаном 2sB (который должен превышать 2sB*).
М.7.3 В случае тормозов с механическим приводом необходимо определить следующие параметры:
М.7.3.1 понижающий коэффициент ig (см. рисунок М.4);
М.7.3.2 силу Р*, вызывающую появление тормозного момента М*;
М.7.3.3 момент М* как функцию силы Р*, приложенной к рычагу управления в системе с механическим приводом. Скорость вращения контактных поверхностей тормоза должна соответствовать первоначальной скорости 60 км/ч при движении прицепа вперед и 6 км/ч при движении прицепа назад. На основе кривой, полученной в результате этих измерений, определяют перечисляемые ниже параметры (см. рисунок М.6):
М.7.3.3.1 силу растормаживания Р0 и характеристику тормоза ρ при движении прицепа вперед;
М.7.3.3.2 силу растормаживания Р0r и характеристику тормоза ρr при движении прицепа назад;
М.7.3.3.3 максимальный тормозной момент Мr в конце максимально допустимого перемещения sr при движении прицепа назад (см. рисунок М.6);
М.7.3.3.4 максимально допустимое перемещение на рычаге управления тормоза при движении прицепа назад (см. рисунок М.6).
М.7.4 В случае тормозов с гидравлическим приводом необходимо определить следующие параметры:
М.7.4.1 понижающий коэффициент ig';
М.7.4.2 давление р*, соответствующее тормозному моменту М*;
М.7.4.3 тормозной момент М* как функцию давления р*, возникающего в тормозном цилиндре гидравлического привода.
Частота вращения контактных поверхностей тормоза должна соответствовать начальной скорости торможения 60 км/ч при движении прицепа вперед и 6 км/ч при движении прицепа назад. На основе кривой, полученной в результате этих измерений, определяют перечисленные ниже параметры (см. рисунок М.7):
М.7.4.3.1 давление растормаживания р0 и характеристику тормоза ρ' при движении прицепа вперед;
М.7.4.3.2 давление растормаживания р0r и характеристику тормоза ρr' при движении прицепа назад;
М.7.4.3.3 максимальный тормозной момент Мr при максимально допустимом объеме рабочей жидкости в тормозном цилиндре Vr при движении прицепа назад (см. рисунок М.7);
М.7.4.3.4 максимально допустимый объем рабочей жидкости в тормозном цилиндре Vr при движении прицепа назад (см. рисунок М.7);
М.7.4.4 площадь плунжера колесного тормозного цилиндра FRz.
М.7.5 Альтернативная процедура испытаний «Тип-I»
М.7.5.1 Испытания «Тип-I», установленные в В.1.5 (приложение В), не должны быть проведены на ТС, представленном в испытательную лабораторию, если элементы тормозной системы испытывают на инерционном тормозном стенде для подтверждения соответствия требованиям В.1.5.2 и В.1.5.3.
М.7.5.2 Альтернативная процедура испытаний «Тип-I» должна быть выполнена в соответствии с описанием в 3.5.2 дополнения 2 к приложению Л (по аналогии эта процедура применима и к дисковым тормозам).
М.8 Отчеты об испытаниях
По результатам испытаний прицепов, оборудованных инерционными тормозными системами, должны быть подготовлены отчеты об испытаниях управляющего устройства и тормозов и специальный отчет об испытании управляющего устройства, тормозного привода и собственно тормозов на совместимость. Эти отчеты должны включать в себя, как минимум, разделы, описанные в дополнениях 2, 3 и 4 к настоящему приложению.
М.9 Совместимость управляющего устройства и тормозов транспортного средства
М.9.1 Проверка должна быть проведена на ТС с целью убедиться, исходя из характеристик управляющего устройства (см. дополнение 2 к настоящему приложению), характеристик тормозов (см. дополнение 3 к настоящему приложению) и характеристик прицепа (см. раздел 4 дополнения 4 к настоящему приложению), соответствует ли инерционная тормозная система предъявляемым к ней требованиям.
М.9.2 Общие требования к тормозам всех типов
М.9.2.1 Все части тормозного привода, не подвергшиеся проверке одновременно с управляющим устройством или тормозами, должны быть проверены непосредственно на ТС. Результаты проверки должны быть внесены в отчет об испытаниях, оформленный в соответствии с дополнением 4 к настоящему приложению (например, результаты по проверке iН1 и ηН1).
М.9.2.2 Масса
М.9.2.2.1 Максимальная масса прицепа GA не должна превышать максимальную массу G'A, заявленную изготовителем, для которой предназначено управляющее устройство.
М.9.2.2.2 Максимальная масса прицепа GA не должна превышать максимальную массу GB, которая может быть заторможена при совместной активизации всех тормозов прицепа.
М.9.2.3 Силы
М.9.2.3.1 Пороговое усилие КА должно находиться в пределах:
0,02 gGA ≤ KA ≤ 0,04 gGA.
М.9.2.3.2 Максимальная сжимающая сила D1 не должна превышать 0,100 gGA для прицепов с жестким дышлом и 0,067 gGA для многоосных прицепов с качающимся дышлом.
М.9.2.3.3 Максимальная растягивающая сила D2 должна находиться в пределах:
0,1 gGA ≤ D2 ≤ 0,5 gGA.
М.9.3 Проверка эффективности торможения
М.9.3.1 Сумма тормозных сил, приложенных к наружным поверхностям колес прицепа В*, должна быть не менее В* = 0,50 gGA, включая сопротивление качению, равное 0,01 gGA, что соответствует тормозной силе В - 0,49 gGA. В этом случае максимально допустимая толкающая сила в сцепном устройстве должна быть:
D* = 0,067 gGA - в случае многоосных прицепов с качающимся дышлом:
D* = 0,100 gGA - в случае прицепов с жестким дышлом.
Чтобы проверить, выполнены ли эти условия, необходимо использовать следующие неравенства:
М.9.3.1.1 для инерционных тормозных систем с механическим приводом:
![]()
М.9.3.1.2 для инерционных тормозных систем с гидравлическим приводом:
![]()
М.9.4 Проверка перемещения привода управляющего устройства
М.9.4.1 В управляющих устройствах многоосных прицепов с качающимися дышлами, где рычажный механизм зависит от положения буксирующего устройства, полное перемещение привода управляющего устройства s должно быть больше, чем его рабочее перемещение s'. Разность перемещений должна быть не менее холостого перемещения s0. При этом холостое перемещение s0 не должно превышать 10 % рабочего перемещения s'.
М.9.4.2 Рабочее перемещение s' должно быть определено для одноосных и многоосных прицепов следующим образом:
М.9.4.2.1 если на рычажный приводной механизм тормоза влияет угловое положение буксирующего устройства, то:
s' = s - s0;
М.9.4.2.2 если холостое перемещение отсутствует, то:
s' = s;
М.9.4.2.3 для тормозных систем с гидравлическим приводом:
s' = s - s".
М.9.4.3 Для проверки адекватности перемещения привода управляющего устройства должны быть применены следующие неравенства:
М.9.4.3.1 в случае инерционных тормозных систем с механическим приводом:
![]()
М.9.4.3.2 в случае инерционных тормозных систем с гидравлическим приводом:
![]()
М.9.5 Дополнительные проверки
М.9.5.1 Проверка инерционных тормозных систем с механическим приводом должна подтвердить правильность установки рычажного механизма, с помощью которого происходит передача усилий от управляющего устройства к тормозам.
М.9.5.2 Проверка инерционных тормозных систем с гидравлическим приводом должна подтвердить, что перемещение главного цилиндра превышает s/ih. Меньшие значения перемещения не допускаются.
М.9.5.3 Общее поведение ТС при торможении должно быть проверено в дорожном испытании, выполняемом на различных скоростях движения и при различных уровнях тормозных усилий. При этом недемпфируемые самовозбуждающиеся колебания не допускаются.
М.10 Общие замечания
Изложенные выше требования применимы к большинству обычных инерционных тормозных систем с механическим или гидравлическим приводом и, в особенности, к тем из них, в которых все колеса прицепа оборудованы тормозами одного типа и одинаковыми шинами. Для проверки инерционных тормозных систем, конструкция которых отличается от обычной, изложенные выше требования должны быть адаптированы к конкретным условиям.
Дополнение 1
к приложению М
Иллюстрации

Рисунок М.1 - Условные обозначения, применимые к инерционным тормозам всех типов (см. М.2.2)
![]()
Рисунок М.2 - Зависимость силы на выходе из управляющего устройства Р' от толкающей силы в сцепном устройстве D для механического тормозного привода (см. М.2.2.10 и М.5.3.2)
![]()
Рисунок М.3 - Зависимость давления на выходе из главного тормозного цилиндра р от толкающей силы в сцепном устройстве D для гидравлического тормозного привода (см. М.2.2.10 и М.5.4.2)
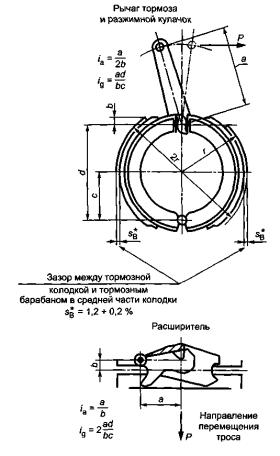
Рисунок М.4 - Обозначения, относящиеся к проверке тормоза (см. М.2.2.22 и М.2.3.4)
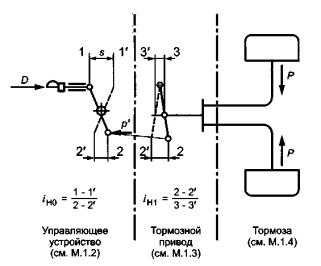
Рисунок М.5 - Схема инерционной тормозной системы с механическим приводом (см. М.2.3)
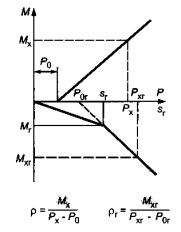
Рисунок М.6 - Характеристики инерционных тормозов с механическим приводом (см. раздел М.2)
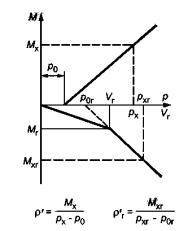
Рисунок М.7 - Характеристики инерционных тормозов с гидравлическим приводом
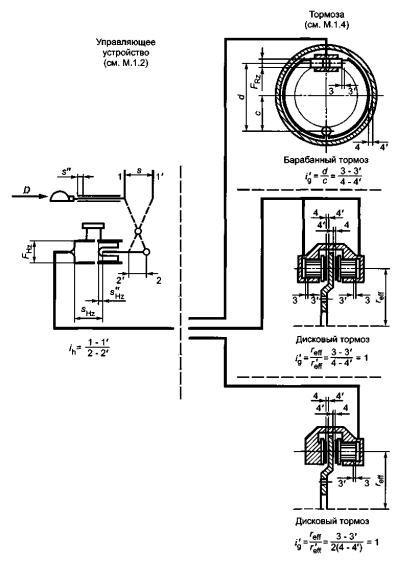
Рисунок М.8 - Схема инерционной тормозной системы с гидравлическим приводом (см. раздел М.2)
Дополнение 2
к приложению М
Отчет об испытаниях управляющего устройства инерционной тормозной системы
|
1 Изготовитель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Партия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Тип. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Характеристики прицепа, для установки на который изготовитель предназначает свое управляющее устройство: 4.1 Масса G'A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .кг 4.2 Допустимая вертикальная нагрузка на сцепное устройство . . . . . . . . . . . . . . . . . . . . . . . . . Н 4.3 Прицеп с жестким дышлом/многоосный прицеп с качающимся дышлом 1) 5 Краткое описание (включая перечень прилагаемых схем и чертежей) 6 Схема, показывающая принцип управления тормозами 7 Перемещение s = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мм 8 Понижающий коэффициент в управляющем устройстве: 8.1 при механическом тормозном приводе 1) iн0, от . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . до . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.2 при гидравлическом тормозном приводе1': ih, от . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . до . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2) fhz = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . см2 ход главного цилиндра sHz = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм дополнительное перемещение главного цилиндра s"Hz = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мм 9 Результаты испытания: 9.1 Эффективность: при механическом тормозном приводе 1) ηH = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . при гидравлическом тормозном приводе 1) ηH = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2 Дополнительная сила К = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н 9.3 Максимальная сжимающая сила D1 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н 9.4 Максимальная растягивающая сила D2 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н 9.5 Пороговое усилие КA = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н 9.6 Холостые и дополнительные перемещения: когда имеет значение положение сцепного устройства 1), s0 = . . . . . . . . . . . . . . . . . . . . . . . . . мм при гидравлическом тормозном приводе 1), s" = s"HziH = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм 9.7 Рабочее перемещение органа управления s' = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм 9.8 Устройство защиты от инерционной перегрузки (см. М.3.6) имеется/не имеется 1) 9.8.1 Если устройство защиты от инерционной перегрузки установлено перед передающим рычагом управляющего устройства: 9.8.1.1 пороговая сила активизации устройства защиты от инерционной перегрузки D0p = . . Н 9.8.1.2 в случае механического устройства защиты от инерционной перегрузки 1) максимальная сила, развиваемая устройством Р'mах/iн0 = Р0р mах = . . . . . . . . . . . . . . . . . . . . . . . Н 9.8.1.3 в случае гидравлического устройства защиты от инерционной перегрузки 1) максимальное давление, развиваемое устройством p'mах/ih = Р0р mах = . . . . . . . . . . . . . . . . . . . . Н 9.8.2 Если устройство защиты от инерционной перегрузки установлено за передающим рычагом управляющего устройства: 9.8.2.1 пороговая сила активизации устройства защиты от инерционной перегрузки при механическом устройстве 1) D0piH0 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н при гидравлическом устройстве 1) D0pih = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н 9.8.2.2 в случае механического устройства защиты от инерционной перегрузки 1) максимальная сила, развиваемая устройством Р'mах = Р0р mах = . . . . . . . . . . . . . . . . . . . . . . . . . .Н 9.8.2.3 в случае гидравлического устройства защиты от инерционной перегрузки 1) максимальное давление, развиваемое устройством p'mах = p0р mах = . . . . . . . . . . . . . . . . . . .Н/см2 10 Управляющее устройство, описанное выше, удовлетворяет/не удовлетворяет 1) требованиям разделов М.3 - М.5. Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Настоящее испытание проведено и результаты представлены в соответствии с требованиями приложения М к ГОСТ Р 41.13 - 2007. Испытательная лаборатория, выполнившая испытания Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . _____________ 1) Ненужное зачеркнуть. 2) Указывают линейные размеры, соотношение которых используют для определения iH0 или ih.
|
Дополнение 3
к приложению М
Отчет об испытаниях тормоза (тормозов)
|
1 Изготовитель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
2 Партия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
3 Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
4 Допустимая максимальная масса, приходящаяся на одно колесо GB0 = . . . . . . . . . . . . . . . . .кг |
|
|
5 Тормозной момент, установленный изготовителем (см. М.2.2.23) М* = . . . . . . . . . . . . . . Н·м |
|
|
6 Динамический радиус качения шины Rmin = . . . . . . . . . . . . . . м, Rmax = . . . . . . . . . . . . . . . . . .м |
|
|
7 Краткое описание (включая перечень прилагаемых схем и чертежей) |
|
|
8 Схема, показывающая общие принципы тормоза (тормозов) |
|
|
9 Результаты испытаний: |
|
|
Механический тормоз 1) |
Гидравлический тормоз 1) |
|
9.1 Понижающий коэффициент 2) ig = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
Понижающий коэффициент 2) i'g = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
9.2 Зазор между тормозной колодкой и барабаном/диском sB = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мм |
Зазор между тормозной колодкой и барабаном/диском sB = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мм |
|
9.3 Минимально допустимый зазор между тормозной колодкой и барабаном sB* = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм |
Минимально допустимый зазор между тормозной колодкой и барабаном sB* = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мм |
|
9.4 Сила растормаживания р0 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . н |
Давление растормаживания р0 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н/см2 |
|
9.5 Характеристика тормоза ρ = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . м |
Характеристика тормоза ρ' = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .м |
|
9.6 Устройство защиты от инерционной перегрузки (см. М.3.6) имеется/не имеется 1) |
Устройство защиты от инерционной перегрузки (см. М.3.6) имеется/не имеется1) |
|
9.6.1 Тормозной момент, при котором активизируется защита от инерционной перегрузки M0p = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н·м |
Тормозной момент, при котором активизируется защита от инерционной перегрузки M0p = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н·м |
|
9.7 Сила, вызывающая появление момента М* Р* = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н |
Давление, вызывающее появление момента М* р* = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н/см2 |
|
9.8 - |
Площадь плунжера колесного цилиндра frz = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . см2 (для дисковых тормозов) |
|
9.9 - |
Объем жидкости, поглощаемый колесным цилиндром V60 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . см3 |
|
9.10 Параметры рабочего торможения при перемещении прицепа назад (см. рисунки М.6 и М.7) |
|
|
9.10.1 Максимальный тормозной момент (рисунки М.6) Мr = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н·м |
Максимальный тормозной момент (рисунок М.7) Мr = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н·м |
|
9.10.2 Максимально допустимое перемещение на рычаге управления sr = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .мм |
Максимально допустимый объем жидкости, поглощаемый колесным цилиндром Vr = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . cм3 |
|
9.11 Дополнительные характеристики при перемещении прицепа назад (см. рисунки М.6 и М.7) |
|
|
9.11.1 Сила растормаживания Р0r = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .н |
Давление растормаживания р0r = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н/см2 |
|
9.12 Испытания в соответствии с М.7.5 (если это применимо). Результаты скорректированы с учетом сопротивления качению, равного 0,01 gGB0 9.12.1 Тормозное испытание «Тип-0»: Скорость в испытании . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .км/ч Удельная тормозная сила . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . % Сила управляющего воздействия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н 9.12.2 Тормозное испытание «Тип-I»: Скорость в испытании . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .км/ч Установившаяся удельная тормозная сила . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . % Время торможения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . мин Эффективность при «горячих» тормозах (в процентах (%) значения аналогичного параметра, полученного в испытании «Тип-0») . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .% Сила управляющего воздействия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н 10 Описанный выше тормоз удовлетворяет/не удовлетворяет 1) требованиям и условиям, установленным в разделах М.3 и М.6 для инерционных тормозных систем. Тормоз может/не может 1) быть использован для инерционной тормозной системы без устройства защиты от инерционной перегрузки. Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Испытательная лаборатория, выполнившая испытания: Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ___________ 1) Ненужное зачеркнуть. 2) Указывают линейные размеры, соотношение которых используют для определения ig или i'g.
|
|
Дополнение 4
к приложению М
Отчет об испытаниях совместимости управляющего устройства, тормозного привода и тормозов прицепа, входящих в инерционную тормозную систему
|
1 |
Управляющее устройство . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . , |
|
|
описанное в прилагаемом отчете (см. дополнение 2 к приложению М) Примененный понижающий коэффициент 1) 2): iH0 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . или ih = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (должен быть в пределах, выбранных в соответствии с 8.1 или 8.2 дополнения 2 к приложению М) |
|
2 |
Тормоза . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . , описанные в прилагаемом отчете (см. дополнение 3 к приложению М) |
|
3 |
Тормозной привод, расположенный на прицепе: |
|
3.1 |
Краткое описание с принципиальной схемой |
|
3.2 |
Понижающий коэффициент или эффективность механического тормозного привода на прицепе1) iH1 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ηH1 = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
4 |
Прицеп: |
|
4.1 |
Изготовитель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
4.2 |
Партия . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
4.3 |
Тип . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
4.4 |
Тип сочленения 1): прицеп с жестким дышлом или многоосный прицеп с качающимся дышлом |
|
4.5 |
Число тормозов n = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
4.6 |
Допустимая максимальная масса GA = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .кг |
|
4.7 |
Динамический радиус качения шины R = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .м |
|
4.8 |
Допустимое толкающее усилие в сочленении 1): D* = 0,100 gGA = . . . . . . . . . . . . . . . . . . . . . . . .Н, или D* = 0,067 gGA = . . . . . . . . . . . . . . . . . . . . . . . .Н |
|
4.9 |
Требуемая тормозная сила В* = 0,5 gGA = . . . . . . . . . . . . . . . . . . . Н |
|
4.10 |
Тормозная сила В = 0,49 gGA = . . . . . . . . . . . . . . . . . . . . . . . . . . . . Н |
|
5 |
Совместимость. Результаты испытания: |
|
5.1 |
Пороговое усилие 100 КА/gGA = . . . . . . . . . . . . . . . . . . . . . . . . . . . .% (должно быть в диапазоне от 2 до 4) |
|
5.2 |
Максимальная сжимающая сила 100 D1/gGA = . . . . . . . . . . . . . . . . % (не должна превышать 10 % для прицепов с жестким дышлом и 6,7 % для многоосных прицепов с качающимся дышлом) |
|
5.3 |
Максимальная тяговая сила 100 D2/gGA = . . . . . . . . . . . . . . . . . . . . .% (должна быть в диапазоне от 10 % до 50 %) |
|
5.4 |
Допустимая максимальная масса, относящаяся к тормозам, на которые действует управляющее устройство инерционного тормоза: G'A = . . . . . . . . . . . .. . . . . . . . . . кг (должна быть не менее GA) |
|
5.5 |
Допустимая максимальная масса, относящаяся ко всем тормозам прицепа: GB = nGB0 . . . . . . . . . . . . . . . . . кг (должна быть не менее GA) |
|
5.6 |
Тормозной момент на прицепе: nMmax/BR = . . . . . . . . . . . . . . . . . (должен быть не менее 1,0) |
|
5.6.1 |
Защита от перегрузки, указанная в М.3.6, установлена/не установлена 1) на управляющем устройстве инерционного тормоза/непосредственно на тормозах1): |
|
5.6.1.11) |
в случае установки механической защиты от перегрузки на управляющем устройстве инерционного тормоза: отношение nР*/iН1ηН1Р*mах = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (должно быть не менее 1,2) |
|
5.6.1.21) |
в случае установки гидравлической защиты от перегрузки на управляющем устройстве инерционного тормоза: отношение р*/р*mах =. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (должно быть не менее 1,2) |
|
5.6.1.31) |
в случае установки защиты от перегрузки на управляющем устройстве инерционного тормоза: пороговое усилие D0p/D* = . . . . . . . . . . . . . . . . . . . . (должно быть не менее 1,2)
|
|
5.6.1.41) |
в случае установки защиты от перегрузки на тормозе: пороговый момент пМ0p/BR = . . . . . . . . . . . . . . . . . . . . . (должен быть не менее 1,2) |
|
5.7 |
Инерционная тормозная система с механическим тормозным приводом1): |
|
5.7.1 |
iH = iH0 iH1 = . . . . . . . . . . . . . . . . . . . . . . |
|
5.7.2 |
ηH = ηH0 ηH1 = . . . . . . . . . . . . . . . . . . . . . . |
|
5.7.3 |
Выражение
(должно быть не более iн) |
|
5.7.4 |
Отношение
(должно быть не более iн) |
|
5.7.5 |
Отношение s'/iн = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (должно быть не менее sr) |
|
5.7.6 |
Тормозной момент при движении прицепа назад, включая сопротивление качению 0,08 gGA R = . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н·м (должен быть не более п Мr) |
|
5.8 |
Инерционная тормозная система с гидравлическим тормозным приводом 1) |
|
5.8.1 |
Отношение ih/FHz = . . . . . . . . . . . . . . . .. . . . . . . . |
|
5.8.2 |
Выражение (должно быть не более ih/FHz) |
|
5.8.3 |
Отношение (должно быть не менее ih/FHz) |
|
5.8.4 |
Отношение s/ih = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (должно быть не более, чем ход активизатора главного цилиндра в соответствии с 8.2 дополнения 2 к настоящему приложению) |
|
5.8.5 |
Отношение s'/FHz = . . . . . . . . . . . . . . . . . . . . . . . . . . . . при движении прицепа вперед (должно быть не более Vr) |
|
5.8.6 |
Тормозной момент при движении прицепа назад, с учетом сопротивления качению: 0,08 gGAR = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Н·м (должен быть не более п Мr) |
|
6 |
Инерционная тормозная система, описанная выше, соответствует/не соответствует 1) требованиям разделов М.3 - М.9 приложения М ГОСТ Р 41.13-2007. |
|
7 |
Настоящее испытание было выполнено и результаты представлены в соответствии с требованиями приложения М ГОСТ Р 41.13-2007. |
|
Испытательная лаборатория, выполнившая испытание Дата . . . . . . . . . . .. . . . . .. . . . . . . . . . . . . . . . Подпись . . . . . . . . . . .. . . . . .. . . . . . . . . . . . . _________ 1) Ненужное зачеркнуть. 2) Указывают линейные размеры, соотношение которых используют для определения ig или i'g. |
|
Приложение Н
(обязательное)
Транспортные средства, укомплектованные антиблокировочными системами. Технические требования и методы испытаний
Н.1 Общие положения
Н.1.1 Настоящее приложение устанавливает показатели эффективности дорожных ТС, укомплектованных АБС. Кроме того, механические ТС, которым официально разрешается буксировать прицепы, и сами прицепы должны в груженом состоянии удовлетворять требованиям совместимости, установленным в приложении К. Однако для всех вариантов нагрузки удельная тормозная сила должна изменяться в диапазоне давлений от 0,2 до 1 бар или быть эквивалентна соответствующему значению дискретного сигнала в соединительной муфте управляющей магистрали (магистралей).
Н.1.2 Известные в настоящее время АБС включают в себя датчик или датчики, контроллер или контроллеры и модулятор или модуляторы. Любое устройство, отличное от существующих, которое может появиться в будущем, или устройство, в котором антиблокировочная функция интегрирована в иную систему, считают АБС в том значении, которое придается этому понятию настоящим приложением и приложением К, если оно обеспечивает эффективность, предписываемую настоящим приложением.
Н.2 Термины и определения
Н.2.1 антиблокировочная система (anti-lock system); АБС: Часть рабочей тормозной системы, автоматически управляющая степенью проскальзывания в направлении вращения одного или более колеса транспортного средства в процессе торможения.
Н.2.2 датчик (sensor): Компонент, сконструированный для идентификации передачи на контроллер данных о характере вращения одного или более колеса транспортного средства в процессе торможения.
Н.2.3 контроллер (controller): Компонент, сконструированный для анализа данных, переданных датчиком (датчиками), и передачи сигнала в модулятор.
Н.2.4 модулятор (modulator): Компонент, сконструированный для изменения тормозной силы (тормозных сил) в соответствии с сигналом, полученным от контроллера.
Н.2.5 непосредственно контролируемое колесо (directly controlled wheel): Колесо, тормозная сила на котором изменяется в соответствии с данными, поступающими по крайней мере от одного собственного датчика 1).
Н.2.6 косвенно контролируемое колесо (indirectly controlled wheel): Колесо, тормозная сила на котором изменяется в соответствии с данными, поступающими от датчика (датчиков) другого колеса (других колес) 1).
__________
1) Подразумевают, что АБС с выборочным управлением высокого уровня включают в себя как непосредственно, так и косвенно контролируемые колеса, в то время как АБС с выборочным управлением низкого уровня включают в себя только непосредственно контролируемые колеса.
Н.2.7 полный цикл (full cycling): Принцип действия антиблокировочной системы, при котором тормозная сила многократно изменяется для предотвращения блокировки непосредственно контролируемого колеса. Если тормозная сила изменяется при остановке (блокировке) колеса однократно, то такая АБС не функционирует по данному принципу.
В случае прицепа с пневматической тормозной системой полный цикл АБС реализуется, только когда давление в каждой тормозной камере непосредственно контролируемого колеса превышает более чем на 1 бар максимальное циклическое давление, достигаемое в данном испытании. При этом максимальное питающее давление не должно превышать 8 бар.
Н.3 Типы антиблокировочных систем
Н.3.1 Механическое ТС считают оборудованным АБС в соответствии с К.1 (приложение К), если на нем установлена одна из следующих систем:
Н.3.1.1 АБС категории 1
ТС, укомплектованное АБС категории 1, должно соответствовать всем распространяющимся на него требованиям настоящего приложения.
Н.3.1.2 АБС категории 2
ТС, укомплектованное АБС категории 2, должно соответствовать всем распространяющимся на него требованиям настоящего приложения, за исключением требований Н.5.3.4 и Н.5.3.5.
Н.3.1.3 АБС категории 3
ТС, укомплектованное АБС категории 3, должно соответствовать всем распространяющимся на него требованиям настоящего приложения, за исключением требований Н.5.3.4 и Н.5.3.5. На этих ТС любая одиночная ось (или тележка), не включающая в себя по меньшей мере одно непосредственно контролируемое колесо, должна соответствовать требованиям по использованию сил сцепления и последовательности блокировок колес, указанным в приложении К и относящимся к удельным тормозным силам и нагрузкам, соответственно. Выполнение этих требований может быть проверено на дорожных поверхностях с высоким (не более 0,8) и низким (не более 0,3) коэффициентами сцепления путем изменения усилия, управляющего рабочим торможением.
Н.3.2 Прицеп считают оборудованным АБС в соответствии с К.1 (приложение К), если по меньшей мере два колеса на противоположных сторонах прицепа контролируются непосредственно, а все остальные колеса контролируются непосредственно или косвенно с помощью АБС. У полного прицепа по меньшей мере два колеса на одной передней оси и два колеса на одной задней оси должны контролироваться непосредственно, при этом каждая из этих осей должна иметь по крайней мере один независимый модулятор, а все остальные колеса должны контролироваться непосредственно или косвенно. Кроме того, прицеп, оборудованный АБС, должен удовлетворять одному из следующих условий:
Н.3.2.1 Прицеп, оборудованный АБС категории А, должен удовлетворять всем распространяющимся на нее требованиям настоящего приложения.
Н.3.2.2 Прицеп, оборудованный АБС категории В, должен удовлетворять всем распространяющимся на нее требованиям настоящего приложения, за исключением требований Н.6.3.2.
Н.4 Общие требования
Н.4.1 Водитель должен быть информирован о любой неисправности в электрической сети или аномалии в сигналах датчиков, влияющих на выполнение требований к функционированию и эффективности, предписанных в настоящем приложении, включая перебои в электроснабжении, неисправности в электропроводке к контроллеру (контроллерам), неисправности в контроллере (контроллерах) 1) и модуляторе (модуляторах), с помощью специального оптического предупреждающего сигнала. Для этой цели должен быть использован предупреждающий сигнал желтого цвета (см. 5.2.1.29.1.2).
____________
1) Изготовитель должен представить испытательной лаборатории документацию, относящуюся к контроллеру (контроллерам), в соответствии с приложением У.
Н.4.1.1 Аномалии в сигналах датчика (датчиков), которые не могут быть определены на неподвижном ТС, должны быть выявлены не позднее момента, когда скорость ТС превысит 10 км/ч 2). Однако чтобы предотвратить появление ошибочного сигнала о неисправности, когда датчик не вырабатывает сигнал скорости ТС из-за того, что колесо не вращается, проверка может быть задержана до момента, когда скорость ТС достигнет 15 км/ч, но не позднее.
____________
2) Предупреждающий сигнал может включиться на неподвижном ТС и при отсутствии неисправностей. Однако в этом случае он должен выключиться до того, как ТС достигнет скорости 10 или 15 км/ч (в зависимости от применимости соответствующего значения скорости).
Н.4.1.2 Когда АБС подключают к сети при неподвижном ТС, клапан (клапаны) пневматического модулятора с электрическим управлением должны выполнить, по крайней мере, один цикл.
Н.4.2 Механические ТС, оборудованные АБС, которым официально разрешено буксировать прицепы, также оборудованные АБС, за исключением ТС категорий М1 и N1 должны иметь отдельный оптический предупреждающий сигнал, связанный с АБС прицепа и удовлетворяющий требованиям Н.4.1. Для этой цели должен быть использован желтый предупреждающий сигнал, удовлетворяющий требованиям 5.2.1.29.2, активизируемый через штырь № 5 соединителя, соответствующего [3] и [4] 3).
____________
3) В соединителях [3] и [4] может быть применен штырь № 5 или № 7.
Н.4.3 В случае возникновения неисправности в АБС остаточная эффективность торможения должна соответствовать эффективности торможения данного ТС при неисправности в элементах тормозного привода рабочей тормозной системы (см. 5.2.1.4). Это требование не следует рассматривать как отход от требований, относящихся к запасному торможению. В случае возникновения неисправности в АБС прицепа (см. Н.4.1) остаточная эффективность торможения должна быть не менее 80 % предписанной эффективности рабочего торможения соответствующего груженого прицепа.
Н.4.4 На функционирование АБС не должны оказывать неблагоприятного воздействия электрические и магнитные поля. Для этого должно быть продемонстрировано соответствие требованиям ГОСТ Р 41.10.
Н.4.5 Для отключения АБС или изменения режима управления ею 4) не должно быть использовано устройство с ручным управлением, за исключением механических внедорожных ТС категории N2 или N3 по ГОСТ Р 52051. Если такое устройство установлено на внедорожное ТС категории N2 или N3, должны быть выполнены следующие требования:
____________
4) На устройства, изменяющие режим управления АБС, не распространяются требования Н.4.5, если в условиях измененного режима управления выполнены все требования к АБС той категории, которая установлена на ТС. Однако в этом случае должны быть выполнены требования Н.4.5.2 - Н.4.5.4.
Н.4.5.1 Механическое ТС с отключенной АБС или с режимом управления, измененным благодаря воздействию устройства, указанного в Н.4.5, должно удовлетворять всем распространяющимся на него требованиям приложения К.
Н.4.5.2 Оптический предупреждающий сигнал должен информировать водителя о том, что АБС отключена или изменен режим управления ею. Для этой цели можно использовать желтый предупреждающий сигнал о неисправности в АБС, указанный в 5.2.1.29.1.2. Предупреждающий сигнал может быть включен в постоянном или мигающем режиме.
Н.4.5.3 АБС должна автоматически переключаться/возвращаться в дорожный режим, когда устройство включения зажигания (пусковое устройство) вновь установлено в положение «включено» («движение»).
Н.4.5.4 Инструкция по эксплуатации, разработанная изготовителем, должна содержать предупреждение водителю о последствиях ручного отключения или изменения режима работы АБС.
Н.4.5.5 Устройство, указанное в Н.4.5, может, при соединении с тягачом, отключать или изменять режим управления АБС прицепа. Устанавливать отдельное устройство, предназначенное исключительно для прицепа, не допускается.
Н.4.6 ТС, оборудованные встроенной тормозной системой длительного действия, должны быть укомплектованы также АБС, воздействующей, по меньшей мере, на рабочие тормоза оси, управляемой тормозной системой длительного действия, и непосредственно на тормозную систему длительного действия, а также должны соответствовать распространяющимся на них требованиям приложения Н.
Н.5 Специальные требования, относящиеся к механическим транспортным средствам
Н.5.1 Расход энергии
Механические транспортные средства, оборудованные АБС, должны сохранять эффективность торможения, когда к рабочей тормозной системе в течение длительных периодов времени приложено полное управляющее воздействие. Соответствие этому требованию подтверждают в испытаниях, описанных ниже.
Н.5.1.1 Процедура испытаний
Н.5.1.1.1 Начальный уровень энергии в аккумуляторе (аккумуляторах) энергии должен соответствовать предписанному изготовителем. Этот уровень должен быть не менее уровня энергии, обеспечивающего предписанную эффективность рабочего торможения груженого ТС. Аккумулятор (аккумуляторы) энергии, предназначенный для вспомогательного пневматического оборудования, должен быть изолирован.
Н.5.1.1.2 Испытания проводят с начальной скорости не менее 50 км/ч на поверхности с коэффициентом сцепления не более 0,3 1) и на полностью груженом ТС. Тормоза ТС должны быть полностью активизированы в течение времени t При этом необходимо учитывать энергию, потребляемую колесами, на тормоза которых оказывается косвенное управляющее воздействие, и все колеса, непосредственно испытывающие управляющее воздействие, должны оставаться под управлением АБС.
____________
1) Пока такие поверхности для проведения испытаний не стали легкодоступными, по усмотрению испытательной лаборатории допускается использование шин с предельным износом и более высокими значениями коэффициента сцепления, вплоть до 0,4. При этом необходимо зафиксировать реально полученное значение коэффициента сцепления, тип шин и поверхности для проведения испытаний.
Н.5.1.1.3 Затем необходимо или остановить двигатель ТС, или отключить пополнение аккумуляторов энергии.
Н.5.1.1.4 Орган управления рабочим торможением должен быть полностью активизирован четыре раза подряд на неподвижном ТС.
Н.5.1.1.5 При активизации органа управления в пятый раз должно быть обеспечено торможение ТС с эффективностью не меньшей, чем предписанная для запасного торможения груженого ТС.
Н.5.1.1.6 В процессе испытаний механического ТС, официально допущенного к буксированию прицепа, оборудованного пневматической тормозной системой, питающая магистраль должна быть перекрыта и к пневматической управляющей магистрали (при ее наличии) должен быть, в соответствии с Е.1.1.2.2.3 (приложение Е), подсоединен аккумулятор энергии емкостью 0,5 л. При активизации тормозов в пятый раз, в соответствии с Н.5.1.1.5, уровень энергии, подаваемой в пневматическую управляющую магистраль, не должен быть ниже половины уровня при полной активизации и в начале испытаний.
Н.5.1.2 Дополнительные требования
Н.5.1.2.1 На ТС, подвергаемом испытанию, должен быть измерен коэффициент сцепления методом, описанным в 1.1 дополнения 2 к настоящему приложению.
Н.5.1.2.2 Тормозное испытание должно быть проведено при отсоединенном двигателе, работающем на холостом ходу, и на груженом ТС.
Н.5.1.2.3 Время торможения t, с, должно быть определено по формуле
![]() (но не
менее 15 с),
(но не
менее 15 с),
где vmax - максимальная конструктивная скорость ТС, км/ч, но не превышающая 160 км/ч.
Н.5.1.2.4 Если торможение не может быть завершено за время t в единичной фазе торможения, могут быть применены последующие фазы торможения. Максимальное число фаз торможения не должно быть более четырех.
Н.5.1.2.5 Если испытание состоит из нескольких фаз, между фазами не подводят дополнительную энергию.
Начиная со второй фазы расход энергии, соответствующий первоначальной активизации тормозов, может быть определен путем вычитания ее значения при одной полной активизации тормозов из такового при четырех полных активизациях, описанных в Н.5.1.1.4 (а также Н.5.1.1.5, Н.5.1.1.6 и Н.5.1.2.6) для каждой второй, третьей и четвертой фазы, использованной в испытании, описанном в Н.5.1.1, если это применимо.
Н.5.1.2.6 Эффективность торможения, предписываемую в Н.5.1.1.5, следует считать подтвержденной, если в конце четвертой активизации тормозов на неподвижном ТС уровень энергии в аккумуляторе (аккумуляторах) остается не ниже требуемого для запасного торможения груженого ТС.
Н.5.2 Использование силы сцепления
Н.5.2.1 Использование силы сцепления АБС учитывает реальное увеличение тормозного пути по отношению к теоретическому минимуму. Требования к АБС считают выполненными, если удовлетворено условие
ε ≥ 0,75,
где ε - коэффициент реализации силы сцепления, как определено в 1.2 дополнения 2 к приложению Н.
Н.5.2.2 Коэффициент реализации силы сцепления ε должен быть измерен на дорожных поверхностях с коэффициентами сцепления не более 0,3 1) и приблизительно 0,8 (сухая дорога) при скорости начала торможения 50 км/ч. Чтобы устранить влияние различий в температуре тормозов, рекомендуется значение удельной тормозной силы при действии АБС - zAL - рассчитывать до определения k.
_____________
1) Пока такие поверхности для проведения испытаний не стали легкодоступными, по усмотрению испытательной лаборатории допускается использование шин с предельным износом и более высокими значениями коэффициентов сцепления, вплоть до 0,4. При этом необходимо зафиксировать реально полученное значение коэффициента сцепления, тип шин и поверхности для проведения испытаний.
Н.5.2.3 Процедура испытания по определению коэффициента сцепления k и расчет коэффициента реализации силы сцепления ε должны быть проведены в соответствии с дополнением 2 к приложению Н.
Н.5.2.4 Результат использования силы сцепления АБС должен быть проверен на полностью укомплектованном ТС с АБС категории 1 или 2. Если на ТС установлена АБС категории 3, то результат использования сипы сцепления должен быть проверен только на оси (осях), на которой (которых) имеется, по меньшей мере одно колесо с непосредственно управляемым тормозами.
Н.5.2.5 Условие ε ≥ 0,75 должно быть проверено как на груженом, так и на порожнем ТС2).
_____________
2) До тех пор, пока не установлена единая процедура испытаний, данное испытание может быть применено и для ТС, оборудованных электрическими рекуперативными тормозными системами, с целью определить влияние различий в распределении тормозных сил, вызываемых воздействием автоматических функций ТС.
Испытание груженого ТС на поверхности с высоким коэффициентом сцепления допускается не проводить, если предписанное усилие на органе управления недостаточно для выполнения на этой поверхности полных циклов работы АБС.
При испытании порожнего ТС усилие на органе управления может быть увеличено до 100 даН, если максимальное усилие 3) недостаточно для цикличной работы АБС. Если усилие 100 даН недостаточно для цикличной работы, то допускается не проводить данное испытание. В случае пневматических тормозных систем допускается при проведении данного испытания не увеличивать давление воздуха выше максимального давления, определяемого предохранительным клапаном.
______________
3) Термин «максимальное усилие» означает максимальное усилие на органе управления, устанавливаемое для ТС соответствующей категории в приложении В. Усилие, превышающее «максимальное», может потребоваться для активизации АБС.
Н.5.3 Дополнительные проверки
На груженом и порожнем ТС при отсоединенном двигателе должны быть выполнены следующие проверки:
Н.5.3.1 Колеса, непосредственно управляемые АБС, не должны блокироваться на дорожной поверхности, описанной в Н.5.2.2, в случае внезапного приложения к органу управления «максимального усилия»3), при начальной скорости 40 км/ч и более высокой начальной скорости в соответствии с таблицей Н.1.
______________
3) Термин «максимальное усилие» означает максимальное усилие на органе управления, устанавливаемое для ТС соответствующей категории в приложении В. Усилие, превышающее «максимальное», может потребоваться для активизации АБС.
Таблица Н.1
|
Общая характеристика дорожной поверхности |
Транспортные средства категорий |
Максимальная начальная скорость в испытании |
|
Поверхность с высоким коэффициентом сцепления kн |
ТС всех категорий, за исключением груженых ТС категорий N2 и N3 |
0,8 vmax, но не более 120 км/ч |
|
Груженые ТС категорий N2 и N3 |
0,8 vmax, но не более 80 км/ч |
|
|
Поверхность с низким коэффициентом сцепления kL |
M1 и N1 |
0,8 vmax, но не более 120 км/ч |
|
М2, М3 и N2, за исключением седельных тягачей категории N2 |
0,8 vmax, но не более 80 км/ч |
|
|
N3 и седельные тягачи категории N2 |
0,8 vmax, но не более 70 км/ч |
Н.5.3.2 Когда ось ТС переходит с поверхности с высоким коэффициентом сцепления на поверхность с низким коэффициентом сцепления с выполнением условий
kH ≥ 0,5 и kH/kL ≥ 2 1)
___________
1) Определение значений высокого kH и низкого kL коэффициентов сцепления - в соответствии с дополнением 2 к приложению Н.
при приложении к органу управления «максимального усилия» 2), колеса, непосредственно управляемые АБС, не должны блокироваться. Скорость ТС и момент активизации тормозов должны быть рассчитаны таким образом, чтобы при АБС, функционирующей в полностью циклическом режиме на поверхности с высоким коэффициентом сцепления, переход с одной поверхности на другую был выполнен на малой и большой скоростях с соблюдением условий, изложенных в Н.5.3.1 3).
____________
2) См. сноску 3 к Н.5.3.1.
3) Цель этого испытания - проверка отсутствия блокировки колес и сохранения устойчивости ТС. Поэтому нет необходимости в полной остановке ТС на поверхности с низким коэффициентом сцепления.
Н.5.3.3 Когда ось ТС переходит с поверхности с низким коэффициентом сцепления на поверхность с высоким коэффициентом сцепления с выполнением условий
kH ≥ 0,5 и kH/kL ≥ 2
при приложении к органу управления «максимального усилия» 2), значение замедления ТС должно возрастать в течение разумного промежутка времени до соответствующего более высокого значения и первоначальное направление движения ТС не должно изменяться. Скорость ТС и момент активизации тормозов должны быть рассчитаны таким образом, чтобы при АБС, функционирующей в полностью циклическом режиме на поверхности с низким коэффициентом сцепления, переход с одной поверхности на другую был выполнен на скорости приблизительно 50 км/ч.
____________
2) См. сноску 3 к Н.5.3.1.
Н.5.3.4 Если ТС оборудовано АБС категории 1 или 2, то при попадании левых и правых колес ТС на поверхности с разными коэффициентами сцепления такими, что
kH ≥ 0,5 и kH/kL ≥ 2,
колеса, непосредственно управляемые АБС, не должны блокироваться при мгновенном приложении «максимального усилия» 2) к органу управления на скорости 50 км/ч.
____________
2) См. сноску 3 к Н.5.3.1.
Н.5.3.5 Кроме того, груженые ТС, оборудованные АБС категории 1, должны в условиях, описанных в Н.5.3.4, удовлетворять требованиям к удельной тормозной силе, предписанным в дополнении 3 к приложению Н.
Н.5.3.6 Однако в испытаниях, описанных в Н.5.3.1 - Н.5.3.5, допускается на короткое время блокировка колес. Кроме того, блокировка колес допускается при скорости ТС менее 15 км/ч. При этом блокировка колес, не управляемых непосредственно с помощью АБС, допускается при любой скорости ТС, однако такая блокировка не должна отрицательно влиять на устойчивость и управляемость ТС.
Н.5.3.7 В процессе проведения испытаний в соответствии с Н.5.3.4 и Н.5.3.5 допускаются корректирующие воздействия на рулевое управление при условии, что поворот рулевого колеса остается в пределах 120° в первые две секунды и, в целом, не превышает 240°. Кроме того, в начальный момент этих испытаний продольная плоскость симметрии ТС должна находиться над границей, разделяющей поверхности с высоким и низким коэффициентами сцепления, и в процессе испытаний ни один из элементов шин (если установлены сдвоенные колеса - наружных шин) ТС не должен пересекать эту границу 4).
_____________
4) До тех пор, пока не установлена единая процедура испытаний, данное испытание может быть применено и для ТС, оборудованных электрическими рекуперативными тормозными системами, с целью определить влияние различий в распределении тормозных сил, вызываемых воздействиями автоматических функций ТС.
Н.6 Специальные требования, относящиеся к прицепам
Прицепы, оборудованные АБС, должны быть сконструированы так, чтобы после полного приведения в действие органа управления рабочей тормозной системы в течение некоторого промежутка времени у ТС оставалось достаточно энергии для его остановки на приемлемом отрезке пути.
Н.6.1.1 Соответствие этому требованию должно быть подтверждено с помощью процедуры, описанной ниже, на прямом горизонтальном участке дороги с оптимальным коэффициентом сцепления 5) на порожнем ТС с тормозами, отрегулированными на минимально возможные зазоры, и с клапаном, распределяющим тормозные силы по осям пропорционально нагрузке (при его наличии), находящимся в позиции «laden (загрузка)» весь период проведения испытаний.
______________
5) Если коэффициент сцепления испытательного участка слишком высок, так что АБС не будет работать с полной цикличностью, испытание может быть выполнено на поверхности с более низким коэффициентом сцепления.
Н.6.1.2 В случае пневматических тормозных систем первоначальный уровень энергии в энергоаккумуляторе (энергоаккумуляторах) тормозного привода (тормозных приводов) должен быть эквивалентен давлению 0,8 бар на соединительной головке питающей магистрали прицепа.
Н.6.1.3 При начальной скорости торможения не менее 30 км/ч тормоза должны быть полностью активизированы в течение t = 15 с. При этом все колеса должны оставаться под управлением АБС. В процессе данного испытания энергоаккумулятор (энергоаккумуляторы) тормозного привода должен быть отсоединен от источника подачи дополнительной энергии.
Если отрезок времени t = 15 с не может быть выдержан в пределах единичной фазы торможения, допускается использовать последующие фазы. В процессе выполнения этих фаз энергоаккумулятор (энергоаккумуляторы) тормозного привода должен быть отсоединен от источника подачи дополнительной энергии. Начиная со второй фазы следует учитывать дополнительный расход энергии для приведения в действие тормозного привода, например, с помощью процедуры испытания, изложенной ниже.
Давление в энергоаккумуляторе (энергоаккумуляторах) в начальный момент первой фазы должно соответствовать установленному в Н.6.1.2. В начальный момент последующей фазы (последующих фаз) давление в энергоаккумуляторе (энергоаккумуляторах) после активизации тормозов должно быть не менее давления в энергоаккумуляторе (энергоаккумуляторах) в конце предыдущей фазы.
В последующей фазе (последующих фазах) должен быть учтен только период времени, начинающийся с момента, в который давление в энергоаккумуляторе (энергоаккумуляторах) устанавливается равным давлению в конце предыдущей фазы.
Н.6.1.4 В конце торможения, когда ТС остановлено, необходимо четыре раза подряд полностью активизировать орган управления рабочей тормозной системы. В процессе пятой активизации давление в рабочем контуре должно оставаться достаточным для создания суммарной силы торможения на периферии колес, равной не менее 22,5 % максимальной статической нагрузки на колеса. При этом должно быть исключено автоматическое воздействие какой-либо тормозной системы, не находящейся под управлением АБС.
Н.6.2 Реализация силы сцепления
Н.6.2.1 Тормозные системы, оборудованные АБС, считают соответствующими предъявляемым требованиям, если выполнено условие ε ≥ 0,75, где ε - коэффициент реализации силы сцепления, как определено в разделе 2 дополнения 2 к приложению Н. Выполнение этого условия должно быть подтверждено на порожнем ТС на прямом горизонтальном участке дороги с оптимальным коэффициентом сцепления1) 2)
______________
1) Если коэффициент сцепления испытательного участка слишком высок, так что АБС не будет работать с полной цикличностью, испытание может быть выполнено на поверхности с более низким коэффициентом сцепления.
2) Если прицеп укомплектован устройством, изменяющим силу торможения в зависимости от нагрузки, давление в тормозной системе, устанавливаемое устройством, должно быть увеличено, чтобы обеспечить полную цикличность работы АБС.
Н.6.2.2 Для устранения влияния разброса температур тормозов рекомендуется определять zRAL до того, как будет рассчитан kR.
Н.6.3 Дополнительные испытания
Н.6.3.1 При скорости, превышающей 15 км/ч, колеса, непосредственно управляемые АБС, не должны блокироваться, если к органу управления тормозами буксирующего ТС мгновенно приложено «максимальное усилие» 3). Выполнение этого требования должно быть проверено в условиях, описанных в Н.6.2, при скоростях начала торможения 50 и 80 км/ч.
___________
3) См. сноску 3 к Н.5.3.1.
Н.6.3.2 Условия этого пункта применимы только к прицепам, оборудованным АБС категории А. Когда правые и левые колеса контактируют с поверхностями, обеспечивающими отличающиеся одна от другой максимальные удельные тормозные силы zRALH и zRALL, при том, что
![]()
непосредственно управляемые АБС колеса не должны блокироваться после мгновенного приложения к органу управления тормозной системы буксирующего ТС на скорости 50 км/ч «максимального усилия»3). Отношение zRALH/zRALL может быть определено с помощью процедуры, описанной в разделе 2 дополнения 2 к приложению Н, или расчетом. Одновременно с выполнением этого условия порожнее ТС должно удовлетворять требованию к удельной тормозной силе, предписанному в дополнении 3 к приложению Н 2).
______________
2) Если прицеп укомплектован устройством, изменяющим силу торможения в зависимости от нагрузки, давление в тормозной системе, устанавливаемое устройством, должно быть увеличено, чтобы обеспечить полную цикличность работы АБС.
3) См. сноску 3 к Н.5.3.1.
Н.6.3.3 При скоростях, равных или превышающих 15 км/ч, допускается на короткие промежутки времени блокировка колес, непосредственно управляемых АБС; при этом на скоростях менее 15 км/ч блокировка колес допускается без ограничения времени. Блокировка колес, не находящихся под непосредственным управлением АБС, допускается на любой скорости, однако во всех случаях блокировка колес не должна оказывать отрицательного влияния на устойчивость ТС.
Дополнение 1
к приложению Н
Обозначения и наименования показателей
E - колесная база;
ER - расстояние между осью сцепного шкворня и осью или осями полуприцепа (или расстояние между осью сцепного устройства на дышле и центральной точкой оси или осей прицепа с центральной осью);
ε - коэффициент реализации силы сцепления на ТС: частное от деления максимальной удельной тормозной силы при активизации АБС zAL на коэффициент сцепления k;
εi - коэффициент реализации силы сцепления ε, измеренный на i-й оси (в случае механического ТС, укомплектованного АБС категории 3);
εн - коэффициент реализации силы сцепления ε, измеренный на опорной поверхности с высоким коэффициентом сцепления;
εL - коэффициент реализации силы сцепления е, измеренный на опорной поверхности с низким коэффициентом сцепления;
F - сила, выраженная в ньютонах (Н);
FbR - сила торможения на прицепе с отключенной АБС;
FbRmax - максимальное значение FbR;
FbRmaxi - значение FbRmax при условии, что активизированы тормоза только i-й оси прицепа;
FbRAL - сила торможения на прицепе с активизированной АБС;
FCnd - суммарная статическая вертикальная реакция со стороны дорожной поверхности на нетормозящие неведущие оси комбинации ТС;
FCd - суммарная статическая вертикальная реакция со стороны дорожной поверхности на нетормозящие ведущие оси комбинации ТС;
Fdyn - вертикальная реакция со стороны дорожной поверхности при движении ТС с активизированной АБС;
Fidyn - Fdyn на i-й оси механического ТС или полного прицепа;
Fi - вертикальная статическая реакция со стороны дорожной поверхности на i-ю ось;
FM - суммарная вертикальная статическая реакция со стороны дорожной поверхности на все колеса механического (буксирующего) ТС;
FMnd 1) - суммарная статическая вертикальная реакция со стороны дорожной поверхности на нетормозящие неведущие оси механического ТС;
FMd 1) - суммарная статическая вертикальная реакция со стороны дорожной поверхности на нетормозящие ведущие оси механического ТС;
FR - суммарная статическая вертикальная реакция со стороны дорожной поверхности на все оси прицепа;
FRdyn - суммарная динамическая вертикальная реакция со стороны дорожной поверхности на ось (оси) полуприцепа или прицепа с центральной осью;
FWM 1) - 0,01FMnd + 0,015FMd;
g - ускорение силы тяжести (9,81 м/с2);
h - высота центра масс, установленная изготовителем и согласованная с испытательной лабораторией;
hD - высота дышла (высота оси качения дышла) на прицепе;
hk - высота седельно-сцепного устройства (сцепного шворня);
hR - высота центра масс прицепа;
k - коэффициент сцепления в контакте шины с дорогой;
kf - коэффициент сцепления на одной передней оси;
kн - коэффициент сцепления, полученный на поверхности с высокими сцепными свойствами;
ki - коэффициент сцепления k, измеренный на i-й оси укомплектованной АБС категории 3;
kL - коэффициент сцепления, полученный на поверхности с низкими сцепными свойствами;
klock - коэффициент сцепления при степени проскальзывания 100 %;
kM - коэффициент сцепления на механическом ТС;
kpeak - максимальное значение коэффициента сцепления на кривой «коэффициент сцепления в зависимости от степени проскальзывания»;
kr - коэффициент сцепления на одной задней оси;
kR - коэффициент сцепления на прицепе;
Р - масса единичного ТС (кг);
R - отношение kpeak/klock;
t - отрезок времени (с);
tm - среднее значение t;
tmin - минимальное значение t;
z - удельная тормозная сила;
zAL - удельная тормозная сила z на ТС с активизированной АБС;
zc - удельная тормозная сила z комбинации ТС при активизации только тормозов прицепа и неработающей АБС;
zCAL - удельная тормозная сила z на комбинации ТС при активизации только тормозов прицепа и его АБС;
zcmax - максимальное значение zc;
zcmaxi - максимальное значение zc при активизации тормозов только одной i-й оси прицепа;
zm - средняя удельная тормозная сила;
zmax - максимальное значение z;
zmals - zal механического ТС на «скользкой поверхности»;
zR - удельная тормозная сила z на прицепе с неактивизированной АБС;
zRAL - zAL на прицепе при активизации тормозов всех его осей (тормоза буксирующего ТС не активированы и его двигатель отсоединен);
zralh - zraL, измеренная на поверхности с высоким коэффициентом сцепления;
zrall - zral, измеренная на поверхности с низким коэффициентом сцепления;
zralS - zral измеренная на «скользкой поверхности»;
zRH - zR, измеренная на поверхности с высоким коэффициентом сцепления;
zRL - zR, измеренная на поверхности с низким коэффициентом сцепления;
zRHmax - максимальное значение zRH;
zRLmax - максимальное значение zRL;
zRmax - максимальное значение zR.
____________
1) случае двухосных механических ТС обозначения FMnd и FMd могут быть упрощены до обозначений Fi c cответствующими значениями индекса i.
Дополнение 2
к приложению Н
Реализация силы сцепления
1 Метод измерения для механических транспортных средств
1.1 Определение коэффициента сцепления к
1.1.1 Коэффициент сцепления k для оси, тормоза которой активизированы, определяют как частное от деления максимальной тормозной силы (при отсутствии блокировки колес) на динамическую нагрузку, действующую на соответствующую ось, тормоза которой активизированы.
1.1.2 В процессе испытаний должны быть активизированы колеса только одной оси ТС при скорости начала торможения 50 км/ч. Силы торможения должны быть распределены по колесам оси так, чтобы достичь максимальной эффективности торможения. АБС должна быть отсоединена (или не должна быть активизирована в диапазоне скоростей от 40 до 20 км/ч).
1.1.3 Должно быть выполнено некоторое число испытаний при последовательно возрастающих значениях давления в магистрали, чтобы определить zmax (максимальную удельную тормозную силу ТС).
В процессе каждого испытания поддерживают постоянную силу воздействия на тормоза, а удельную тормозную силу определяют, исходя из отрезка времени t, требующегося для снижения скорости с 40 до 20 км/ч, по формуле
![]()
1.1.3.1 Блокировка колес допускается при скорости менее 20 км/ч.
1.1.3.2 Начиная с минимального значения t, обозначаемого как tmin, отбирают три значения t, расположенные между tmin и 1,05 tmin, и рассчитывают среднеарифметическое значение tm. Затем определяют
![]()
Если продемонстрировано, что, по практическим соображениям, три значения t, отвечающие вышеприведенным условиям, не могут быть получены, то допускается использовать значение tmin. Однако при этом необходимо выполнение требований 1.3 настоящего дополнения.
1.1.4 Силы торможения рассчитывают, исходя из значений измеренных удельной тормозной силы и коэффициента сопротивления качению незаторможенной оси (незаторможенных осей), который составляет 0,015 для ведущей оси и 0,010 для ведомой оси.
1.1.5 Динамическая нагрузка на ось должна соответствовать нагрузке, рассчитанной по формуле, приведенной в приложении К.
1.1.6 Значение k должно быть округлено до трех десятичных знаков.
1.1.7 Затем испытание необходимо повторить для другой оси (других осей) в соответствии с 1.1.1-1.1.6 настоящего дополнения (исключения обусловлены в 1.4 и 1.5 настоящего дополнения).
1.1.8 Например, в случае двухосного ТС с приводом на колеса задней оси (оси, определяемой индексом i = 2) при активизации тормозов колес передней оси (оси с i = 1) коэффициент сцепления kf рассчитывают по формуле
1.1.9 Должны быть определены коэффициенты сцепления для передней и задней осей (kf - для передней оси и kr - для задней оси).
1.2 Определение коэффициента реализации силы сцепления ε
1.2.1 Коэффициент реализации силы сцепления е определяют как частное от деления максимальной удельной тормозной силы при активизации АБС - zAL на коэффициент сцепления kм, а именно:
![]()
1.2.2 Максимальную удельную тормозную силу zAL определяют при начальной скорости торможения ТС 55 км/ч и полной цикличности работы АБС на основе среднего значения по трем испытаниям в соответствии с 1.1.3 настоящего дополнения с использованием времени, затраченного на снижение скорости с 45 до 15 км/ч, по формуле
![]()
1.2.3 Коэффициент сцепления kм определяют по результатам взвешивания и с учетом динамических нагрузок:
![]()
![]()
1.2.4 Полученное значение ε округляют до двух десятичных знаков.
1.2.5 Если ТС оборудовано АБС категории 1 или 2, значение zAL определяют для ТС в целом при активизированной АБС. Значение ε определяют по формуле, приведенной в 1.2.1 настоящего дополнения.
1.2.6 Если ТС оборудовано АБС категории 3, значение zAL определяют на каждой оси, имеющей по крайней мере одно колесо, непосредственно управляемое АБС. Например, в случае двухосного ТС с приводом на колеса задней оси, имеющего АБС, действующую только на заднюю ось (ось 2), коэффициент реализации силы сцепления рассчитывают по формуле
Такой расчет выполняют для каждой оси, имеющей по крайней мере одно колесо, непосредственно управляемое с помощью АБС.
1.3 Если расчетное значение ε > 1,00, измерения коэффициента сцепления необходимо повторить. Приемлемой является точность 10 %.
1.4 Для трехосного механического ТС с двухосной тележкой значение k, относящееся ко всему ТС, определяют на оси, не входящей в тележку 1).
____________
1) Пока не принята единая методика испытаний, методика испытания ТС с числом осей более трех и специальных ТС должна быть согласована с испытательной лабораторией.
1.5 Для ТС категорий N2 и N3 с колесной базой менее 3,8 м и отношением h/Е ≥ 0,25 определение коэффициента сцепления на задней оси не проводят.
1.5.1 Если коэффициент реализации силы сцепления определяют как частное от деления максимальной удельной тормозной силы при активизированной АБС - zAL на коэффициент сцепления kf причем его значение известно, то
![]()
2 Метод измерения для прицепов
2.1 Общие положения
2.1.1 Коэффициент сцепления k для оси, тормоза которой активизированы, определяют как частное от деления максимальной тормозной силы (при отсутствии блокировки колес) на динамическую нагрузку, действующую на соответствующую ось, тормоза которой активизированы.
2.1.2 В процессе испытания активизируют только одну ось прицепа при скорости начала торможения 50 км/ч. Силы торможения должны быть распределены между колесами оси таким образом, чтобы обеспечить максимальную эффективность торможения. АБС должна быть отключена или находиться в неактивизированном состоянии в диапазоне скоростей от 40 до 20 км/ч.
2.1.3 Необходимо выполнить определенное число испытаний с последовательным возрастанием давления в магистрали для определения максимальной удельной тормозной силы комбинации ТС (zCmax) при активизации только тормозов прицепа. В процессе каждого испытания поддерживают постоянную силу воздействия на тормоза, а удельную тормозную силу определяют на основе отрезка времени t, необходимого для снижения скорости с 40 до 20 км/ч, по формуле
![]()
2.1.3.1 Блокировка колес допускается при скоростях менее 20 км/ч.
2.1.3.2 Начиная с минимального значения t, обозначаемого как tmin, отбирают три значения t, расположенные между tmin и 1,05 tmin, и рассчитывают среднеарифметическое значение tm. Затем определяют
![]()
Если продемонстрировано, что, по практическим соображениям, три значения t, отвечающие вышеприведенным условиям, не могут быть получены, то допускается использовать значение tmin.
2.1.4 Коэффициент реализации силы сцепления ε рассчитывают по формуле
![]()
Значение коэффициента сцепления kR определяют: для полных прицепов - в соответствии с 2.2.3 настоящего дополнения, для полуприцепов - в соответствии с 2.3.1 настоящего дополнения.
2.1.5 Если расчетное значение ε > 1,00, измерения коэффициента сцепления необходимо повторить. Приемлемой является точность 10 %.
2.1.6 Максимальную удельную тормозную силу zRAL измеряют при полной цикличности работы АБС и отсутствии торможения буксирующего ТС на основе среднего значения по трем испытаниям в соответствии с 2.1.3 настоящего дополнения.
2.2 Полные прицепы (см. 2.1.2.1)
2.2.1 Для одной i-й передней оси:
FbR max i = zC max i (FM + Fr) - 0,01FCnd - 0,015FCd;
![]()
![]()
Для одной i-й задней оси:
FbR max i = zC max i (FM + Fr) - 0,01FCnd - 0,015FCd;
![]()
![]()
2.2.2 Значения kf и kr округляют до трех десятичных знаков.
2.2.3 Коэффициент сцепления kR рассчитывают пропорционально динамическим осевым нагрузкам:
![]()
2.2.4 Определение zRAL (при работающей АБС)
![]()
Удельную тормозную силу zRAL определяют на поверхности с высоким коэффициентом сцепления, а для ТС с АБС категории А - также на поверхности с низким коэффициентом сцепления.
2.3 Полуприцепы и прицепы с центральной осью (см. 2.1.2.2 и 2.1.2.3)
2.3.1 Определение коэффициента сцепления k (при отсоединенной или неработающей АБС и скорости движения в диапазоне от 40 до 20 км/ч) проводят для колес только одной оси. При этом колеса другой оси (других осей) должны быть сняты.
FbR max = zC max (FM + Fr) - FWM;
![]()
![]()
2.3.2 Определение zRAL (при работающей АБС) проводят, когда на ТС установлены все колеса.
FbRAL = zCAL(FM + FR) - FWM;
![]()
![]()
Удельную тормозную силу zRAL определяют на поверхности с высоким коэффициентом сцепления, а для ТС с АБС категории А - также на поверхности с низким коэффициентом сцепления.
Дополнение 3
к приложению Н
Эффективность торможения на поверхностях с различными коэффициентами сцепления
1 Механические транспортные средства
1.1 Предписанная в Н.5.3.5 удельная тормозная сила может быть рассчитана на основе коэффициентов сцепления, полученных в испытаниях, выполненных на двух поверхностях, удовлетворяющих условиям Н.5.3.4.
1.2 Коэффициенты сцепления поверхностей с высоким kн и низким kL коэффициентами сцепления должны быть определены в соответствии с условиями, установленными в 1.1 дополнения 2 к приложению Н.
1.3 Удельная тормозная сила для груженых механических транспортных средств zMALS должна удовлетворять условию:
![]()
2 Прицепы
2.1 Удельная тормозная сила, указанная в Н.6.3.2, может быть рассчитана на основе значений удельных тормозных сил zRALH и zRALL, полученных в испытаниях, выполненных на двух поверхностях при работающей АБС. Эти две поверхности должны удовлетворять условиям Н.6.3.2.
2.2 Удельная тормозная сила zRALS должна удовлетворять условию:
![]()
Если ![]() εH
> 0,95, следует принимать εH = 0,95.
εH
> 0,95, следует принимать εH = 0,95.
Дополнение 4
к приложению Н
Метод выбора поверхностей с низким коэффициентом сцепления
1 Подробные сведения, касающиеся коэффициентов сцепления поверхностей, выбранных в соответствии с Н.5.1.1.2, должны быть переданы в испытательную лабораторию.
1.1 Эти сведения должны включать в себя график зависимости коэффициента сцепления от степени проскальзывания шины в контакте с опорной поверхностью (от 0 % до 100 %) при средней скорости 40 км/ч 1).
____________
1) Пока не принята единая процедура определения зависимости коэффициента сцепления от проскальзывания для ТС максимальной массой свыше 3,5 т, допускается использование аналогичной зависимости для легковых автомобилей. Для таких ТС отношение kpeak к klock должно быть установлено с использованием значения kpeak в соответствии с дополнением 2 к приложению Н. По согласованию с испытательной лабораторией коэффициент сцепления, рассматриваемый в настоящем разделе, может быть определен другим методом, если будет продемонстрирована эквивалентность полученных значений отношений kpeak к klock.
1.1.1 Максимум на кривой, отображающей зависимость коэффициента сцепления от степени проскальзывания, дает значение kpeak, а значение коэффициента сцепления при проскальзывании 100 % определяет klock.
1.1.2 Коэффициент R определяют как отношение kpeak к klock:
![]()
1.1.3 Полученное значение R округляют до одного десятичного знака.
1.1.4 Поверхность, пригодная для использования, должна иметь коэффициент R в диапазоне от 1,0 до 2,0 2)
____________
2) До тех пор, пока такие испытательные поверхности не станут общедоступными, считают приемлемым значение R вплоть до 2,5. Конкретное значение R - предмет обсуждения с испытательной лабораторией.
2 До начала испытаний испытательная лаборатория должна убедиться, что выбранная поверхность соответствует установленным требованиям, и получить информацию по следующим вопросам:
а) метод испытаний по определению R;
б) тип ТС (механическое ТС, прицеп и т.п.);
в) осевые нагрузки и шины (должны быть испытаны различные шины при различных осевых нагрузках, результаты представлены в испытательную лабораторию, которая примет решение о пригодности этих результатов для проведения дальнейших испытаний ТС и получения достоверных выводов).
2.1 Значение R должно быть приведено в отчете об испытаниях.
Калибровку поверхности, предназначенной для проведения испытаний, следует проводить не менее одного раза в год с использованием репрезентативного ТС в целях подтверждения стабильности R.
Приложение П
(обязательное)
Условия проведения испытаний для прицепов с электрическими тормозными системами
П.1 Основные положения
П.1.1 В настоящем приложении под «электрической тормозной системой» подразумевается рабочая тормозная система, состоящая из управляющего устройства, электромеханического тормозного привода и фрикционных тормозов. Электрическое управляющее устройство, регулирующее электрическое напряжение в тормозной системе прицепа, должно быть расположено на прицепе.
П.1.2 Электрическая энергия, необходимая для работы электрической тормозной системы прицепа, поступает от буксирующего ТС.
П.1.3 Электрическая тормозная система должна активизироваться приведением в действие рабочей тормозной системы буксирующего ТС.
П.1.4 Номинальное напряжение должно быть 12 В.
П.1.5 Максимальная сила тока при работе электрической тормозной системы не должна превышать 15 А.
П.1.6 Электрическое соединение электрической тормозной системы с буксирующим ТС должно быть выполнено с помощью специального штепсельного разъема 1), штекер которого несовместим с розетками осветительного оборудования ТС. Штекер с кабелем должны быть расположены на прицепе.
_____________
1) Пока не определены параметры такого специального разъема, тип разъема должен быть определен авторитетным национальным органом.
П.2 Требования к прицепу
П.2.1 Если на прицепе размещена аккумуляторная батарея, заряжаемая от источника электроэнергии, расположенного на буксирующем ТС, она должна быть отсоединена от этого источника при активизации рабочей тормозной системы прицепа.
П.2.2 Если масса порожнего прицепа составляет менее 75 % его максимальной массы, то сила торможения должна автоматически регулироваться в зависимости от реальной загрузки прицепа.
П.2.3 Электрические тормозные системы должны быть такими, чтобы при падении напряжения в электрической цепи до 7 В сохранялась сила торможения, составляющая не менее 20 % максимальной статической нагрузки на ось одноосного прицепа или 20 % суммы максимальных статических нагрузок на оси многоосного прицепа.
П.2.4 Управляющее устройство, регулирующее силу торможения, реагирующее на продольный крен прицепа (устройство маятникового типа, типа «масса-пружина» или основанное на инерции жидкости), должно, если прицеп имеет более одной оси и регулируемое по высоте сцепное устройство, быть закреплено на шасси. В случае одноосного прицепа и прицепа со сближенными осями и межосевым расстоянием менее 1 м такое управляющее устройство должно быть оборудовано приспособлением, показывающим его положение относительно горизонтальной плоскости (например, пузырьковым уровнемером), и иметь ручную регулировку, позволяющую устанавливать это приспособление в горизонтальной плоскости в соответствии с направлением движения ТС.
П.2.5 Реле, активизирующее ток торможения при условиях 5.2.1.19.2 и подсоединенное к цепи активизации, должно быть расположено на прицепе.
П.2.6 Штекер должен быть снабжен розеткой-заглушкой.
П.2.7 Управляющее устройство должно быть снабжено световым индикатором, включающимся при каждой активизации тормозов и информирующим о нормальном функционировании тормозной системы прицепа.
П.3 Требования к эффективности торможения
П.3.1 Электрические тормозные системы должны реагировать на управляющие воздействия при замедлении комбинации тягач-прицеп, не превышающем 0,4 м/с2.
П.3.2 Торможение может начинаться при первоначальной силе торможения, которая не должна превышать 10 % максимальной статической нагрузки на ось одноосного прицепа (10 % суммы максимальных статических нагрузок на оси многоосного прицепа) или 13 % статической нагрузки на ось порожнего прицепа (13 % суммы статических нагрузок на оси порожнего многоосного прицепа).
П.3.3 Силы торможения при этом могут возрастать ступенчато. При значениях сил торможения более высоких ступеней, чем указанные в П.3.2, ступени нарастания сил торможения не должны превышать 6 % максимальной статической нагрузки на ось одноосного прицепа (6 % суммы максимальных статических нагрузок на оси многоосного прицепа) или 8 % статической нагрузки на ось порожнего прицепа (8 % суммы статических нагрузок на оси порожнего многоосного прицепа). Однако для одноосных прицепов максимальной массой не более 1,5 т первая ступень не должна превышать 7 % максимальной осевой нагрузки прицепа. Допускается последовательное увеличение этого показателя на 1 % (например, 7 % для первой ступени, 8 % для второй ступени, 9 % для третей ступени и т.д.). При этом ни одна из последующих ступеней не должна превышать 10 % максимальной осевой нагрузки прицепа. Эти требования также распространяются на двухосные прицепы с колесной базой менее 1 м, которые в данном случае рассматривают как одноосные прицепы.
П.3.4 Предписанная сила торможения прицепа, составляющая не менее 50 % максимальной нагрузки на ось, должна быть достигнута при максимальной массе, когда среднее значение полностью реализованного замедления комбинации тягач-прицеп не превышает 5,9 м/с2 для одноосного прицепа и 5,6 м/с2 для многоосного прицепа. Прицепы, имеющие сближенные оси с межосевым расстоянием менее 1 м, в отношении выполнения этих требований считают одноосными прицепами. Кроме того, должны быть приняты во внимание пределы, установленные в дополнении к приложению П. При ступенчатом регулировании силы торможения эти пределы должны находиться внутри диапазона, показанного в настоящем дополнении.
П.3.5 Испытание должно быть выполнено при начальной скорости 60 км/ч.
П.3.6 Автоматическое торможение прицепа должно осуществляться в соответствии с требованиями 5.2.2.9. Если такое автоматическое торможение требует затраты электроэнергии, сила торможения прицепа, составляющая не менее 25 % максимальной суммарной осевой нагрузки, должна поддерживаться в течение не менее 15 мин для того, чтобы удовлетворить установленные выше требования.
Дополнение
к приложению П
Совместимость последовательностей значений удельной тормозной силы прицепа и среднего значения полностью реализованного замедления комбинации тягач-прицеп (в случаях груженого и порожнего прицепов)
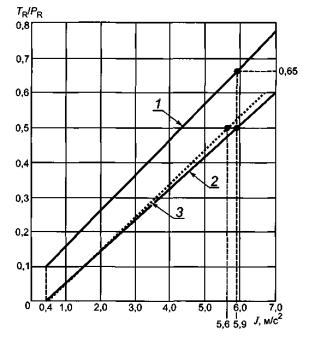
1 - одноосные и многоосные прицепы; 2 - многоосные прицепы; 3 - одноосные прицепы
Рисунок П.1 - Зависимости предельных значений удельной тормозной силы прицепа от замедления комбинации тягач-прицеп для прицепов различных типов
Примечания
1 Пределы, показанные на рисунке П.1, относятся к груженым и порожним прицепам. Если масса порожнего прицепа превышает 75 % его максимальной массы, эти пределы должны быть применены только к груженому прицепу.
2 Пределы, показанные на рисунке П.1, не влияют на требования приложения П, относящиеся к минимальной эффективности торможения. Однако если эффективность торможения, обеспечиваемая в процессе испытания в соответствии с П.3.4, выше, чем требуемая, эта эффективность торможения не должна превышать пределы, показанные на рисунке П.1.
Условные обозначения:
TR - сумма сил торможения на периферии всех колес прицепа;
PR - суммарная вертикальная статическая реакция на колесах прицепа со стороны опорной поверхности;
J - среднее полностью реализованное замедление комбинации тягач-прицеп.
Приложение Р
(обязательное)
Метод испытания тормозных накладок на инерционном динамометрическом стенде
Р.1 Основные положения
Р.1.1 Процедура испытаний, описываемая в настоящем приложении, может быть применена при модификации типа ТС, ранее успешно прошедшего испытания на соответствие настоящему стандарту, заключающейся в комплектации ТС тормозными накладками другого типа.
Р.1.2 Тормозные накладки альтернативных типов должны быть проверены путем сравнения их эффективности с эффективностью тех накладок, которыми было оборудовано ТС ранее и на которых в испытательной лаборатории были получены положительные результаты. Эти результаты должны быть представлены в соответствующем информационном документе, образец которого приведен в приложении Б.
Р.1.3 Испытательная лаборатория, проводящая испытания, может по своему усмотрению потребовать сравнить эффективность тормозных накладок с эффективностью, полученной в соответствии с предписаниями, содержащимися в приложении В.
Р.1.4 Заявка на оценку эффективности накладок методом сравнения может быть подана изготовителем ТС или его полномочным представителем.
Р.1.5 В настоящем приложении под «транспортным средством» (ТС) подразумевают тип ТС, который удовлетворяет требованиям настоящего стандарта и для которого проводят сравнительные испытания накладок.
Р.2 Испытательное оборудование
Р.2.1 Стенд, предназначенный для проведения испытаний, должен иметь следующие особенности:
Р.2.1.1 Должно быть обеспечено воссоздание инерционных характеристик, предписанных в Р.3.1 и способных удовлетворять требованиям В.1.5, В.1.6 и В.1.7 (приложение В), относящимся к испытаниям «Тип-I», «Тип-II» и «Тип-III».
Р.2.1.2 Применяемые тормоза должны быть идентичны тормозам, характеризующим тип ТС.
Р.2.1.3 Воздушное охлаждение (если предусмотрено) должно удовлетворять требованиям Р.3.4.
Р.2.1.4 Инструментальное оборудование для испытаний должно обеспечивать получение, по меньшей мере, следующих данных:
Р.2.1.4.1 непрерывно записываемой частоты вращения тормозного диска или барабана;
Р.2.1.4.2 числа оборотов диска или барабана, выполненных в процессе торможения, с точностью не менее 1/8 оборота;
Р.2.1.4.3 длительности торможения;
Р.2.1.4.4 непрерывно записываемой температуры, измеряемой в середине поверхности трения, образуемой тормозной накладкой, или в теле тормозной накладки, барабана или диска на равном расстоянии от внутренней и наружной поверхностей;
Р.2.1.4.5 непрерывно записываемого давления или усилия в тормозном приводе при активизации тормоза;
Р.2.1.4.6 непрерывно записываемого тормозного момента на выходе из тормоза.
Р.3 Условия проведения испытаний
Р.3.1 Динамометр должен быть настроен как можно точнее (допуск - 5 %) на момент инерции, эквивалентный суммарной инерции той части массы ТС, которая затормаживается соответствующим колесом (соответствующими колесами). При этом используют следующую формулу:
I = MR2,
где I - момент инерции, кг·м2;
R - динамический радиус качения шины, м;
М - часть максимальной массы ТС, затормаживаемая соответствующим колесом (соответствующими колесами). В случае динамометра с односторонним выходом вала эту часть массы рассчитывают для ТС категорий М и N исходя из конструктивного распределения тормозных сил при значениях замедления, соответствующих В.2.4 (приложение В). Для ТС категории О (прицепов) эта часть массы должна соответствовать нагрузке на опорную поверхность соответствующего колеса при неподвижном ТС, нагруженном до состояния максимальной массы.
Р.3.2 Начальная частота вращения инерционного динамометра должна соответствовать скорости ТС, предписанной в приложении В, и исходить из динамического радиуса качения шины.
Р.3.3 Площадь контакта при торможении должна составлять не менее 80 % рабочей поверхности накладки. Температура в процессе приработки накладок не должна превышать 180 °С. Альтернативно, по требованию изготовителя ТС, приработка накладок может быть проведена в соответствии с его рекомендациями.
Р.3.4 Допускается использование воздушного охлаждения, при этом поток воздуха должен быть направлен на тормоз перпендикулярно к его оси вращения. Скорость потока воздуха, обдувающего тормоз vair, должна быть:
vair = 0,33v,
где v - скорость ТС в начале торможения.
Температура охлаждающего воздуха должна быть равна наружной температуре.
Р.4 Процедура испытаний
Р.4.1 На сравнительные испытания должны быть представлены пять образцов тормозных накладок. Их необходимо сравнить с пятью образцами накладок, соответствующих комплектующим изделиям, с которыми ТС ранее выдержало испытания в соответствии с настоящим стандартом.
Р.4.2 Вывод об эквивалентности тормозных накладок должен быть основан на результатах, полученных в испытаниях, процедура которых описана в настоящем приложении, и при выполнении требований, указанных ниже.
Р.4.3 Испытание эффективности торможения «Тип-0»
Р.4.3.1 Тормоз активизируют три раза при начальной температуре, не превышающей 100 °С. Температуру измеряют в соответствии с Р.2.1.4.4.
Р.4.3.2 Если тормозные накладки предназначены для использования на ТС категорий М и N, активизация тормоза должна быть проведена при начальной частоте вращения, эквивалентной скорости ТС, указанной в В.2.1 (приложение В), и эта активизация должна обеспечить среднее значение тормозного момента, эквивалентного замедлению, указанному в В.2.1. Кроме того, необходимо провести испытания на различных частотах вращения, наименьшая из которых должна соответствовать 30 % максимальной скорости ТС, а наибольшая - 80 % этой скорости.
Р.4.3.3 Если тормозные накладки предназначены для использования на ТС категории О, активизация тормоза должна быть проведена при начальной частоте вращения, эквивалентной скорости ТС 60 км/ч, и эта активизация должна обеспечить среднее значение тормозного момента, эквивалентного замедлению, указанному в В.3.1 (приложение В). Дополнительно необходимо провести испытание эффективности торможения при холодном тормозе и начальной частоте вращения, соответствующей скорости ТС 40 км/ч, для сравнения с результатами испытания «Тип-I», предписанными в В.3.1.2.2.
Р.4.3.4 Среднее значение тормозного момента, полученное в указанных выше сравнительных испытаниях эффективности торможения при холодном тормозе, должно для тех же измеренных входных воздействий быть в пределах, полученных на тормозных накладках, соответствующих компонентам ТС, с которыми ТС ранее успешно выдержало испытания в испытательной лаборатории, с точностью ± 15 %.
Р.4.4 Испытание «Тип-I» (испытание уменьшения эффективности торможения)
Р.4.4.1 При повторяющемся торможении:
Р.4.4.1.1 тормозные накладки для ТС категорий М и N должны быть испытаны в соответствии с процедурой, описанной в В.1.5.1 (приложение В).
Р.4.4.2 При непрерывном торможении:
Р.4.4.2.1 тормозные накладки для прицепов (ТС категории О) должны быть испытаны в соответствии с В.1.5.2 (приложение В).
Р.4.4.3 Эффективность торможения при «горячих» тормозах
Р.4.4.3.1 После окончания испытаний в соответствии с Р.4.4.1 и Р.4.4.2 должны быть проведены испытания эффективности торможения при «горячих» тормозах в соответствии с В.1.5.3 (приложение В).
Р.4.4.3.2 Среднее значение тормозного момента, полученное в упомянутых выше сравнительных испытаниях эффективности торможения при «горячих» тормозных накладках, должно для тех же измеренных входных воздействий быть в пределах, полученных при тормозных накладках, соответствующих компонентам ТС, с которыми ТС ранее успешно выдержало испытания в испытательной лаборатории, с точностью ± 15 %.
Р.4.5 Испытание «Тип-II» (торможение на спуске)
Р.4.5.1 Данное испытание проводят только в том случае, когда при испытания «Тип-Н» на соответствие ТС настоящему стандарту используют фрикционные тормоза.
Р.4.5.2 Тормозные накладки для механических ТС категорий М3 [за исключением ТС, которые должны быть подвергнуты испытанию «Тип-IIА» в соответствии с В.1.6.4 (приложение В)], N3 и O4 должны быть испытаны в соответствии с В.1.6.1.
Р.4.5.3 Эффективность торможения при «горячих» тормозах
Р.4.5.3.1 После окончания испытаний в соответствии с Р.4.5.1 и Р.4.4.2 должны быть проведены испытания эффективности торможения при «горячих» тормозах в соответствии с В.1.6.3 (приложение В).
Р.4.5.3.2 Среднее значение тормозного момента, полученное в упомянутых выше сравнительных испытаниях эффективности торможения при «горячих» тормозных накладках, должно для тех же измеренных входных воздействий быть в пределах, полученных на тормозных накладках, соответствующих компонентам ТС, с которыми ТС ранее успешно выдержало испытания в испытательной лаборатории, с точностью ± 15 %.
Р.4.6 Испытание «Тип-III» (испытание уменьшения эффективности торможения)
Р.4.6.1 Испытание с повторяющимся торможением
Р.4.6.1.1 Тормозные накладки прицепов категории O4 должны быть испытаны в соответствии с процедурой, описанной в В.1.7.1 и В.1.7.2 (приложение В).
Р.4.6.2 Испытание при непрерывном торможении
Р.4.6.2.1 Тормозные накладки для прицепов категории 04 должны быть испытаны в соответствии с В.1.7 (приложение В).
Р.4.6.3 Эффективность торможения при «горячих» тормозах
Р.4.6.3.1 После окончания испытаний в соответствии с Р.4.6.1 и Р.4.6.2 должны быть проведены испытания эффективности торможения при «горячих» тормозах в соответствии с В.1.7.2 (приложение В).
Р.4.6.3.2 Среднее значение тормозного момента, полученное в упомянутых выше сравнительных испытаниях эффективности торможения при «горячих» тормозных накладках, должно для тех же измеренных входных воздействий быть в пределах, полученных на тормозных накладках, соответствующих компонентам ТС, с которыми ТС ранее успешно выдержало испытания в испытательной лаборатории, с точностью ± 15 %.
Р.5 Осмотр тормозных накладок
Р.5.1 После окончания испытаний, описанных выше, состояние тормозных накладок должно быть проверено визуально с точки зрения возможности дальнейшего использования при нормальной эксплуатации.
Приложение С
(зарезервировано)
Приложение Т
(обязательное)
Испытания по оценке функциональной совместимости транспортных средств, оборудованных электрическими управляющими магистралями
Т.1 Общие положения
Т.1.1 Настоящее приложение устанавливает процедуру, которая может быть применена для проверки буксирующего и буксируемого ТС, оборудованных электрической управляющей магистралью, на соответствие требованиям к функционированию и эффективности, установленным в 5.1.3.6.1. По усмотрению испытательной лаборатории допускается использование альтернативных процедур, если может быть установлен эквивалентный уровень их достоверности.
Т.2 Информационный документ
Т.2.1 Поставщик ТС или системы этого ТС должен представить испытательной лаборатории информационный документ, содержащий, как минимум, следующие сведения:
Т.2.1.1 схему тормозной системы ТС;
Т.2.1.2 подтверждение того, что интерфейс, включающий в себя физический уровень, уровень канала передачи данных и прикладной уровень, а также соответствующую позицию поддерживающих сообщений и параметров, соответствует [1] и [2];
Т.2.1.3 перечень поддерживающих сообщений и параметров и
Т.2.1.4 технические требования к буксирующему ТС в отношении количества управляющих цепей, подающих сигналы в пневматическую и/или электрическую управляющие магистрали.
Т.3 Буксирующие ТС
Т.3.1 Имитатор прицепа, соответствующий [1] и [2]
Имитатор прицепа должен:
Т.3.1.1 иметь 7-штырьковый соединитель, соответствующий [3] или [4], для подсоединения к ТС при проведении испытания. Штыри № 6 и № 7 соединителя должны быть использованы для передачи и получения сообщений в соответствии с [1] и [2];
Т.3.1.2 обеспечивать получение всех сообщений, поступающих от буксирующего ТС, имеющего одобрение типа, и передачу на буксирующее ТС всех сообщений, обусловленных в [2];
Т.3.1.3 осуществлять прямое или косвенное считывание сообщений с параметрами, находящимися в поле данных, размещенных в соответствии с временем их поступления, и
Т.3.1.4 включать в себя устройство для измерения времени реакции на соединительной головке в соответствии с Д.2.6 (приложение Д).
Т.3.2 Процедура оценки
Т.3.2.1 Необходимо убедиться, что в информационном документе изготовителя/поставщика подтверждено соответствие требованиям [1] и [2], относящимся к физическому уровню, уровню канала передачи данных и прикладному уровню.
Т.3.2.2 При имитаторе прицепа, подсоединенном к буксирующему ТС через интерфейс, соответствующий [3] или [4], и в процессе передачи через этот интерфейс всех соответствующих сообщений от прицепа необходимо проверить следующее:
Т.3.2.2.1 передачу сигналов по управляющей магистрали, при этом
Т.3.2.2.1.1 параметры, определяемые в EBS 12, байт 3 (см. [2]), должны быть проверены с учетом технических требований к ТС в соответствии с таблицей:
|
Сигналы, передаваемые по управляющей магистрали |
Установки EBS 12, байт 3 |
|
|
Разряды (биты) 1-2 |
Разряды (биты) 5-6 |
|
|
Запрос на применение рабочего торможения, генерируемый в одной электрической цепи |
00b |
- |
|
Запрос на применение рабочего торможения, генерируемый в двух электрических цепях |
01b |
- |
|
ТС не оборудовано пневматической управляющей магистралью 1) |
- |
00b |
|
ТС оборудовано пневматической управляющей магистралью |
- |
01b |
|
1) Отсутствие такой магистрали в соответствии со сноской 1 к 5.1.3.1.3 не допускается. |
||
Т.3.2.2.2 запрос на применение рабочего/запасного тормоза,
Т.3.2.2.2.1 при этом параметры, устанавливаемые в EBS 11 (см. [2]), должны быть проверены в соответствии с таблицей:
|
Условия проведения испытаний |
Разряды (биты) |
Значение сигнала, передаваемого по электрической управляющей магистрали |
|
Педаль рабочего тормоза и орган управления запасным тормозом отпущены |
3-4 |
0 |
|
Педаль рабочего тормоза полностью активизирована |
3-4 |
От 33280d до 43520d (от 6,5 бар до 8,5 бар) |
|
Орган управления запасным тормозом полностью активизирован 1) |
3-4 |
От 33280d до 43520d (от 6,5 бар до 8,5 бар) |
|
1) Факультативное требование к буксирующему ТС, оборудованному электрической и пневматической управляющими магистралями, если пневматическая управляющая магистраль отвечает соответствующим требованиям к запасному торможению. |
||
Т.3.2.2.3 предупреждение о неисправностях, при этом необходимо создать соответствующую имитацию:
Т.3.2.2.3.1 постоянной неисправности в линии передачи данных к штырю № 6 интерфейса, соответствующего [3] или [4], и убедиться в том, что включился желтый предупреждающий сигнал, соответствующий 5.2.1.29.1.2;
Т.3.2.2.3.2 постоянной неисправности в линии передачи данных к штырю № 7 интерфейса, соответствующего [3] или [4], и убедиться в том, что включился желтый предупреждающий сигнал, соответствующий 5.2.1.29.1.2;
Т.3.2.2.3.3 сообщения EBS 22, байт 2 с разрядами (битами) 3-4 и установкой на 01b и убедиться в том, что включился красный предупреждающий сигнал, соответствующий 5.2.1.29.1.1;
Т.3.2.2.4 запрос на торможение по питающей магистрали,
при этом для механических ТС, которые возможно эксплуатировать с прицепами, подсоединенными только через электрическую управляющую магистраль, необходимо:
подсоединить только электрическую управляющую магистраль, после чего необходимо провести имитацию:
сообщения EBS 22, байт 4 с разрядами (битами) 3-4 и установкой на 01b и убедиться в том, что когда рабочий тормоз, запасной тормоз или стояночный тормоз полностью активизированы, давление в питающей магистрали снижается до 1,5 бар в последующие 2 с;
постоянного отсутствия передачи данных и убедиться в том, что когда рабочий тормоз, запасной тормоз или стояночный тормоз полностью активизированы, давление в питающей магистрали снижается до 1,5 бар в последующие 2 с;
Т.3.2.2.5 время реакции:
Т.3.2.2.5.1 при этом необходимо убедиться, что при отсутствии отказов выполняются требования к времени реакции управляющей магистрали, предписанные Д.2.6 (приложение Д).
Т.3.2.3 Дополнительные проверки
Т.3.2.3.1 По усмотрению испытательной лаборатории процедуры проверки, описанные выше, могут быть повторены в различных режимах с функциями, соответствующими данному интерфейсу, не включающими в себя торможение, или при их отключении.
Т.4 Прицепы
Т.4.1 Имитатор буксирующего ТС, соответствующий [1] и [2]
Имитатор должен:
Т.4.1.1 иметь 7-штырьковый соединитель, соответствующий [3] или [4], для подсоединения к ТС при испытаниях. Штыри № 6 и № 7соединителя должны быть использованы для передачи и получения сообщений в соответствии с[1] и [2];
Т.4.1.2 иметь дисплей, предупреждающий о неисправности, и осуществлять электропитание прицепа;
Т.4.1.3 обеспечивать прием всех сообщений, передаваемых от сертифицированного (эталонного) прицепа, и передачу на прицеп всех сообщений, предусмотренных для механического ТС в соответствии с [2];
Т.4.1.4 осуществлять прямое или косвенное считывание сообщений, содержащих параметры в области данных, показанные в последовательности, соответствующей реальному времени, и
Т.4.1.5 включать в себя устройство для измерения времени реакции тормозной системы в соответствии с Д.3.5.2 (приложение Д).
Т.4.2 Процедура проверки
Т.4.2.1 Необходимо убедиться, что в информационном документе изготовителя/поставщика подтверждено соответствие требованиям [1] и [2], относящимся к физическому уровню, уровню канала передачи данных и прикладному уровню.
Т.4.2.2 При имитаторе буксирующего ТС, подсоединенном к прицепу через интерфейс, соответствующий [3] или [4], и в процессе передачи через этот интерфейс соответствующих сообщений от буксирующего ТС необходимо проверить следующее:
Т.4.2.2.1 функционирование рабочей тормозной системы:
Т.4.2.2.1.1 реакцию прицепа на параметры, определенные в EBS 11 (см. [2]),
при этом давление в питающей магистрали в начале каждого испытания должно быть не менее 7 бар, и ТС должно быть в груженом состоянии (для целей настоящей проверки допускается имитация условий нагрузки);
Т.4.2.2.1.1.1 для прицепов, оборудованных пневматической и электрической управляющими магистралями:
- обе управляющие магистрали должны быть подсоединены;
- обе управляющие магистрали должны передавать сообщения одновременно;
- имитатор должен передавать сообщение EBS 12, байт 3 с разрядами (битами) 5-6 и установкой на 01b, информирующее прицеп о том, что необходимо подсоединить пневматическую управляющую магистраль.
Параметры, подлежащие проверке, приведены в таблице:
|
Сообщение, передаваемое имитатором |
Давление в тормозных камерах |
|
|
Байты |
Цифровое значение сообщения |
|
|
3-4 |
0 |
0 бар |
|
3-4 |
33280d (6,5 бар) |
В соответствии с расчетом параметров тормозов, выполненным изготовителем ТС |
Т.4.2.2.1.1.2 для прицепов, оборудованных пневматической и электрической управляющими магистралями или только электрической управляющей магистралью, должна быть проверена только электрическая управляющая магистраль.
Имитатор должен передавать следующие сообщения:
EBS 12, байт 3 с разрядами (битами) 5-6 и установкой на 00b, информирующее прицеп о том, что пневматическая управляющая магистраль недоступна; и
EBS 12, байт 3 с разрядами (битами) 1-2 и установкой на 01b, информирующее прицеп о том, что электрический управляющий сигнал генерируется по двум независимым цепям.
Параметры, подлежащие проверке, приведены в таблице:
|
Сообщение, передаваемое имитатором |
Давление в тормозных камерах |
|
|
Байты |
Цифровое значение сообщения |
|
|
3-4 |
0 |
0 бар |
|
3-4 |
33280d (6,5 бар) |
В соответствии с расчетом параметров тормозов, выполненным изготовителем ТС |
Т.4.2.2.1.2 для прицепов, оборудованных только электрической управляющей магистралью, реакцию прицепа на сообщения, определенные в EBS 12 (см. [2]), которая должна быть проверена следующим образом:
- давление в пневматической питающей магистрали в начале каждого испытания должно быть не менее 7 бар;
- электрическая управляющая магистраль должна быть подсоединена к имитатору;
- имитатор должен передавать следующие сообщения:
EBS 12, байт 3, разряды (биты) 5-6 с установкой на 01b, информирующее прицеп о том, что пневматическая управляющая магистраль доступна;
EBS 11, разряды (биты) 3-4 с установкой на 0, информирующее прицеп об отсутствии запроса на рабочее торможение.
Необходимо проверить реакцию на сообщения в соответствии со следующей таблицей:
|
Сообщение на EBS 12, байт 3, разряды (биты) 1-2 |
Расшифровка сообщения |
|
01b |
Давление в тормозной камере - 0 бар (рабочий тормоз отпущен) |
|
00b |
Прицеп автоматически заторможен, что демонстрирует несовместимость звеньев комбинации ТС. Сигнал также должен быть передан через штырь № 5 соединителя, соответствующего [3] или [4], при этом должен включиться желтый предупреждающий сигнал |
Т.4.2.2.1.3 для прицепов, подсоединенных с помощью только электрической управляющей магистрали, - реакцию прицепа на неисправность в цепи электрического тормозного привода прицепа, вызывающую снижение эффективности торможения, как минимум, до 30 % предписанного значения, которая должна быть проверена с помощью следующей процедуры:
- давление в пневматической питающей магистрали в начале каждого испытания должно быть не менее 7 бар;
- электрическая управляющая магистраль должна быть подсоединена к имитатору;
- имитатор должен передавать следующие сообщения:
EBS 12, байт 3, разряды (биты) 5-6 с установкой на 00b, информирующее прицеп о том, что пневматическая управляющая магистраль недоступна;
EBS 12, байт 3 с разрядами (битами) 1-2 и установкой на 01b, информирующее прицеп о том, что электрический управляющий сигнал генерируется по двум независимым цепям.
При проверке необходимо выполнять указания в соответствии со следующей таблицей:
|
Условия проведения испытания |
Проверка реакции тормозной системы |
|
Отсутствие неисправностей в тормозной системе прицепа |
Убедиться, что тормозная система имеет информационную связь с имитатором и что EBS 22, байт 4, разряды (биты) 3-4 установлены на 00b |
|
В электрический тормозной привод тормозной системы прицепа внесена неисправность, которая снижает эффективность торможения, как минимум, до 30 % предписанного значения |
Убедиться, что EBS 22, байт 4, разряды (биты) 3-4 установлены на 01b или что передача данных на имитатор прекратилась |
Т.4.2.2.2 функционирование предупреждения о неисправности:
Т.4.2.2.2.1 проверить, что соответствующее предупреждающее сообщение или сигнал передан(но) при выполнении следующих условий:
Т.4.2.2.2.1.1 если постоянная неисправность в электрическом тормозном приводе тормозной системы прицепа вызывает невыполнение требований, предъявляемых к эффективности рабочей тормозной системы, имитировать такую неисправность и убедиться, что сообщение EBS 22, байт 2, разряды (биты) 3-4, переданное прицепом, установлено на 01Ь. Одновременно через штырь № 5 соединителя, соответствующего [3] или [4], должна пройти команда на включение желтого предупреждающего сигнала;
Т.4.2.2.2.1.2 уменьшить напряжение на штырях № 1 и № 2 соединителя, соответствующего [3] или [4], до уровня более низкого, чем установленный изготовителем для поддержания эффективности рабочего торможения, и убедиться, что сообщение EBS 22, байт 2, разряды (биты) 3-4, переданное прицепом, установлено на 01b. Одновременно через штырь № 5 соединителя, соответствующего [3] или [4], должен пройти сигнал на включение желтого предупреждающего сигнала;
Т.4.2.2.2.1.3 проверить соответствие требованиям 5.2.2.16, отсоединив питающую магистраль. Уменьшить давление в устройстве, сохраняющем давление в тормозной системе прицепа, до предписанного изготовителем. Убедиться, что сообщение EBS 22, байт 2, разряды (биты) 3-4, переданное прицепом, установлено на 01b, a сообщение EBS 23, байт 1, разряды (биты) 7-8 установлено на 00b. Одновременно через штырь № 5 соединителя, соответствующего [3] или [4], должна пройти команда на включение желтого предупреждающего сигнала;
Т.4.2.2.2.1.4 в процессе начальной подачи энергии в электрическую часть тормозной системы убедиться, что сообщение EBS 22, байт 2, разряды (биты) 3-4, переданное прицепом, установлено на 01b. После того, как завершена проверка тормозной системы на отсутствие неисправностей, требующих идентификации посредством включения красного предупреждающего сигнала, вышеупомянутое сообщение должно быть установлено на 00b.
Т.4.2.2.3 Проверка времени реакции
Т.4.2.2.3.1 Убедиться, что при отсутствии неисправностей предписанные в Д.3.5.2 (приложение Д) требования к времени реакции тормозной системы выполняются.
Т.4.2.3 Дополнительные проверки
Т.4.2.3.1 По усмотрению испытательной лаборатории процедуры проверки, установленные выше, могут быть повторены при сообщениях, соответствующих данному интерфейсу, не связанных с торможением, или при их исключении.
При повторных измерениях времени реакции тормозной системы возможны различия в полученных значениях из-за отклонений времени реакции пневматики ТС. Во всех случаях предписанные требования к времени реакции должны быть выполнены.
Приложение У
(обязательное)
Специальные требования, относящиеся к безопасности комплексных электронных систем управления транспортных средств
У.1 Общие положения
Настоящее приложение устанавливает специальные требования к документации, стратегии обнаружения и устранения неисправностей, касающиеся безопасности комплексных электронных систем управления ТС (см. У.2.3), имеющие отношение к настоящему стандарту.
На настоящее приложение также имеются ссылки в отдельных пунктах настоящего стандарта, относящихся к функциям безопасности, управляемым электронной системой (электронными системами).
Настоящее приложение не устанавливает критерии эффективности функционирования электронной системы управления (далее - система), но описывает методологию, применимую к процессу конструирования, и информацию, которая должна быть представлена испытательной лаборатории для проведения испытаний.
Эта информация должна продемонстрировать, что система удовлетворяет при нормальных условиях и при возникновении неисправностей (отказов) всем соответствующим требованиям к эффективности, установленным настоящим стандартом.
У.2 Термины и определения
Для целей настоящего приложения применены следующие термины с соответствующими определениями:
У.2.1 концепция безопасности (safety concept): Описание особенностей конструкции электронной системы управления, например электронных блоков, обеспечивающих целостность системы и, тем самым, безопасную эксплуатацию даже в случае неисправности в электропитании.
Возможность резервирования частичной функциональности или даже дублирования системы в отношении выполнения ее жизненно важных функций должна входить составной частью в концепцию безопасности.
У.2.2 электронная система управления (electronic control system): Комбинация блоков, сконструированная для обеспечения взаимодействия при формировании установленной функции управления транспортного средства на основе электронной обработки данных.
Такие системы часто управляются программным обеспечением на базе дискретных функциональных компонентов: датчиков, электронных управляющих блоков, исполнительных механизмов, связанных с промежуточными звеньями. Они могут включать в себя механические, электропневматические или электрогидравлические элементы.
Термин «система» в применении к настоящему пункту означает один из объектов, для которых запрашивают одобрение типа.
У.2.3 комплексные электронные системы управления транспортных средств (complex electronic vehicle control systems): Электронные системы управления, входящие в иерархическую структуру управления, в которой управляемая функция может перейти под контроль электронной системы управления/функции более высокого уровня.
Эта перешедшая под контроль более высокого уровня функция становится составной частью комплексной системы.
У.2.4 системы/функции управления высокого уровня (higher-level control systems/functions): Системы/функции, которые используют дополнительные данные и результаты их обработки для изменения поведения транспортного средства, модифицируя стандартную функцию (стандартные функции) системы управления транспортного средства.
Это позволяет комплексным системам автоматически менять приоритетность целей в зависимости от регистрируемых условий.
У.2.5 блоки (units): Наименьшие комбинации (сочетания) элементов системы, рассматриваемые в настоящем приложении как самостоятельные единицы для целей идентификации, анализа или замены.
У.2.6 каналы связи (transmission links): Средства, используемые для взаимного соединения различных блоков для передачи сигналов, обработки данных или подачи энергии.
Это оборудование обычно является электрическим, однако отдельные его части могут быть механическими, пневматическими, гидравлическими или оптическими.
У.2.7 диапазон управления (range of control): Диапазон, в пределах которого система осуществляет управление по отношению к данной выходной переменной.
У.2.8 пределы функционирования (boundary of functional operation): Границы внешних физических условий, в которых система способна осуществлять управление.
У.3 Документация
У.3.1 Требования
Изготовитель должен представить комплект документов, дающих представление об основополагающей концепции системы и средствах, которыми она связана с другими системами ТС, или с помощью которых она непосредственно управляет выходными переменными.
Должны быть разъяснены функция (функции) системы и концепция обеспечения безопасности, заложенные изготовителем.
Документы должны быть краткими, но вместе с тем в них должно быть продемонстрировано, что при проектировании и разработке системы был использован опыт, накопленный во всех смежных областях.
Для целей проведения периодических технических осмотров документы должны содержать описание способа проверки эксплуатационного состояния системы.
У.3.1.1 Документация должна состоять из двух частей:
а) официального комплекта документов для проведения испытаний, содержащего материалы, перечисленные в У.3 (за исключением материалов, указанных в У.3.4.4), который должен быть представлен испытательной лаборатории при подаче заявки на проведение испытаний. Этот комплект документов рассматривают в качестве основы при осуществлении процедуры проверки, указанной в У.4;
б) дополнительных материалов и аналитических данных, указанных в У.3.4.4, которые остаются у изготовителя, но могут быть представлены для ознакомления при проведении испытаний в испытательной лаборатории.
У.3.2 Описание функций системы
Должно быть представлено описание, содержащее простое разъяснение всех управляющих функций системы и методов, используемых для достижения намеченных результатов, включая описание механизма (механизмов), посредством которого (которых) осуществляется управление:
У.3.2.1 Должен быть представлен перечень всех полученных и вводимых переменных и определены их рабочие диапазоны.
У.3.2.2 Должен быть представлен перечень всех выходных переменных, управляемых системой, и в каждом отдельном случае указано, является ли это управление непосредственным или осуществляется через другую систему ТС. Для каждой такой переменной должен быть определен диапазон управления (см. У.2.7).
У.3.2.3 Там, где это необходимо для работы системы, должны быть установлены границы, определяющие пределы функционирования (см. У.2.8).
У.3.3 Схема и описание системы
У.3.3.1 Перечень (реестр) компонентов
Должен быть представлен перечень всех блоков системы с указанием других систем ТС, которые необходимы для реализации соответствующей управляющей функции.
Должно быть также представлено схематическое изображение этих блоков, позволяющее получить четкое представление о распределении оборудования и связях между блоками.
У.3.3.2 Функции блоков
Должны быть показаны функции каждого блока системы и указаны сигналы, связывающие его с другими блоками или с другими системами ТС, на маркированной схеме соединения блоков или другой схеме, или в описании, дополненном такой схемой.
У.3.3.3 Внутренние связи
Связи внутри системы должны быть показаны на схеме электрических цепей в случае электрических каналов связи, на схеме волоконно-оптических соединений в случае оптических каналов, на схеме трубопроводов в случае пневматического или гидравлического оборудования и на упрощенной диаграмме в случае механических соединений.
У.3.3.4 Поток сигналов и приоритеты
Должно быть четко показано соответствие между каналами связи и сигналами, передаваемыми между блоками.
Должна быть указана приоритетность передачи сигналов по мультиплексным каналам передачи данных, когда эта приоритетность может влиять на эффективность функционирования или безопасность применительно к настоящему стандарту.
У.3.3.5 Идентификация блоков
Должна быть обеспечена четкая и однозначная идентификация каждого блока (например, путем маркировки оборудования, маркировки или наличия выходных данных средств программного обеспечения) для того, чтобы можно было проверить соответствие оборудования и данных, приведенных в документации.
В тех случаях, когда функции объединены в едином блоке или в одном компьютере, а на принципиальной схеме для ясности и простоты объяснения изображены несколько блоков, для идентификации оборудования должен быть использован только один идентификационный знак.
Изготовитель посредством такой идентификации должен подтвердить, что поставленное оборудование соответствует сопроводительной документации.
У.3.3.5.1 Идентификационный знак указывает модель оборудования и версию программного обеспечения, причем, когда последние изменения таковы, что изменяют функцию блока в случаях, относящихся к настоящему стандарту, идентификационный знак также должен быть изменен.
У.3.4 Концепция безопасности, применяемая изготовителем
У.3.4.1 Изготовитель должен представить подтверждение того, что стратегия, избранная им для достижения целей системы, при нормальных условиях функционирования не окажет негативного влияния на безопасное функционирование систем, на которые распространяются требования настоящего стандарта.
У.3.4.2 Что касается программного обеспечения, используемого в системе, то должны быть разъяснены принципы его построения и указаны методы его разработки и инструментарий. Изготовитель должен быть готов, если потребуется, представить обоснования выбора логической концепции на этапе проектирования программного обеспечения.
У.3.4.3 Изготовитель должен представить испытательной лаборатории разъяснение концептуальных решений, заложенных в системе для обеспечения безопасного функционирования в условиях отказа. К таким концептуальным решениям могут относиться, например, следующие действия:
а) переход в режим частичного функционирования системы;
б) переключение на отдельную резервную систему;
в) отключение функции более высокого уровня.
В случае неисправности водитель должен быть оповещен о ее наличии, например с помощью предупреждающего сигнала или надписи, появляющейся на дисплее. Если водитель не отключает систему, например поворотом ключа в замке зажигания в положение «выключено» (off) или отключением соответствующей функции, когда для этой цели предусмотрен специальный выключатель, предупреждение о неисправности должно сохраняться до тех пор, пока она не будет устранена.
У.3.4.3.1 Если для определенных условий возникновения неисправностей предусмотрен режим частичного функционирования, то такие условия должны быть указаны и должны быть определены конечные пределы эффективности.
У.3.4.3.2 Если для достижения цели, поставленной перед системой управления ТС, выбрано переключение на резервную систему, то должны быть разъяснены принципы функционирования механизма переключения, логическая концепция и уровень дублирования, а также любые встроенные средства проверки функционирования резервной системы и определены конечные пределы эффективности.
У.3.4.3.3 Если для определенных условий предусмотрено подавление функции более высокого уровня, то все соответствующие выходные сигналы управления, связанные с этой функцией, должны подавляться таким образом, чтобы ограничить любые помехи в переходном режиме.
У.3.4.4 Документация должна быть дополнена результатами анализа, которые должны в общих чертах показывать, каким образом будет вести себя система при возникновении любой из неисправностей, которые влияют на управление ТС или на его безопасность.
Это дополнение может быть основано на анализе состояния и последствий отказов (АСПО) системы, структурном анализе сбоев (САС) или любом аналогичном процессе, отвечающем требованиям обеспечения безопасности системы.
Соответствующий анализ, выбираемый и осуществляемый изготовителем, должен быть доступным для инспекции со стороны испытательной лаборатории в период проведения испытаний.
У.3.4.4.1 Документы должны содержать классификацию параметров, подлежащих мониторингу, и устанавливать для каждого случая отказа вида, упоминаемого в У.3.4.4, предупреждающий сигнал, информирующий водителя и/или обслуживающий персонал и/или персонал технической инспекции.
У.4 Проверка и испытания
У.4.1 Должно быть проверено в испытаниях функционирование системы в соответствии с документами, наличие которых предписано в УЗ:
У.4.1.1 Проверка функции системы
В качестве способа установления нормальных уровней функционирования должна быть проведена проверка работы системы в соответствии с основной тестовой программой изготовителя в условиях отсутствия отказов, если только система не является объектом специального испытания в качестве составной части комплекса испытаний на соответствие настоящему или другому стандарту.
У.4.1.2 Проверка концепции безопасности, предписанной в У.3.4
По усмотрению испытательной лаборатории должна быть проверена реакция системы на влияние отказа любого отдельно взятого блока путем выработки соответствующих сигналов, воздействующих на электрические блоки или механические элементы, воспроизводящих эффект неисправностей внутри блока.
У.4.1.2.1 Результаты проверки должны соответствовать документированным выводам по анализу отказов (неисправностей) на таком уровне суммарного эффекта, при котором концепция безопасности и ее реальное воплощение будут признаны адекватными.
Приложение Ф
(обязательное)
Тестирование рабочих характеристик компонентов тормозной системы прицепа
Ф.1 Общие требования
Ф.1.1 Настоящее приложение устанавливает методы испытаний для определения рабочих характеристик следующих компонентов:
Ф.1.1.1 диафрагменных тормозных камер (см. Ф.2);
Ф.1.1.2 пружинных тормозов (см. Ф.3);
Ф.1.1.3 тормозов прицепов, с тестированием характеристик холодных тормозов (см. Ф.4);
Ф.1.1.4 АБС (см. Ф.5).
Примечание - Методы испытаний по определению уменьшения эффективности тормозов прицепа при нагревании и функционированию устройств автоматической регулировки тормозов описаны в приложении Л.
Ф.1.2 Отчеты об испытаниях, указанных выше, могут быть использованы при испытаниях, описанных в приложении X, или в процессе оценки на соответствие конкретным требованиям к эффективности, предъявляемым к таким прицепам.
Ф.2 Рабочие характеристики диафрагменных тормозных камер
Ф.2.1 Общие положения
Ф.2.1.1 Настоящий раздел устанавливает процедуры, с помощью которых определяют характеристики взаимосвязи толкающего усилия, хода штока и давления в диафрагменных тормозных камерах, используемых в пневматических тормозных системах 1) для генерирования сил, необходимых для механической активизации тормозов.
__________
1) Тормозные камеры других конструкций также могут быть испытаны при условии представления эквивалентной информации.
При этой проверочной процедуре секцию рабочего торможения комбинированного привода пружинного тормоза рассматривают как диафрагменную камеру.
Ф.2.1.2 Проверяемые рабочие характеристики, декларируемые изготовителем, должны быть использованы во всех расчетах, касающихся требований к совместимости тормозов (см. приложение К), требований к эффективности торможения в испытаниях «Тип-I» (см. приложение X) и в определении реального хода штока при проверке эффективности торможения «горячих» тормозов по приложению Л.
Ф.2.2 Процедура испытаний
Ф.2.2.1 За начальное (исходное) положение тормозной камеры принимают ее положение при нулевом давлении.
Ф.2.2.2 При номинальном шаге увеличения давления, меньшем или равном 1 бар в диапазоне от 1 до 8 бар и более, соответствующее генерируемое усилие отслеживают во всем реальном диапазоне хода штока при скорости перемещения штока не более 10 мм/с или при возрастании перемещения штока не более чем на 10 мм и при отклонениях действующего на перемещение штока давления не более ± 0,05 бар.
Ф.2.2.3 Для каждого шага увеличение давления в дополнении 7 к настоящему приложению даны определения среднего толкающее усилия ThA и эффективного хода штока sp.
Ф.2.3 Процедура проверки
Ф.2.3.1 В соответствии с 3.1, 3.2, 3.3 и 3.4 дополнения 1 к настоящему приложению должны быть испытаны не менее шести образцов с составлением протокола проверки при условии удовлетворения требований Ф.2.3.2, Ф.2.3.3 и Ф.2.3.4.
Ф.2.3.2 При проверке зависимости среднего толкающего усилия ThA от давления р должна быть построена диаграмма, определяющая приемлемые отклонения параметров, следуя примеру, показанному на рисунке Ф.1, и базирующаяся на декларируемой изготовителями зависимости толкающего усилия от давления. Изготовитель должен также определить категорию прицепа, для которой тормозная камера может быть использована, и соответствующее поле допуска.
Ф.2.3.3 Должно быть подтверждено значение давления р15, необходимое для генерирования хода штока 15 мм от нулевой позиции, с допуском ± 0,1 бар, в соответствии с одной из следующих процедур:
Ф.2.3.3.1 Используя декларированную зависимость усилия ThA от р, рассчитывают пороговое давление р15 в тормозной камере при ThA = 0. Затем проверяют, что при приложении этого порогового давления реализуется указанный в Ф.2.3.3 ход штока.
Ф.2.3.3.2 Изготовитель декларирует пороговое давление р15 в тормозной камере. Затем проверяют, что при приложении этого порогового давления реализуется ход штока, указанный в Ф.2.3.3.
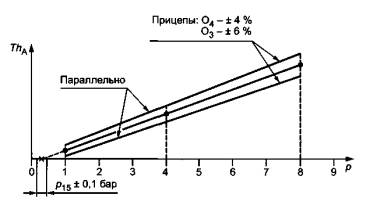
Рисунок Ф.1 - Зависимость толкающего усилия от давления в тормозной камере
Ф.2.3.4 При проверке эффективного хода штока sp как функции давления р измеренные значения sp не должны отличаться более чем на 4 % от соответствующих значений sp в декларированном изготовителем диапазоне давлений. Это значение должно быть зафиксировано и задано в 3.3.1 дополнения 1 к настоящему приложению. За пределами этого диапазона давлений допуск может превышать 4 %.
Ф.2.3.5 Результаты испытаний должны быть представлены в форме, образец которой приведен в дополнении 2 к настоящему приложению, и должны быть включены в отчет о результатах проверки в соответствии с Ф.2.4.
Ф.2.4 Отчет о результатах проверки
Ф.2.4.1 Заявленные изготовителем рабочие характеристики, подтвержденные результатами испытаний и зафиксированные в соответствии с Ф.2.3.2, должны быть представлены в форме, образец которой приведен в дополнении 1 к настоящему приложению.
Ф.3 Рабочие характеристики пружинных тормозов
Ф.3.1 Общие положения
Ф.3.1.1 Настоящий раздел устанавливает процедуру, с помощью которой для пружинных тормозов1), используемых в пневматических тормозных системах, определяют характеристики, описывающие взаимосвязь толкающего усилия, хода штока и давления, необходимые для создания усилий, требуемых в тормозах с механическим приводом.
___________
1) Пружинные тормоза других конструкций также могут быть испытаны при условии представления эквивалентной информации.
Для целей данной проверки секцию пружинных тормозов комбинированного привода пружинных тормозов рассматривают как пружинный тормоз.
Ф.3.1.2 Рабочие характеристики, декларируемые изготовителем, должны быть использованы во всех расчетах, относящихся к эффективности стояночных тормозов, приведенных в приложении X.
Ф.3.2 Процедура испытаний
Ф.3.2.1 За исходное положение камеры пружинных тормозов (пружинной камеры) принимают ее положение при максимальном давлении в камере.
Ф.3.2.2 При номинальном увеличении хода штока не более чем на 10 мм соответствующее генерируемое толкающее усилие отслеживают во всем диапазоне перемещений штока, реализуемых при нулевом давлении.
Ф.3.2.3 Затем давление непрерывно повышают до момента, когда ход штока достигнет 10 мм по отношению к исходному положению, и это давление, определяемое как «освобождающее давление (release pressure)», фиксируют.
Ф.3.2.4 Далее увеличивают давление до 8,5 бар или максимального рабочего давления, заявленного изготовителем в зависимости от того, какое давление меньше.
Ф.3.3 Процедура проверки
Ф.З.3.1 При проведении испытаний по 2.1, 3.1, 3.2 и 3.3 дополнения 3 к настоящему приложению необходимо испытать не менее шести образцов. Должен быть подготовлен отчет о результатах проверки с соблюдением следующих условий:
Ф.3.3.1.1 в диапазоне значений хода штока от 10 мм до 2/3 его максимального значения ни один результат измерений, выполненных в соответствии с Ф.3.2.2, не должен отклоняться более чем на 6 % от декларированных значений;
Ф.3.3.1.2 ни один результат, полученный при измерении в соответствии с Ф.3.2.3, не должен превышать декларированное значение;
Ф.3.3.1.3 все пружинные тормоза должны нормально функционировать после завершения испытания в соответствии с Ф.3.2.4.
Ф.3.3.2 Результаты проведенных испытаний должны быть представлены в форме, образец которой дан в дополнении 4 к настоящему приложению, и включены в отчет о результатах проверки в соответствии с Ф.3.4.
Ф.3.4 Отчет о результатах проверки
Ф.3.4.1 Заявленные (декларированные) изготовителем рабочие характеристики, подтвержденные результатами испытаний, зафиксированными в соответствии с Ф.3.3.2, должны быть представлены в форме, образец которой дан в дополнении 3 к настоящему приложению.
Ф.4 Рабочие характеристики «холодных» тормозов прицепа
Ф.4.1 Общие положения
Ф.4.1.1 Процедура относится к испытанию рабочих характеристик «холодных» пневматических тормозов прицепа с S-образным разжимным кулачком и дисковых тормозов1)
____________
1) Тормоза других конструкций также могут быть испытаны при условии представления эквивалентной информации.
Ф.4.1.2 Рабочие характеристики, декларированные изготовителем, должны быть использованы во всех расчетах, касающихся требований к совместимости тормозов (см. приложение К), а также требований к рабочему торможению в испытании «Тип-0» и к эффективности стояночных тормозов (см. приложение X).
Ф.4.2 Коэффициент торможения и пороговый тормозной момент
Ф.4.2.1 Подготовку тормоза проводят в соответствии с Ф.4.4.2.
Ф.4.2.2 Коэффициент торможения является результирующим коэффициентом усиления, достигаемым с учетом преодоления сил трения, возникающих при взаимодействии отдельных элементов сборочного узла тормоза. Его определяют как отношение момента на выходе к моменту на входе и обозначают символом BF. Этот коэффициент должен быть подтвержден для каждого материала тормозной накладки, указанного Ф.4.3.1.3.
Ф.4.2.3 Пороговый тормозной момент должен быть определен таким способом, чтобы оставаться достоверным при всех различиях в активизации тормоза. Его обозначают символом С0.
Ф.4.2.4 Значения BF должны оставаться достоверными при изменении следующих параметров:
Ф.4.2.4.1 массы, приходящейся на тормоз, вплоть до массы, указанной в Ф.4.3.1.5;
Ф.4.2.4.2 размеров и других характеристик внешних компонентов, используемых для активизации тормоза;
Ф.4.2.4.3 размеров, определяющих геометрию колес и шин.
Ф.4.3 Информационный документ
Ф.4.3.1 Изготовитель тормоза должен предоставить испытательной лаборатории, как минимум, следующую информацию:
Ф.4.3.1.1 описание типа тормоза, модели, размеров и т.п.;
Ф.4.3.1.2 детальное описание геометрии тормоза;
Ф.4.3.1.3 марку и тип тормозной накладки (тормозных накладок);
Ф.4.3.1.4 материал тормозного барабана или тормозного диска;
Ф.4.3.1.5 максимальную массу, приходящуюся на тормоз.
Ф.4.3.2 Дополнительная информация:
Ф.4.3.2.1 размеры колес и шин, используемых в испытании;
Ф.4.3.2.2 декларируемый коэффициент торможения BF;
Ф.4.3.2.3 декларируемый пороговый момент С0.
Ф.4.4 Процедура испытания
Ф.4.4.1 Подготовка к испытанию
Ф.4.4.1.1 Необходимо построить график, определяющий приемлемые отклонения эффективности торможения, по образцу, показанному на рисунке Ф.2, используя декларируемый изготовителем коэффициент торможения.
Ф.4.4.1.2 Рабочую характеристику устройства, используемого для активизации тормоза, необходимо тарировать с точностью 1 %.
Ф.4.4.1.3 Динамический радиус шины под действием испытательной нагрузки должен быть определен в соответствии с предписанным методом.
Ф.4.4.2 Процедура обкатки (притирки)
Ф.4.4.2.1 Испытания барабанных тормозов должны быть начаты с использованием новых тормозных накладок и нового барабана (новых барабанов), при этом тормозные накладки должны быть притерты для достижения наилучшего первоначального контакта накладки (накладок) с барабаном.
Ф.4.4.2.2 Испытания дисковых тормозов должны быть начаты с использованием новых тормозных накладок и нового диска (новых дисков), при этом подгонка материала накладки (накладок) должна быть осуществлена по усмотрению изготовителя.
Ф.4.4.2.3 Выполняют 20 активизаций тормоза при начальной скорости 60 км/ч и с приложением к тормозу усилия, эквивалентного 0,3TR/ТМ, где ТМ - испытательная масса. Начальная температура в контакте накладки/барабана или накладки/диска не должна превышать 100 °С перед каждой активизацией тормоза.
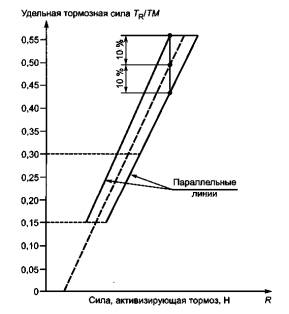
ТМ - масса, приходящаяся на испытуемый тормоз (испытательная масса)
Рисунок Ф.2 - Зависимость эффективности торможения от силы, активизирующей тормоз
Ф.4.4.2.4 Выполняют 30 активизаций тормоза, каждая из которых начинается при скорости 60 км/ч и заканчивается при 30 км/ч, с приложением к тормозу усилия, эквивалентного 0,3 TR/ТМ, и с интервалом времени между активизациями - 60 с 1)
___________
1) При испытаниях на треке или барабанном стенде необходимо использовать энергетические эквиваленты указанных здесь параметров.
Ф.4.4.2.5 По завершении 30 активизаций в соответствии с Ф.4.4.2.4 и после интервала 120 с выполняют 5 активизаций тормоза при начальной скорости 60 км/ч с последующим ее снижением до 30 км/ч и приложением к тормозу усилия, эквивалентного 0,3 TR/ТМ, и с интервалом времени между активизациями - 120 с 1).
___________
1) При испытаниях на треке или барабанном стенде необходимо использовать энергетические эквиваленты указанных здесь параметров.
Ф.4.4.2.6 Затем выполняют 20 активизаций тормоза при начальной скорости 60 км/ч и с приложением к тормозу усилия, эквивалентного 0,3 TR/ТМ. Начальная температура в зоне контакта накладки/барабана или накладки/диска не должна превышать 150 °С перед каждой активизацией тормоза.
Ф.4.4.2.7 После этих процедур выполняют проверку эффективности в следующем порядке:
Ф.4.4.2.7.1 Определяют моменты на входе для воспроизведения теоретических значений эффективности торможения, эквивалентных 0,2 TR/ТМ, 0,35 TR/ТМ и 0,5 TR/ТМ с допусками ± 0,05 TR/ТМ.
Ф.4.4.2.7.2 После определения момента на входе для каждого значения удельной тормозной силы убеждаются, что это значение остается неизменным при каждой последующей активизации (например, благодаря сохранению постоянного значения давления).
Ф.4.4.2.7.3 Выполняют активизацию тормоза при каждом значении момента на входе, определенном в Ф.4.4.2.7.1, при начальной скорости 60 км/ч. Начальная температура в зоне контакта накладки/барабана или накладки/диска не должна превышать 150 °С перед каждой активизацией.
Ф.4.4.2.8 Повторяют процедуры, описанные в Ф.4.4.2.6 и Ф.4.4.2.7.3, пока эффективность торможения в пяти последовательных измерениях при каждом моменте на входе не стабилизируется с допуском ± 5 %.
Ф.4.4.2.9 В случае выполнения этих процедур на инерционном динамометрическом стенде или барабанном стенде допускается неограниченное использование охлаждающего воздуха.
Ф.4.4.3 Подтверждающее испытание
Ф.4.4.3.1 Температура, измеренная в зоне контакта накладки с диском или накладки с барабаном в начале активизации тормоза, не должна превышать 100 °С.
Ф.4.4.3.2 Пороговый тормозной момент определяют по измеренному значению тормозного момента на входе с помощью тарированного устройства ввода тормозного момента.
Ф.4.4.3.3 Начальная скорость для всех вариантов активизации тормоза - (60 ± 2) км/ч.
Ф.4.4.3.4 Выполняют не менее шести последовательных активизаций тормоза с возрастанием отношений TR/TM от 0,15 до 0,55 при увеличении прилагаемого давления, после чего выполняют шесть последовательных активизаций тормоза с теми же значениями прилагаемого давления, но при его последовательном уменьшении.
Ф.4.4.3.5 Для каждой активизации тормоза в соответствии с Ф.4.4.3.4 рассчитывают удельную тормозную силу, скорректированную с учетом сопротивления качению, и строят график, образец которого показан на рисунке Ф.2.
Ф.4.5 Методы испытаний
Ф.4.5.1 Испытание на опорной поверхности
Ф.4.5.1.1 Испытание эффективности торможения должно быть проведено только на одиночной оси.
Ф.4.5.1.2 Испытание должно быть проведено на прямом горизонтальном участке с достаточно высокими сцепными свойствами при отсутствии ветра, который мог бы повлиять на получаемые результаты.
Ф.4.5.1.3 Прицеп должен быть нагружен до состояния, возможно более близкого к максимальной массе, приходящейся на каждый тормоз, однако допускается загрузка дополнительной массой для обеспечения в процессе испытания отношения TR к максимальной массе прицепа, приходящейся на тормоз, равного 0,55, без блокировки колес.
Ф.4.5.1.4 Динамический радиус качения шины может быть проверен на малой скорости (менее 10 км/ч) измерением расстояния, пройденного колесом, и соответствующего угла вращения колеса. При этом число оборотов колеса, необходимое для определения динамического радиуса качения, должно быть не менее 10.
Ф.4.5.1.5 Сопротивление качению комбинации ТС определяют измерением времени, необходимого для уменьшения скорости ТС с 55 до 45 км/ч, и пройденного за это время расстояния. Данное испытание должно быть проведено на том же участке и в том же направлении, что и последующая проверка эффективности торможения, при отсоединенном двигателе и отключении любой системы торможения длительного действия.
Ф.4.5.1.6 Должны быть активизированы только тормоза оси, подвергаемой испытанию. При этом давление на входе в устройство, активизирующее тормоз, должно, после периода возрастания, не превышающего 0,7 с, достичь 90 % ± 3 % его асимптотического значения. Испытание должно быть выполнено при отсоединенном двигателе и отключении любой системы торможения длительного действия.
Ф.4.5.1.7 В начале испытания тормоза должны быть отрегулированы на минимальный зазор.
Ф.4.5.1.8 Начало воздействия на тормоз с целью рассчитать пороговый тормозной момент определяют на вывешенном колесе при постепенной активизации тормоза и прокручивании колеса рукой до появления ощутимого сопротивления вращению.
Ф.4.5.1.9 Конечную скорость торможения v2 определяют в соответствии с 3.1.5 дополнения 2 к приложению Л.
Ф.4.5.1.10 Эффективность торможения оси, подвергающейся испытанию, определяют по замедлению, рассчитываемому по результатам непосредственного измерения скорости и дистанции, пройденной ТС при уменьшении скорости от 0,8v2 до v2, при условии, что v2 равна не менее 0,1 v1. Предполагают, что это замедление эквивалентно среднему значению предельного замедления (см. приложение В).
Ф.4.5.2 Испытание на инерционном динамометрическом стенде
Ф.4.5.2.1 Испытание должно быть выполнено на отдельном тормозе в сборе.
Ф.4.5.2.2 Испытательный стенд должен быть способен воспроизводить инерционные характеристики, определяемые по Ф.4.5.2.5.
Ф.4.5.2.3 Испытательный стенд должен быть тарирован по скорости и тормозному моменту на выходе с точностью 2 %.
Ф.4.5.2.4 При испытании должно быть обеспечено получение, как минимум, следующих данных:
Ф.4.5.2.4.1 непрерывных записей тормозного давления, развивающегося в тормозном приводе, или усилия в нем;
Ф.4.5.2.4.2 непрерывной записи тормозного момента на выходе;
Ф.4.5.2.4.3 непрерывной записи температуры, измеренной в зоне контакта накладки с барабаном или накладки с диском;
Ф.4.5.2.4.4 частоты вращения в процессе испытания.
Ф.4.5.2.5 Момент инерции Iт испытательного стенда подбирают так, чтобы он был максимально близким к эквиваленту той части массы ТС, которая приходится на одно колесо и которая требуется для получения значения отношения TR к максимальной массе прицепа, приходящейся на тормоз, равного 0,55, с допуском ± 5 % при учете внутреннего трения в стенде. Действительный момент инерции испытательного стенда Iт, кг·м2, вычисляют по формуле
Iт = PdR2,
где R - радиус качения шины, определяемый как R = 0,485 D;
D - наружный диаметр шины: D = d + 2Н (см. ГОСТ Р 41.54);
d - номинальный диаметр обода, мм;
Н - номинальная высота профиля шины, мм: Н = S1·0,01Ra;
S1 - ширина профиля, мм;
Ra - номинальное отношение высоты профиля шины к ее ширине;
Рd - максимально допустимая масса, приходящаяся на один тормоз, указываемая в Ф.4.3.1.5.
Ф.4.5.2.6 Для охлаждения допускается использовать воздух, обдувающий тормоз при наружной температуре со скоростью, не превышающей 0,33v, в направлении, перпендикулярном к оси вращения тормоза.
Ф.4.5.2.7 Перед началом испытания тормоз должен быть тщательно отрегулирован.
Ф.4.5.2.8 Перед расчетом порогового тормозного момента усилие на входе в тормоз определяют постепенным увеличением степени активизации тормоза до появления тормозного момента на выходе.
Ф.4.5.2.9 Эффективность торможения определяют по измеренному тормозному моменту на выходе с использованием формулы
![]()
где zR - удельная тормозная сила;
Mt - средний тормозной момент на выходе, рассчитанный на участке торможения, Н·м;
g - ускорение силы тяжести, м/с2.
Средний тормозной момент на выходе Mt рассчитывают по замедлению, определяемому на основе результатов непосредственных измерений скорости и пройденного расстояния в промежутке между скоростями 0,8v1 и 0,1v1 Принимают, что это замедление эквивалентно среднему значению предельного замедления (см. приложение В).
Ф.4.5.3 Испытание на барабанном стенде
Ф.4.5.3.1 Испытанию должна быть подвергнута одиночная ось с одним или двумя тормозами.
Ф.4.5.3.2 Испытательный стенд должен иметь тарированные средства для приложения соответствующей нагрузки, чтобы имитировать массу, приходящуюся на тормоз (тормоза), подлежащий испытанию.
Ф.4.5.3.3 Испытательный стенд должен быть тарирован по скорости и тормозному моменту с точностью 2 % с учетом внутреннего трения. Динамический радиус качения шины R определяют, используя измерения частот вращения барабана и незаторможенных колес оси, подвергаемых испытанию, при частоте вращения, эквивалентной 60 км/ч, по формуле
![]()
где RR - радиус барабана стенда;
п0 - частота вращения барабана;
nw - частота вращения незаторможенных колес оси.
Ф.4.5.3.4 Для охлаждения допускается использовать воздух, обдувающий тормоз (тормоза) при наружной температуре со скоростью, не превышающей 0,33v.
Ф.4.5.3.5 Перед началом испытания тормоз (тормоза) должен быть тщательно отрегулирован.
Ф.4.5.3.6 Требуемое для расчета порогового тормозного момента усилие на входе в тормоз определяют постепенным увеличением степени активизации тормоза до появления ощутимого тормозного момента на выходе.
Ф.4.5.3.7 Эффективность торможения определяют по результату измерения тормозной силы на периферии шины, пересчитывая ее в удельную тормозную силу с учетом сопротивления качению. Сопротивление качению оси под нагрузкой определяется по измеренному значению силы на периферии шины при скорости 60 км/ч.
Среднее значение тормозного момента на выходе Мt определяют на основе его значений, полученных при измерении в промежутке между моментом времени, когда давление (сила) в тормозном приводе достигает своего асимптотического значения после начала возрастания давления, и моментом времени, когда подводимая энергия достигнет значения W60 (см. Ф.4.5.3.8).
Ф.4.5.3.8 При определении удельной тормозной силы необходимо учитывать подводимую энергию W60, эквивалентную кинетической энергии, отдаваемой массой, приходящейся на тормоз, подвергаемый испытанию, при торможении со скорости 60 км/ч до полной остановки. Подводимую энергию определяют по формуле

Ф.4.5.3.8.1 Если в процессе определения удельной тормозной силы в соответствии с Ф.4.5.3.8 отсутствует возможность поддерживания скорости v в диапазоне (60 ± 2) км/ч, удельную тормозную силу определяют на основе результатов непосредственного измерения силы торможения FB и/или тормозного момента на выходе Мt таким образом, чтобы на эти параметры не оказывали влияние динамические силы, генерируемые инерционными массами барабанного стенда.
Ф.4.6 Отчет о результатах проверки
Ф.4.6.1 Рабочие характеристики тормозов, декларированные изготовителем и подтвержденные результатами испытаний, оформленными в соответствии с Ф.4.4.3, должны быть представлены в форме, образец которой дан в дополнении 3 к приложению Л.
Ф.5 Антиблокировочные тормозные системы (АБС)
Ф.5.1 Общие положения
Ф.5.1.1 Настоящий раздел устанавливает процедуру проверки рабочих характеристик АБС прицепа.
Ф.5.1.2 Испытания, проводимые на прицепах категории O4, распространяются и на проверку требований, относящихся к прицепам категории O3.
Ф.5.2 Информационный документ
Ф.5.2.1 Изготовитель АБС должен представить испытательной лаборатории информационный документ, касающийся системы (систем), рабочие характеристики которой подлежат проверке. Этот документ должен содержать, как минимум, информацию в соответствии с дополнением 5 к настоящему приложению.
Ф.5.3 Отбор транспортных средств, подлежащих испытанию
Ф.5.3.1 Основываясь на сведениях, содержащихся в информационном документе, и, в особенности, на сообщаемых в 2.1 дополнения 5 к настоящему приложению, испытательная лаборатория должна провести испытания на прицепах, являющихся типичными представителями соответствующего семейства, имеющих не более трех осей и оборудованных соответствующими АБС. Кроме того, параметры прицепов, отобранных для испытаний, должны соответствовать следующим условиям:
Ф.5.3.1.1 Тип подвески
Метод оценки рабочих характеристик АБС по отношению к типу подвески выбирают следующим образом:
- полуприцепы - для подвесок каждого типа (например, для подвесок балансирного типа) проводят оценку полуприцепа, типичного для подвески этого типа;
- полные прицепы - проводят оценку типичного прицепа, оборудованного подвеской одного (любого) типа.
Ф.5.3.1.2 Колесная база:
- для полуприцепов колесная база не является лимитирующим фактором;
- в случае полных прицепов отбирают прицеп с наименьшей колесной базой.
Ф.5.3.1.3 Тип тормозов:
- ограничиваются оценкой барабанных тормозов с S-образными кулачками или дисковых тормозов, однако если появятся тормоза других типов, то могут потребоваться соответствующие сравнительные испытания.
Ф.5.3.1.4 Устройство, реагирующее на нагрузку:
- реализация сцепных свойств определяется установкой клапана устройства в позицию наличия нагрузки или позицию отсутствия нагрузки. Во всех случаях применимы требования Н.2.7 (приложение Н).
Ф.5.3.1.5 Активизация тормозов:
- в процессе испытания должны быть зафиксированы отклонения в степени активизации тормозов, чтобы оценить реализацию сцепных свойств. Результаты, полученные в испытании одного прицепа, могут быть распространены на другие прицепы того же типа.
Ф.5.3.2 Для прицепов каждого типа, подвергаемых испытаниям, должна быть подготовлена документация, доступная для ознакомления, подтверждающая совместимость тормозов в соответствии с приложением К (рисунки К.4, К.6 и К.7).
Ф.5.3.3 С точки зрения оценки тормозных характеристик полуприцепы и прицепы могут быть рассмотрены как ТС одного типа.
Ф.5.4 Программа испытаний
Ф.5.4.1 Перечисленные ниже испытания должны быть выполнены испытательной лабораторией на ТС, отобранном (отобранных) в соответствии с Ф.5.3 для каждой конфигурации АБС с учетом перечня вариантов применения (см. 2.1 дополнения 5 к настоящему приложению). Однако при наличии ссылки на наименее благоприятный вариант допускается не проводить определенные испытания. Если испытания по наименее благоприятному варианту были проведены, это должно быть отражено в отчете об испытаниях (см. Ф.5.5).
Ф.5.4.1.1 Реализация сцепных свойств
Испытания выполняют в соответствии с процедурой, описанной в Н.6.2 (приложение Н), для каждой конфигурации АБС и каждого типа прицепа в соответствии с информацией, предоставляемой изготовителем (см. 2.1 дополнения 5 к настоящему приложению).
Ф.5.4.1.2 Расход энергии
Ф.5.4.1.2.1 Нагрузка на ось
Прицеп (прицепы), подлежащий испытанию, должен быть нагружен так, чтобы осевая нагрузка (масса, приходящаяся на ось) составляла либо (2500 ± 200) кг, либо 35 % ± 200 кг допустимой статической нагрузки на ось в зависимости от того, какое значение меньше.
Ф.5.4.1.2.2 Необходимо обеспечить выполнение полного цикла ABC в процессе динамических испытаний, проводимых в соответствии с Н.6.1.3 (приложение Н).
Ф.5.4.1.2.3 Испытание по определению расхода энергии
Испытание выполняют в соответствии с процедурой, описанной в Н.6.1 (приложение Н), для каждой конфигурации АБС.
Ф.5.4.1.2.4 На прицепах, отобранных для подтверждения соответствия расхода энергии АБС соответствующим требованиям (см. Н.6.1), должны быть выполнены следующие операции:
Ф.5.4.1.2.4.1 Перед началом испытания по определению расхода энергии (см. Ф.5.4.1.2.3) тормоза, не имеющие интегрированного устройства компенсации износа, должны быть отрегулированы так, чтобы отношение хода штока к длине рычага привода тормоза Rl составляло
![]()
где sT - ход штока тормозной камеры;
lт - длина рычага привода тормоза.
Rl должно быть определено при давлении в тормозной камере, равном 6,5 бар.
Пример
lт = 130 мм; sT = 26 мм (при давлении в тормозной камере, равном 6,5 бар).
![]()
Если тормоза имеют интегрированное устройство автоматической компенсации износа, в них должен быть обеспечен нормальный рабочий зазор, рекомендованный изготовителем.
Регулировки, указанные выше, должны быть выполнены при «холодных» тормозах (при температуре менее 100 °С).
Ф.5.4.1.2.4.2 При клапане, регулирующем режим работы АБС в зависимости от нагрузки, установленном в положение «Нагрузка», и первоначальном уровне аккумулированной энергии, установленном в соответствии с Н.6.1.2 (приложение Н), аккумулятор (аккумуляторы) энергии должен быть отсоединен от источника подачи сжатого воздуха. Тормоза должны быть активизированы при управляющем давлении 6,5 бар в соединительной головке и затем отпущены. Дальнейшие циклы активизации тормозов выполняют до тех пор, пока давление в тормозных камерах не станет таким же, как и после проведения испытаний, описанных в Ф.5.4.1.2.1 и Ф.5.4.1.2.2. Полученное число эквивалентных активизаций тормозов nеr должно быть зафиксировано.
Значение числа эквивалентных статических активизаций пе - 1,2 nеr должно быть округлено до ближайшего целого числа и приведено в отчете об испытаниях.
Ф.5.4.1.3 Испытание при различающихся сцепных свойствах опорной поверхности под левыми и правыми колесами
Если АБС относится к категории А, то на все конфигурации такой АБС распространяются требования к рабочим характеристикам, установленные в Н.6.3.2 (приложение Н).
Ф.5.4.1.4 Эффективность АБС на малой и высокой скоростях
Ф.5.4.1.4.1 На прицепе, оборудованном как для проверки сцепных свойств, оценка эффективности АБС при малой и высокой скоростях должна быть выполнена в соответствии с Н.6.3.1 (приложение Н).
Ф.5.4.1.4.2 Если существуют допустимые отклонения в соотношении пиков сигнала возбуждения АБС и длины окружности шины, то необходимо проверить функционирование АБС при предельных отклонениях этих параметров в соответствии с Н.6.3 (приложение Н). Такая проверка может быть проведена с использованием шин различных размеров или генерированием специальных возбуждающих сигналов для имитации предельных частотных характеристик.
Ф.5.4.1.5 Дополнительные проверки
Должны быть выполнены следующие дополнительные проверки при незаторможенном буксирующем ТС и порожнем прицепе:
Ф.5.4.1.5.1 Когда тележка прицепа со сближенными осями переходит с поверхности, имеющей высокий коэффициент сцепления kн, на поверхность с низким коэффициентом сцепления kL при выполнении условий kн ≥ 0,5 и kн/kL ≥ 2 и при давлении в управляющей магистрали (в соединительной головке), равном 6,5 бар, колеса, непосредственно управляемые АБС, не должны блокироваться. Скорость движения и момент активизации тормозов прицепа рассчитывают так, чтобы при работе АБС по полному циклу на поверхности с высоким коэффициентом сцепления прицеп переходил с одной поверхности на другую при скоростях движения, приблизительно равных 80 и 40 км/ч.
Ф.5.4.1.5.2 Когда прицеп переходит с поверхности, имеющей низкий коэффициент сцепления kL, на поверхность с высоким коэффициентом сцепления kн при выполнении условий kн ≥ 0,5 и kн/kL ≥ 2 и при давлении в управляющей магистрали (в соединительной головке), равном 6,5 бар, давление в тормозных камерах должно возрасти до соответствующего высокого уровня в приемлемый отрезок времени, а прицеп не должен отклоняться от своего первоначального направления движения. Скорость движения и момент активизации тормозов прицепа рассчитывают так, чтобы при работе АБС по полному циклу на поверхности с низким коэффициентом сцепления прицеп переходил с одной поверхности на другую при скорости движения приблизительно 50 км/ч.
Ф.5.4.1.6 Документация, относящаяся к контроллеру (контроллерам), должна содержать сведения согласно 5.1.5 и Н.4.1 (приложение Н), включая примечание.
Ф.5.5.1 Должен быть подготовлен отчет, содержание которого описано в дополнении 6 к настоящему приложению.
Дополнение 1
к приложению Ф
Образец отчета о подтверждении заявленных характеристик диафрагменных тормозных камер
|
Отчет № . . . . . . . . . . . . . . . . . 1 Идентификация: 1.1 Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Марка 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Тип 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4 Номер детали 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Условия работы: 2.1 Максимальное рабочее давление . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Рабочие характеристики, декларируемые изготовителем: 3.1 Максимальный ход штока smax при давлении 6,5 бар 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Среднее толкающее усилие на штоке как функция давления ThА = f(p) 2) . . . . . . . . . . . . . 3.3 Эффективный ход штока как функция давления sp = f(p) 2) . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Диапазон давлений, за пределами которого упомянутый ход штока признают значимым (см. Ф.2.3.4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Значение давления, необходимое для осуществления хода штока, равного 15мм (р15), определяют на основе зависимости ThА = f(p) или декларируют 2), 3), 4) 4 Область применения: Тормозная камера может быть использована на прицепах категорий O3 и O4 .... да/нет 3) Тормозная камера может быть использована только на прицепах категории O3 .... да/нет 3) 5 Наименование испытательной лаборатории, проведшей испытание . . . . . . . . . . . . . . . . . 6 Настоящее испытание проведено и результаты получены в соответствии с дополнением 1 к приложению Ф ГОСТ Р 41.13-2007 Испытательная лаборатория, проведшая испытания Дата . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 7 Документы, относящиеся к испытанию . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . (см. дополнение 2) . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ____________ 1) Для нанесения маркировки на тормозную камеру. В отчете об испытаниях требуется привести только основной номер, варианты основной модели можно не указывать. 2) Идентификация должна быть уточнена при наличии изменений, которые оказывают влияние на рабочие характеристики, перечисленные в 3.1-3.3 настоящего дополнения. 3) Ненужное зачеркнуть. 4) Для применения характеристик, приведенных в настоящем отчете, при определении соответствия требованиям приложения К взаимосвязь давления р15 и декларированной зависимости ThA = f(р) при давлении, равном 1,0 бар, считают линейной.
|
Дополнение 2
к приложению Ф
Образец записи первичных данных о результатах испытания диафрагменных тормозных камер
Отчет № . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Результаты испытаний 1) для детали № . . . . . . . . . . . . . . . . . . .
_______________
1) Для каждого из шести испытанных образцов составляют отдельный отчет.
|
Давление1) р, бар |
Среднее толкающее усилие ThA, Н |
Эффективный ход штока sp, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) p - значения давления активизации тормозов, используемые в испытании (см. Ф.2.2.2). |
||
Дополнение 3
к приложению Ф
Образец отчета о подтверждении характеристик пружинных тормозов
|
Отчет № . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Идентификация: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Изготовитель (наименование и адрес) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Марка 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Тип 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4 Номер детали 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Условия работы: 2.1 Максимальное рабочее давление . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Рабочие характеристики, декларируемые изготовителем: 3.1 Максимальный ход штока smax 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Среднее толкающее усилие на штоке как функция давления ThА = f(p) 2) . . . . . . . . . . . . . 3.3 Давление освобождения тормоза (при ходе штока, равном 10 мм) 2) . . . . . . . . . . . . . . . . . 4 Дата проведения испытаний . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Настоящее испытание проведено и результаты получены в соответствии с приложением Ф к ГОСТ Р 41.13-2007 6 Испытательная лаборатория, проведшая испытания Дата . . . . . . . . . . . . . . . . . . Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Документы, относящиеся к испытанию (см. дополнение 4) . . . . . . . . . . . . . . . . . . . . . . . . . . _____________ 1) Для нанесения маркировки на тормозную камеру. В отчете об испытаниях требуется привести только основной номер, варианты основной модели можно не указывать. 2) Идентификация должна быть уточнена при наличии изменений, которые оказывают влияние на рабочие характеристики, перечисленные в 3.1 - 3.3 настоящего дополнения.
|
Дополнение 4
к приложению Ф
Образец записи первичных данных о результатах испытания пружинных тормозов
Отчет № . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Результаты испытаний 1) для детали № . . . . . . . . . . . . . . . . . . . . . . . . .
__________
1) Для каждого из шести испытанных образцов составляют отдельный отчет.
|
Ход штока 1) s, мм |
Толкающее усилие Ths, H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) s - значение хода штока, активизирующего тормоз, подвергаемый испытанию (см. Ф.3.2.2). |
|
2 Давление освобождения тормоза (при ходе штока, равном 10 мм) . . . . . . . . . . . . . . . . . . . бар
Дополнение 5
к приложению Ф
Информационный документ о технических характеристиках антиблокировочной системы прицепов
|
1 Общие сведения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 Наименование изготовителя . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Наименование антиблокировочной системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Варианты антиблокировочной системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4 Конфигурации антиблокировочной системы (например, 2S/1M, 2S/2M 1)) . . . . . . . . . . . . 1.5 Описание функций и/или общих принципов антиблокировочной системы . . . . . . . . . . . . 2 Области применения 2.1 Перечень типов прицепов и конфигураций антиблокировочной системы, для которых требуется подтверждение значений параметров (характеристик) в испытаниях . . . . . . . . . . . . . 2.2 Схемы конфигураций антиблокировочной системы, устанавливаемых на прицепы, перечисленные в 2.1 настоящего дополнения. Указывают следующие данные: расположение датчиков . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . расположение модуляторов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . поднимаемые оси . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . управляемые оси . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . тормозные шланги: внутренние диаметры и длины . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Отношение длины окружности шины к разрешающей способности устройства возбуждения, включая допуски . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Допуск длины окружности шин, установленных на разных осях и присоединенных к одному устройству возбуждения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5 Область применения в зависимости от типа подвески: пневматическая подвеска - любой тип балансирной подвески с продольными рычагами подвеска другого типа - описание дается изготовителем: модель и тип (балансирная/небалансирная) 2.6 Рекомендации по конкретным значениям тормозного момента на входе (если применимо) в зависимости от конфигурации антиблокировочной системы и конструкции тележки прицепа . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7 Дополнительная информация (если необходимо) по установке антиблокировочной системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Описание компонентов 3.1 Датчик (датчики) Функция . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Идентификация, например номер детали (номера деталей) . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Контроллер (контроллеры) Общее описание и функция . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Идентификация, например номер детали (номера деталей) Требования безопасности, относящиеся к контроллеру (контроллерам) . . . . . . . . . . . . . . . . . Дополнительные особенности (например, управление замедлителем, автоматика, изменяемые параметры, средства диагностики) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Модулятор (модуляторы) Общее описание и функция . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Идентификация, например номер детали (номера деталей) . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ограничения (например, максимальные объемы информации, на которые рассчитан модулятор) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Электрооборудование Электрическая схема (схемы) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Способы подачи электроэнергии . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Последовательность включения предупреждающих ламп . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5 Пневматические контуры Схемы тормозных систем, включающие в себя конфигурации антиблокировочной системы, в зависимости от типов прицепов, определенных в 5.2.2. Ограничения размеров (внутренних диаметров, длин) патрубков и шлангов, если они влияют на работу системы (например, на взаимосвязь модулятора и тормозной камеры) 3.6 Электромагнитная совместимость 3.6.1 Документация, демонстрирующая соответствие требованиям Н.4.4 (приложение Н). ___________ 1) S - датчики; М - модуляторы.
|
Дополнение 6
к приложению Ф
Отчет об испытании антиблокировочной системы прицепов
|
Отчет об испытании № . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Идентификация: 1.1 Изготовитель антиблокировочной системы (наименование и адрес) . . . . . . . . . . . . . . . . . 1.2 Наименование системы/модель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Антиблокировочная система и ее монтаж, прошедшие сертификацию: 2.1 Сертифицированные конфигурации антиблокировочной системы (например, 2S/1M, 2S/M 1)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Область применения (тип прицепа и число осей) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Методы электроснабжения (по [1] - [4] и др.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Идентификация сертифицированных датчиков, контроллеров и модуляторов . . . . . . . . . 2.5 Расход энергии - эквивалентное число активизаций тормозов на неподвижном прицепе . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6 Дополнительные особенности, например управление замедлителем, наличие и расположение подъемных осей и т.п. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Данные об условиях проведения испытания и результаты: 3.1 Сведения о транспортном средстве, подвергнутом испытанию . . . . . . . . . . . . . . . . . . . . . 3.2 Информация об опорной поверхности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Результаты испытания 3.3.1 Реализация сцепных свойств . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.2 Расход энергии . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.3 Испытания при различающихся условиях сцепления правых и левых колес . . . . . . . . . 3.3.4 Эффективность торможения на малой скорости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.5 Эффективность торможения на высокой скорости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.6 Дополнительные проверки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.6.1 Переход с поверхности, имеющей высокий коэффициент сцепления, на поверхность с низким коэффициентом сцепления 3.3.6.2 Переход с поверхности, имеющей низкий коэффициент сцепления, на поверхность с высоким коэффициентом сцепления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.7 Имитация возникновения неисправности . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.8 Проверки функционирования при вспомогательных вариантах электропитания . . . . . 3.3.9 Электромагнитная совместимость . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Ограничения, касающиеся установки: 4.1 Отношение длины окружности шины к разрешающей способности устройства возбуждения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Допуск длин окружности шин, установленных на разных осях и присоединенных к одному устройству возбуждения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Тип подвески . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4 Различия в тормозных моментах на входе в пределах тележки прицепа . . . . . . . . . . . . . . 4.5 Колесная база полного прицепа . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.6 Тип тормозов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7 Внутренние диаметры и длины тормозных шлангов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.8 Применение устройств, чувствительных к нагрузке на оси . . . . . . . . . . . . . . . . . . . . . . . . . 4.9 Последовательность включения предупреждающих (аварийных) ламп . . . . . . . . . . . . . . 4.10 Конфигурации и установки, соответствующие требованиям к антиблокировочной системе категории А . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.11 Другие рекомендации/ограничения (например, расположение датчиков, модуляторов, подъемных осей, управляемых осей) 5 Дата проведения испытания . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Настоящее испытание проведено и результаты получены в соответствии с приложением Ф к ГОСТ Р 41.13 - 2007 Испытательная лаборатория, выполнившая испытание Подпись . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Дата . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Приложение - информационный документ, представленный изготовителем. _________ 1) S - датчики; М - модуляторы.
|
Дополнение 7
к приложению Ф
Условные обозначения
(см. рисунок Ф.3)
BF - коэффициент торможения (отношение момента на выходе из тормоза к моменту на входе в тормоз);
С0 - пороговый момент на входе в тормоз (минимальный момент, необходимый для получения значимого тормозного момента на выходе);
D - наружный диаметр шины (диаметр, измеренный по периферии новой накачанной шины);
d - стандартное обозначение номинального диаметра обода, соответствующее диаметру обода, выраженному в дюймах или миллиметрах;
FB - тормозная сила;
Н - номинальная высота профиля шины (расстояние, равное половине разности между наружным диаметром шины и номинальным диаметром обода);
I - момент инерции;
lт - длина рычага привода тормоза эталонного испытуемого прицепа;
Мt - средний тормозной момент на выходе из тормоза;
пе - эквивалентное число активизаций тормоза неподвижного прицепа, необходимое для положительной оценки результатов испытания;
пеr - эквивалентное число активизаций тормоза неподвижного прицепа, полученное в испытании;
nD - частота вращения барабана барабанного стенда;
nw - частота вращения незаторможенных колес оси;
РD - максимально допустимая масса, приходящаяся на один тормоз;
р - давление;
р15 - давление в тормозной камере, требуемое для получения хода штока, равного 15 мм относительно его исходного положения;
R - динамический радиус качения шины (при расчетах принимают R = 0.485D);
Ra - условная высота профиля шины (отношение номинальной высоты к номинальной ширине профиля шины, умноженное на 100);
Rl - отношение sT/lт;
RR - радиус барабана барабанного стенда;
St - ширина профиля шины (расстояние между плоскостями, касательными к боковинам накачанной шины, за вычетом высоты выступов, образованных маркировкой, декоративными элементами, защитными элементами боковины и т.п.);
s - ход штока привода тормоза, равный сумме рабочего хода и свободного хода;
smax - максимальный ход штока привода тормоза;
sp - эффективный ход штока (ход, при котором толкающее усилие на выходе составляет 90 % среднего толкающего усилия ThА);
sT - ход штока тормозной камеры эталонного испытуемого прицепа, мм;
ThА - среднее толкающее усилие (определяется осреднением значений толкающего усилия в диапазоне от 1/3 smax до 2/3 smax);
Ths - усилие пружины пружинного тормоза;
TR - суммарное тормозное усилие на периферии всех колес прицепа;
V - скорость в испытании на поверхности бегового барабана барабанного стенда;
v1 - начальная скорость торможения;
v2 - конечная скорость торможения;
W60 - подаваемая энергия, эквивалентная кинетической энергии, выделяемой соответствующей массой, приходящейся на тормоз, при торможении в процессе испытания со скорости 60 км/ч до остановки;
z - удельная тормозная сила транспортного средства.
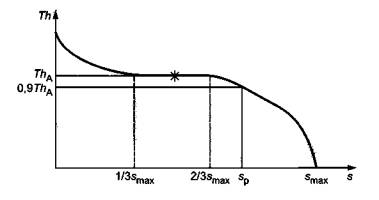
Рисунок Ф.3 - Зависимость толкающего усилия на штоке тормозной камеры от хода штока
Приложение X
(обязательное)
Альтернативная процедура оценки тормозов прицепов
Х.1 Общие положения
Х.1.1 Настоящее приложение определяет альтернативную процедуру оценки тормозных свойств прицепов на основе использования информации из отчетов об испытаниях, подготовленных в соответствии с приложениями Л и Ф.
Х.1.2 По завершении процедур подтверждения, описанных в Х.3-Х.8, испытательная лаборатория должна подготовить отчет, соответствующий образцу, приведенному в дополнении 1 к приложению Б.
Х.1.3 Для проведения расчетов в соответствии с настоящим приложением необходимо определить высоту центра масс методом, описанным в дополнении 1 к настоящему приложению.
Х.2 Документация, представляемая изготовителем
Х.2.1 Изготовитель прицепа должен представить испытательной лаборатории, как минимум, следующее:
Х.2.1.1 Копии официальных документов, подтверждающих соответствие эталонного прицепа требованиям настоящего стандарта, на основе которых базируется дальнейшее сравнение эффективности рабочего торможения. Эталонный прицеп должен быть ранее подвергнут реальным испытаниям, предписанным для соответствующего прицепа в приложении В. Прицеп, тормоза которого были оценены по альтернативной процедуре, описанной в настоящем приложении, не должен быть использован как эталонный прицеп.
Х.2.1.2 Копии отчетов об испытаниях, выполненных в соответствии с приложениями Л и Ф.
Х.2.1.3 Комплект документов, содержащих соответствующую подтверждающую информацию, включая расчеты, по следующим параметрам и характеристикам:
|
Требования к рабочим характеристикам торможения |
Раздел приложения X |
|
Эффективность рабочего торможения при «холодных» тормозах |
|
|
Эффективность стояночных тормозов |
|
|
Эффективность аварийного торможения |
|
|
Работоспособность при возникновении неисправности в системе распределения тормозного момента |
|
|
Эффективность торможения с помощью АБС |
Х.2.1.4 Прицеп, представляющий собой тип прицепов, подлежащих альтернативной оценке (далее - оцениваемый прицеп).
Х.2.2 Изготовителем эталонного прицепа и оцениваемого прицепа должен быть один и тот же субъект.
Х.3 Альтернативная процедура демонстрации эффективности рабочего торможения в испытании «Тип-0» (при «холодных» тормозах)
Х.3.1 Для демонстрации соответствия оцениваемого прицепа требованиям к эффективности рабочего торможения при «холодных» тормозах (в испытании «Тип-0») необходимо подтвердить расчетом, что оцениваемый прицеп развивает тормозную силу TR, достаточную для достижения предписанной эффективности рабочего торможения, и что в контакте с сухой дорожной поверхностью коэффициент сцепления имеет значение, при котором такая тормозная сила реализуется (предполагают, что коэффициент сцепления равен 0,8).
Х.3.2 Считают, что требования В.1.2.7 и В.3.1.2 [(приложение В) к эффективности «холодного» торможения, а также к отсутствию блокировки колес, отклонений от заданного направления движения и вибраций] оцениваемого прицепа как в груженом, так и в порожнем состояниях выполнены при условии удовлетворения критериям оценки, изложенным ниже:
Х.3.2.1 Колесная база оцениваемого прицепа должна составлять не менее 80 % базы эталонного прицепа.
Х.3.2.2 Разность между моментами на входе в тормоз для осей тележки оцениваемого прицепа не должна отличаться от соответствующей разности моментов эталонного прицепа.
Х.3.2.3 Число и конфигурация осей (подъемных, управляемых и т.п.) оцениваемого прицепа не должны отличаться от числа и конфигурации осей эталонного прицепа.
Х.3.2.4 Распределение (в процентах) статических нагрузок на оси оцениваемого прицепа не должно отличаться от аналогичных показателей эталонного прицепа более чем на 10 %.
Х.3.2.5 Для полуприцепов должен быть построен график в соответствии с дополнением 2 к настоящему приложению, и на основании этого графика должно быть подтверждено, что:
TR max ≥ TR pr, т.е. горизонталь 1 не должна быть расположена ниже горизонтали 3;
TRL ≥ TR pr т.е. горизонталь 2 не должна быть расположена ниже горизонтали 3.
Х.3.2.6 Для прицепов с центральной осью должен быть построен график в соответствии с дополнением 3 к настоящему приложению, и на основании этого графика должно быть подтверждено, что:
TR max ≥ TR pr, т.е. - горизонталь 1 не должна быть расположена ниже горизонтали 3;
TRL ≥ TR pr т.е. горизонталь 2 не должна быть расположена ниже горизонтали 3.
Х.3.2.7 Для полных прицепов должен быть построен график в соответствии с дополнением 4 к настоящему приложению, и на основании этого графика должно быть подтверждено, что:
TR max ≥ TR pr, т.е. - горизонталь 1 не должна быть расположена ниже горизонтали 3;
TR Lf ≥ TR prf, т.е. горизонталь 4 не должна быть расположена ниже горизонтали 3 и
TR Lr ≥ TR prr т.е. горизонталь 6 не должна быть расположена ниже горизонтали 5.
Х.4 Альтернативная процедура демонстрации эффективности стояночной тормозной системы
Х.4.1 Общие положения
Х.4.1.1 Процедура представляет собой альтернативу физическому испытанию прицепа на поверхности с уклоном или подъемом и обеспечивает подтверждение выполнения предписанной эффективности стояночной тормозной системы прицепа с механически активизируемыми пружинными тормозами. Данная процедура не должна быть применена к прицепам, снабженным механизмами стояночной тормозной системы иными, чем пружинные тормоза. Такие прицепы должны быть подвергнуты физическому испытанию, описываемому в приложении В.
Х.4.1.2 Соответствие предписанной эффективности стояночной тормозной системы должно быть продемонстрировано расчетом с использованием формул, приведенных в Х.4.2 и Х.4.3.
Х.4.2 Эффективность стояночной тормозной системы
Х.4.2.1 Стояночную тормозную силу на периферии шин оси (осей), затормаживаемой (затормаживаемых) пружинными тормозами, которые активизируются механизмом стояночной тормозной системы, рассчитывают по формуле
![]()
Х.4.2.2 Нормальную реакцию на оси неподвижного прицепа со стороны дорожной поверхности, имеющей подъем или уклон 18 %, рассчитывают по формулам:
Х.4.2.2.1 Для полного прицепа:
Х.4.2.2.1.1 расположенного на подъеме:
![]()
![]()
![]()
![]()
X.4.2.2.1.2 расположенного на уклоне:
![]()
![]()
![]()
![]()
X.4.2.2.2 Для прицепа с центральной осью:
Х.4.2.2.2.1 стоящего на подъеме:
![]()
![]()
X.4.2.2.2.2 стоящего на уклоне:
![]()
![]()
X.4.2.2.3 Для полуприцепа:
X.4.2.2.3.1 стоящего на подъеме:
![]()
![]()
X.4.2.2.3.2 стоящего на уклоне:
![]()
![]()
X.4.3 Подтверждение эффективности
X.4.3.1 Эффективность стояночного тормоза прицепа подтверждают с использованием формул
![]()
и
![]()
Х.5 Альтернативная процедура демонстрации эффективности аварийного/автоматического торможения
Х.5.1 Общие положения
Х.5.1.1 Для демонстрации соответствия прицепа требованиям к эффективности автоматического торможения либо проводят сравнение давления в тормозной камере, необходимого для получения установленной эффективности, с асимптотическим давлением в тормозной камере после отсоединения питающей магистрали (см. Х.5.2.1), либо подтверждают, что тормозная сила, развиваемая на оси (осях), укомплектованной пружинными тормозами, достаточна для получения эффективности, предписываемой в Х.5.2.2.
Х.5.2 Подтверждение
Х.5.2.1 Считают, что требования В.3.3 (приложение В) к оцениваемому прицепу выполнены, если асимптотическое давление в тормозной камере рс после отсоединения питающей магистрали больше, чем давление в тормозной камере, необходимое для достижения эффективности торможения (тормозной силы на колесах), равной 13,5 % максимальной статической нагрузки на колеса. Давление в питающей магистрали перед отсоединением должно быть стабилизировано на уровне 7,0 бар.
Х.5.2.2 Считают, что требования В.3.3 (приложение В) к пружинным тормозам оцениваемого прицепа выполнены, если
Tpi ≥ 0,135 PRg,
где Tpi рассчитывают в соответствии с Х.4.2.1.
Х.6 Альтернативная процедура демонстрации эффективности рабочего торможения при возникновении неисправности в системе распределения тормозного момента по осям
Х.6.1 Общие положения
Х.6.1.1 Для демонстрации соответствия требованиям к эффективности торможения в случае возникновения неисправности в системе распределения тормозного момента проводят сравнение между давлением в тормозной камере, необходимым для получения требуемой эффективности торможения, и давлением в тормозной камере, достижимым при наличии неисправности в системе распределения тормозного момента.
Х.6.2 Подтверждение
Х.6.2.1 Считают, что требования К.6 (приложение К) к оцениваемому прицепу выполнены, если давление, определяемое в Х.6.2.1.1, превышает давление, определяемое в Х.6.2.1.2, как на груженом, так и на порожнем прицепах:
Х.6.2.1.1 давление в тормозной камере рс оцениваемого прицепа при рт = 6,5 бар, давлении в питающей магистрали 7,5 бар и наличии неисправности в системе распределения тормозного момента;
Х.6.2.1.2 давление в тормозной камере рс, необходимое для достижения удельной тормозной силы, равной 30 % эффективности рабочего торможения, предписанной для оцениваемого прицепа.
Х.7 Альтернативная процедура демонстрации эффективности антиблокировочной тормозной системы
Х.7.1 Общие положения
Х.7.1.1 Допускается не проводить испытание прицепа в соответствии с приложением Н, если АБС соответствует требованиям приложения Ф.
Х.7.2 Подтверждение
Х.7.2.1 Проверка компонентов АБС и их установки
Выполнение требований к АБС, установленной (установленным) на прицеп, необходимо подтвердить, выявляя соответствие компонентов АБС следующим критериям:
|
|
|
Компонент АБС и/или его характеристики |
Критерий |
|
Х.7.2.1.1 |
а) |
Датчик (датчики) |
Замена не допускается |
|
|
б) |
Контроллер (контроллеры) |
Замена не допускается |
|
|
в) |
Модулятор (модуляторы) |
Замена не допускается |
|
Х.7.2.1.2 |
|
Размеры патрубков (шлангов) |
|
|
|
а) |
Патрубок (шланг) подачи сжатого воздуха из резервуара в модулятор |
|
|
|
|
Минимальный внутренний диаметр |
Допускается увеличение |
|
|
|
Максимальная общая длина |
Допускается уменьшение |
|
|
б) |
Патрубок (шланг) подачи сжатого воздуха из модулятора в тормозные камеры |
|
|
|
|
Минимальный внутренний диаметр |
Изменения не допускаются |
|
|
|
Максимальная общая длина |
Допускается уменьшение |
|
Х.7.2.1.3 |
|
Последовательность включения предупреждающих сигналов |
Изменения не допускаются |
|
Х.7.2.1.4 |
|
Отклонения в значениях момента на входе в тормоз для осей одной тележки |
Только в пределах допуска (если таковой имеется) |
|
Х.7.2.1.5 |
|
Другие ограничения по установке элементов АБС в соответствии с разделом 4 дополнения 6 к приложению Ф |
Установка должна быть выполнена в пределах предписанных ограничений. Отклонения не допускаются |
Х.7.3 Проверка объема резервуара
Х.7.3.1 Поскольку на прицепы могут быть установлены различные тормозные системы и вспомогательное оборудование, привести значения рекомендуемых объемов резервуара в виде таблицы не представляется возможным. Для подтверждения того, что на прицеп установлен резервуар адекватного объема, необходимо провести тестирование в соответствии с Н.6.1 (приложение Н) или используя процедуру, изложенную ниже:
Х.7.3.1.1 Если устройства компенсации износа не встроены в тормоза оцениваемого прицепа, тормоза должны быть отрегулированы так, чтобы при давлении в тормозной камере, равном 6,5 бар:
![]()
где sT - ход штока тормозной камеры;
lт - длина рычага привода тормоза.
Х.7.3.1.2 При автоматических устройствах компенсации износа, встроенных в тормоза, в тормозах должен быть установлен нормальный рабочий зазор.
Х.7.3.1.3 Регулировки тормозов, описанные выше, должны быть выполнены при «холодных тормозах» (при температуре, не превышающей 100 °С).
Х.7.3.1.4 При тормозах, отрегулированных в соответствии с подходящей для их конструкции процедурой (Х.7.3.1.1 или Х.7.3.1.2), снабженных устройством (устройствами), чувствительным к нагрузке, установленным в положение для груженого прицепа, и имеющих начальный уровень аккумулированной энергии, установленный в соответствии с Н.6.1.2 (приложение Н), аккумулятор (аккумуляторы) энергии должен быть изолирован от дальнейшего ее поступления. Тормоза должны быть активизированы при давлении в управляющей магистрали, измеренном в соединительной головке, равном 6,5 бар, и затем полностью отпущены. Далее необходимо проводить последовательно циклы активизации и освобождения тормозов, пока число циклов не достигнет значения пе - величины, определяемой в испытании, проведенном в соответствии с Ф.5.4.1.2.4.2, и фиксируемой в пункте 2.5 отчета об испытаниях АБС, образец которого дан в дополнении 6 к приложению Ф. При этих активизациях давление в рабочем контуре должно быть достаточным для создания на периферии колес суммарной тормозной силы, составляющей не менее 22,5 % максимальной статической нагрузки на колеса, и не должно происходить активизации какой-либо тормозной системы ни в автоматическом режиме, ни под воздействием АБС.
Х.8 Проверки, касающиеся функционирования и установки АБС
Х.8.1 Испытательная лаборатория должна выполнять проверки, касающиеся функционирования и установки АБС, по следующим позициям:
Х.8.1.1 Функция предотвращения блокирования колес
Х.8.1.1.1 Следует ограничиться динамической проверкой АБС. Для обеспечения полной цикличности может оказаться необходимым отрегулировать устройство, чувствительное к нагрузке, или использовать поверхность с низким сцеплением шин с дорогой. Если АБС не имеет официального подтверждения соответствия требованиям приложения Ф, то прицеп необходимо испытать согласно приложению Н и подтвердить его соответствие распространяющимся на него требованиям этого приложения.
Х.8.1.2 Определение времени реакции
Х.8.1.2.1 Испытательная лаборатория должна подтвердить, что оцениваемый прицеп соответствует требованиям приложения Д.
Х.8.1.3 Расход энергии
Х.8.1.3.1 Испытательная лаборатория должна подтвердить, что оцениваемый прицеп соответствует распространяющимся на него требованиям приложений Е и Ж.
Х.8.1.4 Функционирование рабочих тормозов
Х.8.1.4.1 Испытательная лаборатория должна подтвердить, что в процессе торможения не возникают ощутимые вибрации.
Х.8.1.5 Функционирование стояночных тормозов
Х.8.1.5.1 Испытательная лаборатория должна активизировать и отпустить стояночный тормоз, чтобы убедиться в его надлежащем функционировании.
Х.8.1.6 Функция аварийного/автоматического торможения
Х.8.1.6.1 Испытательная лаборатория должна подтвердить, что оцениваемый прицеп соответствует требованиям 5.2.1.18.4.2.
Х.8.1.7 Подтверждение идентификации прицепа
Х.8.1.7.1 Испытательная лаборатория должна проверить соответствие оцениваемого прицепа детальному описанию эталонного прицепа в официальных документах (сертификате соответствия, одобрении типа).
Х.8.1.8 Дополнительные проверки
Х.8.1.8.1 Испытательная лаборатория может потребовать, в случае необходимости, проведения дополнительных проверок.
Дополнение 1
к приложению X
Метод расчета высоты центра масс
Высота центра масс прицепа в сборе (груженого и порожнего) может быть рассчитана следующим образом (см. рисунок Х.1):
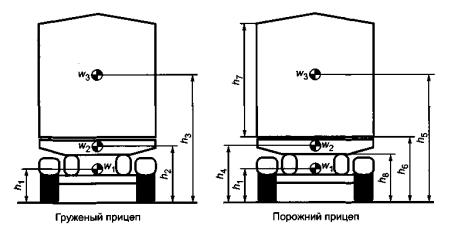
Рисунок Х.1 - Расположение центров масс отдельных элементов прицепа
Высота центра масс узла «ось (оси) в сборе», включая шины, элементы подвески и т.п.:
h1 = 1,1R;
высота центра масс рамы груженого ТС:
h2 = 0,5 (h6 + h8);
высота центра масс полезной нагрузки и надстройки (кузова):
h3 = h6 + 0,3 h7;
высота центра масс рамы порожнего ТС:
h4 = h2 + s;
высота центра масс надстройки (кузова) порожнего ТС:
h5 = h6 + 0,5 h7 + s,
где h6 - высота рамы (по верхней поверхности);
h7 - высота внутреннего пространства кузова;
h8 - высота рамы (по нижней поверхности);
R - радиус шины;
s - ход сжатия упругих элементов подвески при переходе от порожнего к груженому состоянию ТС. Масса узла «ось (оси) в сборе», включая шины, элементы подвески и т.п.:
W1 = 0,1Р.
Масса рамы:
W2 = 0,8 (Punl - W1).
Масса полезной нагрузки и надстройки (кузова) - W3.
Масса надстройки (кузова):
W4 = 0,2 (Punl - W1).
Высота центра масс груженого прицепа:
![]()
высота центра масс порожнего прицепа:
![]()
где Р - масса прицепа;
unl - нижний индекс, означающий порожний прицеп;
lad - нижний индекс, означающий груженый прицеп.
Примечания
1 Для низкорамных прицепов максимальную высоту центра масс (груженого прицепа) принимают равной 4 м.
2 Для прицепов, точная высота центра масс полезной нагрузки которых неизвестна, ее принимают как 0,3 h7.
3 Для прицепов с пневматической подвеской принимают s = 0.
4 Для полуприцепов и прицепов с центральной осью вместо Р в расчетные формулы подставляют PR - массу, приходящуюся на колеса полуприцепа или прицепа с центральной осью.
Дополнение 2
к приложению X
Подтверждение требований к зависимости тормозной силы от давления в тормозной системе полуприцепа
(см. Х.3.2.5)
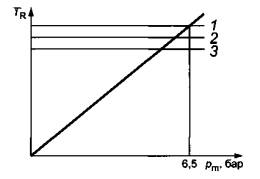
Рисунок Х.2
Уровень 1 соответствует TR max, когда давление рm = 6,5 бар и давление в питающей магистрали равно 7,0 бар;
уровень 2 соответствует TRL = 0,8 FR dyn;
уровень 3 соответствует TR pr = 0,45 FR,
![]()
Значение zc рассчитывают по формуле
![]()
Примечания
1 Значение 7000 представляет собой массу буксирующего ТС при отсоединенном прицепе.
2 Для данного расчета сближенные оси (с расстоянием между осями менее 2 м) могут быть рассмотрены как одна ось.
Дополнение 3
к приложению X
Подтверждение требований к зависимости тормозной силы от давления в тормозной системе прицепа с центральной осью
(см. Х.3.2.6)
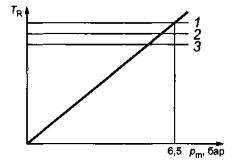
Рисунок Х.3
Уровень 1 соответствует TR max, когда давление рm = 6,5 бар и давление в питающей магистрали равно 7,0 бар;
уровень 2 соответствует TRL = 0,8 FR dyn;
уровень 3 соответствует TR pr = 0,5 FR,
![]()
Значение zc рассчитывают по формуле
![]()
Примечания
1 7000 - это масса буксирующего ТС при отсоединенном прицепе.
2 Для данного расчета сближенные оси (с расстоянием между осями менее 2 м) могут быть рассмотрены как одна ось.
Дополнение 4
к приложению X
Подтверждение требований к зависимости тормозной силы от давления в тормозной системе полного прицепа
(см. Х.3.2.7)
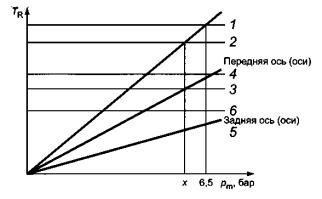
Рисунок Х.4
Уровень 1 соответствует TR max, когда давление рm = 6,5 бар и давление в питающей магистрали равно 7,0 бар;
уровень 2 соответствует TR pr = 0,5 FR;
уровень 3 соответствует TR f = TR prf, когда давление рm = х;
уровень 4 соответствует TRLf = 0,8 Ffdyn;
уровень 5 соответствует TRr = TRprr когда pm = x;
уровень 6 соответствует TRLr = 0,8 Frdyn
![]()
и
![]()
Значение zc рассчитывают по формуле
![]()
![]()
Примечания
1 7000 - это масса буксирующего ТС при отсоединенном прицепе.
2 Для данного расчета сближенные оси (с расстоянием между осями менее 2 м) могут быть рассмотрены как одна ось.
Дополнение 5
к приложению X
Условные обозначения
ADi - ADi = Tpi, когда Tpi ≤ 0,8NFdi, и ADi = 0,8NFdi, - когда Tpi > 0,8NFDi
(для передних осей);
BDi - BDi = Tpi, когда Tpi ≤ 0,8NRdi, и BDi = 0,8NRdi, - когда Tpi > 0,8NRDi
(для задних осей);
AUi - AUi = Tpi, когда Tpi ≤ 0,8NFui, и AUi = 0,8NFui, - когда Tpi > 0,8NFUi
(для передних осей);
BUi - BUi = Tpi, когда Tpi ≤ 0,8NRui, и BUi = 0,8NRui, - когда Tpi > 0,8NRUi
(для задних осей);
BF - коэффициент торможения;
С0 - пороговый момент на разжимном кулачке (минимальный момент на кулачке, при котором генерируется тормозной момент, улавливаемый измерительной аппаратурой);
Е - колесная база;
EL - расстояние между опорной стойкой дышла прицепа и осью (осями) для прицепа с центральной осью или опорными стойками полуприцепа и осью (осями) для полуприцепа;
ER - расстояние между шкворнем и осью (средней плоскостью между сближенными осями) для полуприцепа;
F - сила, Н;
Ff - суммарная вертикальная статическая реакция со стороны опорной поверхности на переднюю ось (оси);
Ff dyn - суммарная вертикальная динамическая реакция со стороны опорной поверхности на переднюю ось (оси);
Fr - суммарная вертикальная статическая реакция со стороны опорной поверхности на заднюю ось (оси);
Fr dyn - суммарная вертикальная динамическая реакция со стороны опорной поверхности на заднюю ось (оси);
FR - суммарная вертикальная статическая реакция со стороны опорной поверхности на все колеса прицепа (полуприцепа);
FR dyn - суммарная вертикальная динамическая реакция со стороны опорной поверхности на все колеса прицепа (полуприцепа);
g - ускорение силы тяжести (9,81 м/с2);
h - высота центра масс относительно опорной поверхности;
hk - высота седла седельного тягача (или шкворня полуприцепа);
hr - высота центра масс прицепа;
i - индекс порядкового номера оси;
iF - число передних осей;
ir - число задних осей;
l - плечо рычага привода тормоза;
п - число пружинных приводов, приходящихся на одну ось;
NFD - суммарная реакция со стороны опорной поверхности на переднюю ось (оси), когда ТС расположено на уклоне 18 %;
NFDi - суммарная реакция со стороны опорной поверхности на i-ю переднюю ось, когда ТС расположено на уклоне 18 %;
NFU - суммарная реакция со стороны опорной поверхности на переднюю ось (оси), когда ТС расположено на подъеме 18 %;
NFUi - суммарная реакция со стороны опорной поверхности на i-ю переднюю ось, когда ТС расположено на подъеме 18 %;
NRD - суммарная реакция со стороны опорной поверхности на заднюю ось (оси), когда ТС расположено на уклоне 18 %;
NRDi - суммарная реакция со стороны опорной поверхности на i-ю заднюю ось, когда ТС расположено на уклоне 18 %;
NRU - суммарная реакция со стороны опорной поверхности на заднюю ось (оси), когда ТС расположено на подъеме 18 %;
NRUi - суммарная реакция со стороны опорной поверхности на i-ю заднюю ось, когда ТС расположено на подъеме 18 %;
рm - давление в управляющей магистрали (в соединительной головке);
рс - давление в тормозной камере;
Р - масса одиночного ТС;
Ps - масса полуприцепа, приходящаяся на седло тягача;
PR - суммарная статическая реакция горизонтальной опорной поверхности, приходящаяся на колеса прицепа (полуприцепа);
PRF - статическая реакция горизонтальной опорной поверхности, приходящаяся на переднюю ось (оси);
PRR - статическая реакция горизонтальной опорной поверхности, приходящаяся на заднюю ось (оси);
Rs - статический радиус шины под действием вертикальной нагрузки, рассчитываемый по формуле
Rs = 0,5 dr + Fr H,
где dr - номинальный диаметр обода;
Н - конструктивная высота профиля шины;
Fr - коэффициент вертикальной деформации профиля шины;
Tpi - тормозная сила на периферии всех колес i-й оси, генерируемая пружинным тормозом (тормозами);
Ths - толкающая сила, вызываемая пружинным тормозом (тормозами);
TR - суммарная тормозная сила на периферии всех колес прицепа (полуприцепа);
TRf - суммарная тормозная сила на периферии передних колес прицепа (полуприцепа);
TRr - суммарная тормозная сила на периферии задних колес прицепа (полуприцепа);
TR max - сумма максимально достижимых тормозных сил на периферии всех колес прицепа (полуприцепа);
TRL - предельная суммарная тормозная сила на периферии колес прицепа (полуприцепа) по условиям сцепления с опорной поверхностью;
TRLf - предельная суммарная тормозная сила на периферии передних колес прицепа (полуприцепа) по условиям сцепления с опорной поверхностью;
TRLr - предельная суммарная тормозная сила на периферии задних колес прицепа (полуприцепа) по условиям сцепления с опорной поверхностью;
TRpr - суммарная тормозная сила на периферии колес прицепа (полуприцепа), необходимая для достижения предписанной эффективности торможения;
TR prf - суммарная тормозная сила на периферии передних колес прицепа (полуприцепа), необходимая для достижения предписанной эффективности торможения;
TRprr - суммарная тормозная сила на периферии задних колес прицепа (полуприцепа), необходимая для достижения предписанной эффективности торможения;
zc - удельная тормозная сила комбинации ТС при торможении только прицепом;
cos (Р) - косинус угла, соответствующего отклонению 18 % от горизонтальной плоскости, cos (P) = 0,98418;
tg (Р) - тангенс угла, соответствующего отклонению 18 % от горизонтальной плоскости, tg (P) = 0,18.
Приложение Ц
(справочное)
Сведения о соответствии ссылочных международных (региональных) стандартов национальным стандартам Российской Федерации, использованным в настоящем стандарте в качестве нормативных ссылок
Таблица Ц.1
|
Обозначение ссылочного национального стандарта Российской Федерации |
Обозначение и наименование ссылочного международного (регионального) стандарта и условное обозначение степени его соответствия ссылочному национальному стандарту |
|
Правила ЕЭК ООН № 10 Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении электромагнитной совместимости (IDT) |
|
|
ГОСТ Р 41.54-99 |
Правила ЕЭК ООН № 54 Единообразные предписания, касающиеся официального утверждения шин для грузовых транспортных средств и их прицепов (IDТ) |
|
ГОСТ Р 41.64-99 |
Правила ЕЭК ООН № 64 Единообразные предписания, касающиеся официального утверждения транспортных средств, оборудованных запасными колесами (шинами) для временного пользования (IDТ) |
|
Сводная резолюция о конструкции транспортных средств (СРЗ), Приложение 7/Пересмотр 2 от 16 апреля 1999 г. «Классификация и определение механических транспортных средств и прицепов» (MOD) |
|
|
ГОСТ 29200-91 |
ИСО 9128:1987 Транспорт дорожный. Графические условные обозначения типов жидкостей для гидравлических тормозов (IDТ) |
|
Примечание - В настоящей таблице использованы следующие условные обозначение степени соответствия стандартов: - IDТ - идентичные стандарты; - MOD - модифицированные стандарты. |
|
Приложение Ш
(справочное)
Сопоставление структуры настоящего стандарта со структурой Правил ЕЭК ООН № 13
Таблица Ш.1
|
Структура Правил ЕЭК ООН № 13 |
Структура настоящего стандарта |
|
1 Область применения |
1 Область применения |
|
|
1а Нормативные ссылки 1) |
|
2 Определения |
2 Термины и определения1), 2) |
|
3 Заявка на официальное утверждение |
3 Заявка на проведение испытаний 2) |
|
4 Официальное утверждение |
4 Оформление протокола испытаний 2) |
|
5 Общие требования |
5 Технические требования |
|
6 Испытания |
6 Испытания |
|
7 Изменение типа транспортного средства или его официального утверждения |
7 Изменение типа транспортного средства или типа тормозной системы, выдержавших испытания на соответствие настоящему стандарту 2) |
|
8 Соответствие производства |
— 3) |
|
9 Санкции, налагаемые за несоответствие производства |
— 3) |
|
10 Окончательное прекращение производства |
— 3) |
|
11 Наименования и адреса технических служб, уполномоченных проводить испытания для официального утверждения, и административных органов |
— 3) |
|
12 Переходные положения |
— 3) |
|
Приложение 1 Оборудование, устройства, методы и условия торможения, на которые не распространяется настоящий стандарт |
Приложение А Тормозное оборудование, устройства, методы и условия, на которые не распространяется настоящий стандарт |
|
Приложение 2 Сообщение |
Приложение Б Форма приложения к протоколу испытаний транспортного средства в отношении торможения2' |
|
Приложение 3 Схемы знаков официального утверждения |
—3) |
|
Приложение 4 |
|
|
Приложение 5 |
|
|
Приложение 6 |
|
|
Приложение 7 |
|
|
Приложение 8 |
|
|
Приложение 9 |
|
|
Приложение 10 |
|
|
Приложение 11 |
|
|
Приложение 12 |
|
|
Приложение 13 |
|
|
Приложение 14 |
|
|
Приложение 15 |
|
|
Приложение 16 |
|
|
Приложение 17 |
|
|
Приложение 18 |
|
|
Приложение 19 |
|
|
Приложение 20 |
|
|
- |
Приложение Ц 1) |
|
- |
Приложение Ш 1) |
|
- |
Библиография 1) |
|
1) Включение в настоящий стандарт данного раздела (приложения) обусловлено необходимостью приведения его в соответствие с требованиями ГОСТ Р 1.5 - 2004. 2) Включены термины и положения, относящиеся к испытаниям, взамен терминов и положений, касающихся процедур сертификации. В соответствии с Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании» термины и положения, касающиеся процедур сертификации, могут быть применены только в технических регламентах. 3) Не включены разделы и приложения, относящиеся к процедуре сертификации или относящиеся к применению Правил ЕЭК ООН в рамках Европейской экономической комиссии ООН (ЕЭК ООН). |
|
Библиография
|
Международный стандарт ИСО 11992-1:2003 |
Транспорт дорожный. Обмен цифровой информацией об электрических соединениях между тягачами и прицепами. Часть 1. Физический и канальный уровень |
|
|
|
(ISO 11992-1:2003) |
(Road vehicles - Interchange of digital information on electrical connections between towing and towed vehicles - Part 1: Physical and data-link layers) |
|
Международный стандарт ИСО 11992-2:2003 |
Транспорт дорожный. Обмен цифровой информацией об электрических соединениях между тягачами и прицепами. Часть 2. Прикладной уровень для тормозов и ходовой части |
|
|
|
(ISO 11992-2:2003) |
(Road vehicles - Interchange of digital information on electrical connections between towing and towed vehicles - Part 2: Application layer for brakes and running gear) |
|
Международный стандарт ИСО 7638-1:2003 |
Транспорт дорожный. Соединители для электрического соединения тягача с прицепом. Часть 1. Соединители для тормозных систем и ходовой части транспортных средств с номинальным напряжением питания 24 В |
|
|
|
(ISO 7638-1:2003) |
(Road vehicles - Connectors for the electrical connection of towing and towed vehicles - Part 1: Connectors for braking systems and running gear of vehicles with 24 V nominal supply voltage) |
|
Международный стандарт ИСО 7638-2:2003 |
Транспорт дорожный. Соединители для электрического соединения тягача с прицепом. Часть 2. Соединители для тормозных систем и ходовой части транспортных средств с номинальным напряжением питания 12 В |
|
|
|
(ISO 7638-2:2003) |
(Road vehicles - Connectors for the electrical connection of towing and towed vehicles - Part 2: Connectors for braking systems and running gear of vehicles with 12 V nominal supply voltage) |
|
Международный стандарт ИСО 3583:1984 |
Транспорт дорожный. Соединения для измерения давления в пневматических тормозных системах |
|
|
|
(ISO 3583:1984) |
(Road vehicles - Pressure test connection for compressed-air pneumatic braking equipment) |
|
ECE/TRANS/160 ДОПОГ |
Европейское соглашение о международной дорожной перевозке опасных грузов (ДОПОГ). ООН, Женева, 2002 (European agreement concerning the international carriage of dangerous goods by road (ADR). U.N.O. Geneva, 2002) |
Ключевые слова: автотранспортные средства, автотранспортные тормоза, пневматические тормозные системы, гидравлические тормозные системы, пружинные тормоза, стояночные тормоза, характеристики тормозных систем, распределение торможения по осям транспортных средств, испытания